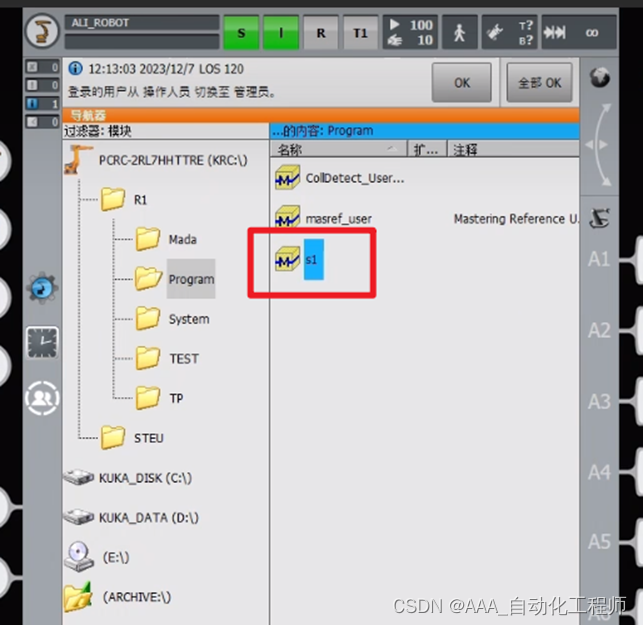
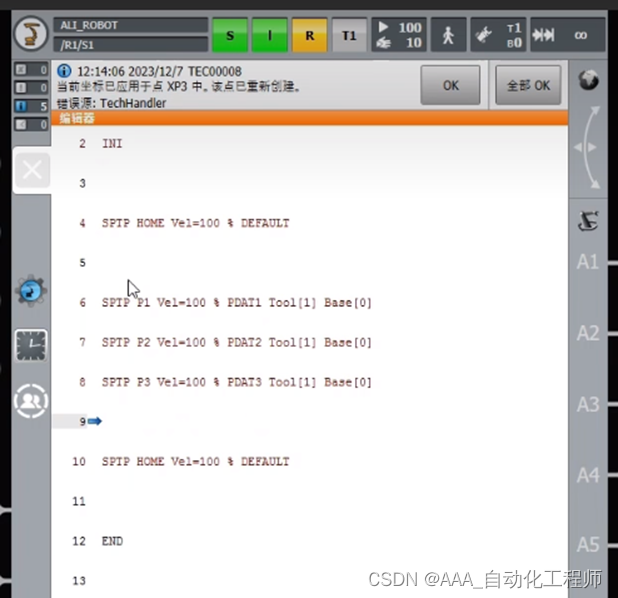
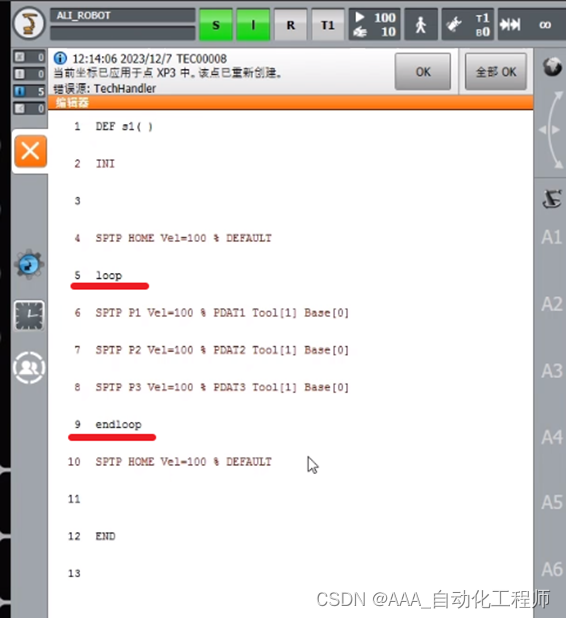
KUKA机器人Loop循环的具体使用方法示例 如下图所示,新建一个示例程序, 如下图所示,添加一些动作指令, 如下图所示,如果想要机器人在第5行和第9行之间循环执行程序,则可以在第5行添加指令loop,在第9行添加指令endloop, 如下图所示,指令语句添加完成后,按照提示进行保存,


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 超级会员免费看
超级会员免费看
 本文通过示例详细介绍了KUKA机器人如何使用Loop循环。在新建的程序中,添加动作指令后,通过在特定行插入loop和endloop指令实现循环执行。程序运行时,机器人将按照设定在loop和endloop之间重复执行,直至接收到stop信号才停止。
本文通过示例详细介绍了KUKA机器人如何使用Loop循环。在新建的程序中,添加动作指令后,通过在特定行插入loop和endloop指令实现循环执行。程序运行时,机器人将按照设定在loop和endloop之间重复执行,直至接收到stop信号才停止。


 订阅专栏 解锁全文
订阅专栏 解锁全文



















 966
966







