






四轮轮毂电机驱动车辆,驱动电机故障状态估计(UKF)
软件使用:Matlab Simulink
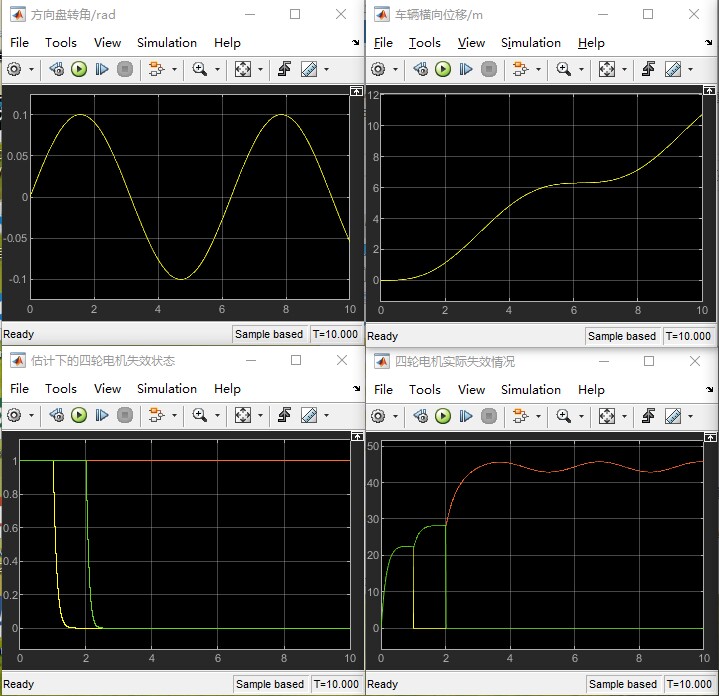
适用场景:采用无迹卡尔曼滤波UKF进行轮毂电机状态估计,失效电机估计状态为0,正常电机状态为1。
产品simulink源码包含如下模块:
→工况:方向盘正弦输入
→整车模块:7自由度整车模型
→估计模块:无迹卡尔曼滤波
包含:simulink源码文件,详细建模说明文档,对应参考资料。
适用于需要或想学习整车动力学simulink建模,以及simulink状态估计算法建模的朋友。
模型运行完全OK(仅适用于MATLAB17版本及以上)
ID:73285645173026500
青青猪儿
四轮轮毂电机驱动车辆已经成为了现代汽车领域的一个热门话题。随着电动车技术的不断发展,越来越多的汽车制造商开始采用四轮轮毂电机作为动力系统,以提高车辆的性能和驾驶体验。
然而,四轮轮毂电机的故障状态估计一直是一个具有挑战性的问题。在实际应用中,我们经常需要准确地估计每个轮毂电机的工作状态,以便及时发现故障并采取相应的措施。
在本文中,我们将介绍一种基于无迹卡尔曼滤波(UKF)的方法来进行四轮轮毂电机故障状态估计。这种方法使用Matlab Simulink软件实现,并适用于各种不同的应用场景。
首先,我们需要准备一些必要的软件和模型。我们使用Matlab Simulink软件来进行模拟和仿真。在Simulink中,我们建立了一个包含方向盘正弦输入、整车模块和估计模块的模型。
方向盘正弦输入模块用于生成方向盘输入信号,以模拟实际驾驶场景。整车模块是一个7自由度整车模型,用于模拟车辆的运动和动力学特性。估计模块则是使用无迹卡尔曼滤波算法对轮毂电机的状态进行估计。
在模型运行时,我们可以观察到估计模块输出的结果。如果输出状态为1,则表示对应的电机正常工作;如果输出状态为0,则表示对应的电机故障。
在实际应用中,我们可以根据估计模块的输出状态来及时判断轮毂电机是否存在故障,并采取相应的维修措施。这种方法不仅可以提高车辆的可靠性和安全性,还能够降低维修成本和维修时间。
总之,通过采用无迹卡尔曼滤波(UKF)进行四轮轮毂电机故障状态估计,我们可以准确地估计每个轮毂电机的工作状态,并及时发现故障。这种方法在实际应用中具有很大的潜力,可以在提高车辆性能和驾驶体验的同时,降低维修成本和维修时间。
对于那些对整车动力学Simulink建模和状态估计算法建模感兴趣的朋友,我们提供了相应的Simulink源码文件和详细建模说明文档,并附带了对应的参考资料。通过学习和理解这些源码和文档,你可以更好地掌握Simulink建模技术和状态估计算法,并将其应用于实际项目中。
需要注意的是,我们提供的Simulink源码文件和文档仅适用于MATLAB17版本及以上。如果你的MATLAB版本低于17,可能无法正常运行这些模型。
希望通过本文的介绍和提供的资源,能够帮助到那些对四轮轮毂电机故障状态估计感兴趣的读者和专业人士。如果你有任何问题或者需要进一步的帮助,请随时与我们联系。我们将竭诚为您提供支持和解答。
相关的代码,程序地址如下:http://imgcs.cn/645173026500.html
















 1468
1468

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









