







诱致在我理解当中是诱导,推导的意思,即通过某个映射推导出了另一个映射
C
∈
X
C\in X
C∈X 一般
X
=
R
k
X=R^k
X=Rk,C是某个博弈方混合策略的单纯形或者该博弈的混合策略集合;
ξ
(
t
,
x
0
)
\xi(t,x^0)
ξ(t,x0)为微分方程经过
x
0
x^0
x0的解;
T
(
x
0
)
⊂
R
T(x^0)\subset R
T(x0)⊂R为通过
x
0
x^0
x0的解得到的定义的开时间区间。
对于所有的
t
∈
T
(
x
0
)
t \in T(x^0)
t∈T(x0)总有
x
0
∈
C
x^0\in C
x0∈C和
ξ
(
t
,
x
0
)
∈
C
\xi (t,x^0)\in C
ξ(t,x0)∈C,且
ξ
(
t
,
x
0
)
\xi(t,x^0)
ξ(t,x0)是全局的。
命题 6.1 解映射满足的条件
假设
x
⊂
X
x\subset X
x⊂X开的,
ϕ
:
X
→
R
k
\phi:X\rightarrow R^k
ϕ:X→Rk是里普菲茨连续的,C是X的一个紧子集使得
ξ
(
t
,
x
0
)
∈
C
\xi(t,x^0)\in C
ξ(t,x0)∈C对所有
x
0
∈
C
x^0\in C
x0∈C和
t
∈
T
(
x
0
)
t\in T(x^0)
t∈T(x0)都成立,那么引致的解映射
ξ
:
R
×
C
→
C
\xi:R \times C\rightarrow C
ξ:R×C→C满足以下三个条件:
{
ξ
(
0
,
x
)
=
x
,
∀
x
∈
C
(
6.5
)
ξ
[
t
,
ξ
(
s
,
x
)
]
=
ξ
(
t
+
s
,
x
)
,
∀
x
∈
C
,
∀
s
,
t
∈
R
(
6.6
)
ξ
连续(
6.7
)
\begin{cases} \xi(0,x)=x,\forall x\in C (6.5)\\ \xi[t,\xi(s,x)]=\xi(t+s,x),\forall x\in C,\forall s,t\in R(6.6)\\ \xi 连续(6.7) \end{cases}
⎩
⎨
⎧ξ(0,x)=x,∀x∈C(6.5)ξ[t,ξ(s,x)]=ξ(t+s,x),∀x∈C,∀s,t∈R(6.6)ξ连续(6.7)
(6.5)说明,t=0时刻之后的状态等于初始状态
(6.6)说明,
ξ
\xi
ξ经由s个时间后达到的状态,在此状态下经由t个时间单位达到的状态==经由t+s个时间单位达到的状态。
(6.6)说明,从任何固定时间t来看,通过
x
0
x^0
x0附近的任何初始状态
y
0
y^0
y0的解轨迹经过
x
0
x^0
x0的解轨迹。
令 D = ( R , C , ξ ) D=(R,C,\xi) D=(R,C,ξ)是状态空间C上的一个动力系统,关键概念有如下几个:
轨迹
通过状态
x
0
x^0
x0的解是
ξ
(
⋅
,
x
0
)
\xi(·,x^0)
ξ(⋅,x0)的图,可表示为
τ
(
x
0
)
=
{
(
t
,
x
)
∈
R
×
C
:
x
=
ξ
(
t
,
x
0
)
}
\tau(x^0)=\{(t,x)\in R \times C:x=\xi(t,x^0)\}
τ(x0)={(t,x)∈R×C:x=ξ(t,x0)}
解映射在整个时间坐标下的像:
γ
(
x
0
)
=
{
对某个
t
∈
R
,
x
∈
C
:
x
=
ξ
(
t
,
x
0
)
}
\gamma(x^0)=\{对某个t\in R,x\in C:x=\xi(t,x^0)\}
γ(x0)={对某个t∈R,x∈C:x=ξ(t,x0)}
γ
(
x
0
)
\gamma(x^0)
γ(x0)是
τ
(
x
0
)
\tau(x^0)
τ(x0)到状态空间C的投影,是对整个时间坐标取状态空间的值。
解映射下非负时间轴的像:
γ
+
(
x
0
)
=
{
对某个
t
>
0
,
x
∈
C
:
x
=
ξ
(
t
,
x
0
)
}
\gamma^{+}(x^0)=\{对某个t>0,x\in C:x=\xi(t,x^0)\}
γ+(x0)={对某个t>0,x∈C:x=ξ(t,x0)}
存在子集
A
∈
C
A\in C
A∈C,集合
γ
+
(
A
)
\gamma^{+}(A)
γ+(A)被定义为满足
x
0
∈
A
x^0\in A
x0∈A的所有准轨迹
γ
+
(
x
0
)
\gamma^{+}(x^0)
γ+(x0)的并。
轨迹
γ
\gamma
γ+时间变量
t
t
t=解
ξ
\xi
ξ
集合的不变性与前向不变性
有个比较好理解的例子就是,一个小球放在圆锥里面,若给小球一个初速度,小球就会运动起来,运动轨迹唯一,最终停留在圆锥顶点处。圆锥就可以理解为一个前向不变集合,初速度就是流的大小和方向
ϕ
(
x
)
\phi(x)
ϕ(x),运动轨迹就是
γ
(
x
0
)
\gamma(x^0)
γ(x0),最终的红点就是稳态。
此处转自https://blog.csdn.net/XSTX1996/article/details/82079317
稳态
稳态就是对于实数范围内的任意时刻t都是同一个状态,也就是说状态不变,流没有大小和方向,这样状态子集是一个不变单点集,
γ
(
x
)
\gamma(x)
γ(x)是一个单点集。(轨迹的集合就是状态子集A)
命题6.3 极限状态的稳态
如果 x , y ∈ C x,y \in C x,y∈C,并且 l i m t → ∞ ξ ( t , x ) = y lim_{t\rightarrow \infty}\xi(t,x)=y limt→∞ξ(t,x)=y,那么y是稳态。
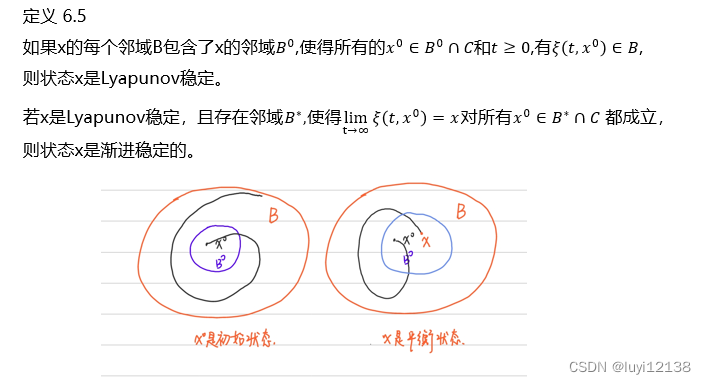
稳定性
单个状态的Lyapunovn稳定和渐进稳定
命题 6.4 如果一个状态时lyapunovn稳定的,那么它是稳态的
集合的两个稳定
单点引申到集合有如下三个概念需注意

吸引域

吸引子就相当于一个黑洞,某一个点
x
0
x^0
x0的轨迹绕着黑洞在转,最终趋向于集合A,这样点的集合称为A的吸引域。
本文参考《演化博弈论》乔根·W·布威尔 [著]















 1443
1443











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









