







Lec04 变换(续)
文章目录
3D变换(3D Transformation)
和2D类似的变换
同样使用齐次坐标系:
- 3D point = ( x , y , z , 1 ) ⊤ (x,y,z,1)^{\top} (x,y,z,1)⊤
- 3D vector = ( x , y , z , 0 ) ⊤ (x,y,z,0)^{\top} (x,y,z,0)⊤
用四维矩阵实现仿射变换:
[
x
′
y
′
z
′
1
]
=
[
a
b
c
t
x
d
e
f
t
y
g
h
i
t
z
0
0
0
1
]
[
x
y
z
1
]
\begin{bmatrix} x^{\prime}\\y^{\prime}\\z^{\prime}\\1 \end{bmatrix}= \begin{bmatrix} a&b&c&t_x\\ d&e&f&t_y\\ g&h&i&t_z\\ 0&0&0&1 \end{bmatrix} \begin{bmatrix} x\\y\\z\\1 \end{bmatrix}
⎣⎢⎢⎡x′y′z′1⎦⎥⎥⎤=⎣⎢⎢⎡adg0beh0cfi0txtytz1⎦⎥⎥⎤⎣⎢⎢⎡xyz1⎦⎥⎥⎤
三维空间中,缩放矩阵、平移矩阵和二维情况类似。
绕坐标轴旋转
唯独比较特殊的是旋转矩阵:
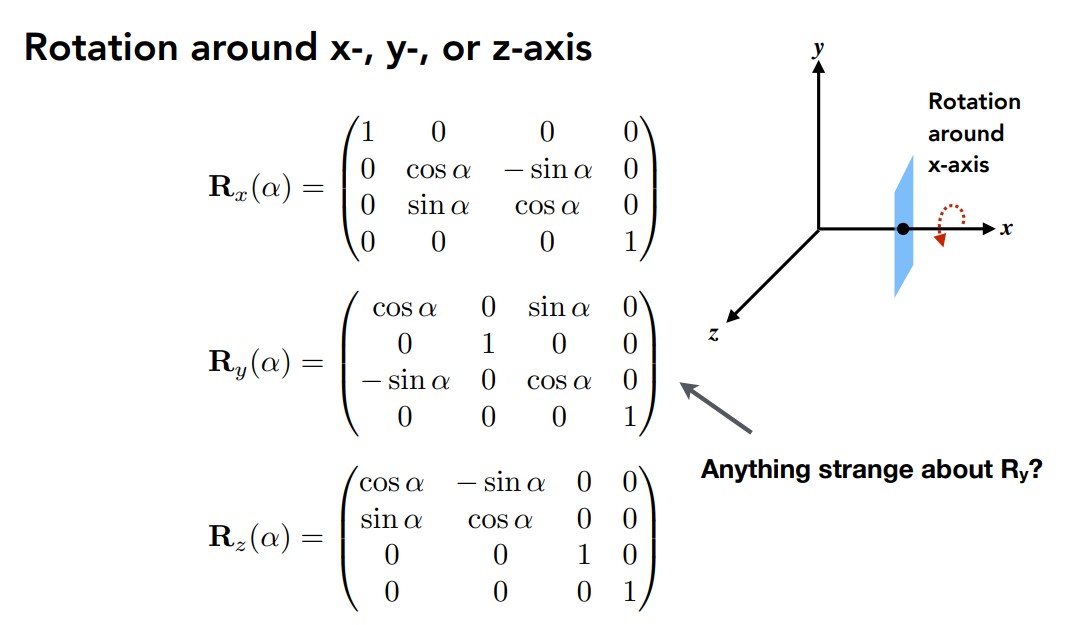
绕y轴旋转矩阵不一样的原因是: x × y = z x\times y=z x×y=z, y × z = x y\times z=x y×z=x,但是 x × z = − y x\times z=-y x×z=−y.
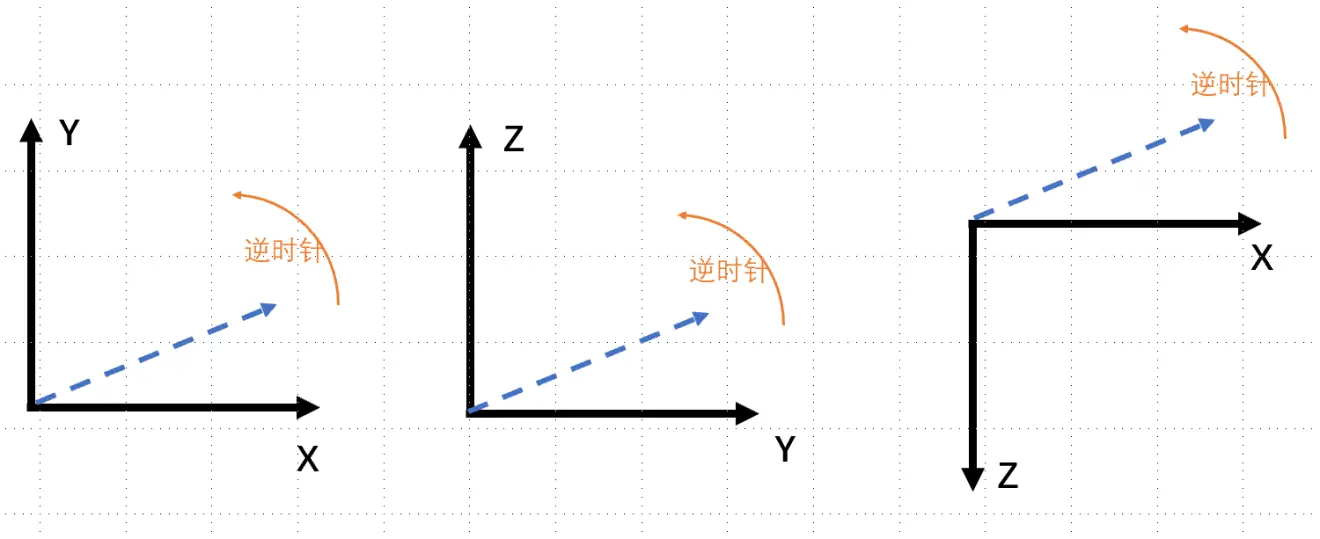
从y轴看过去,正常的逆时针旋转其实是x-z坐标轴下的顺时针。因此旋转角要取相反数。
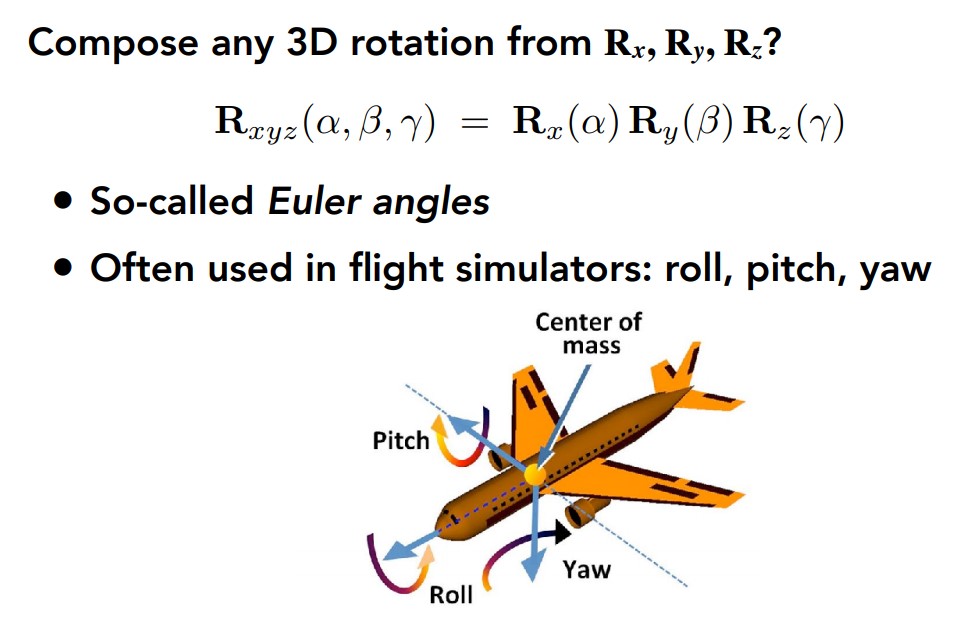
更一般的旋转
3D旋转需要给定旋转轴和旋转角度,然后可以分解为以下三个步骤:
-
将轴平移到原点(其实大多数情况下轴都默认经过原点)
-
绕轴旋转。因为轴的方向是任意的,所以这一步还需要分解为绕x、y、z轴的旋转,也即欧拉角(下图是航天飞机的应用):
给定过原点的旋转轴向量 n \bold{n} n和旋转角度 α \alpha α,利用罗德里格斯旋转公式(Rodrigues’ rotation formula)可以给出旋转矩阵:

右侧的矩阵 N \bold{N} N其实就是叉乘的矩阵形式(见Lec02)
公式的推导可以参考这里
- 把轴平移回原处(即步骤1的反变换)
旋转矩阵不适合作插值。一般利用四元数进行插值运算。
观测变换(Viewing Transformation)
当我们在拍一张照的时候:
- 模特找好位置、摆姿势:模型变换(model transformation)
- 相机找好拍摄位置和角度(view/camera transformation)
- 茄子!(projection transformation)(把三维空间信息投影到二维图像中)
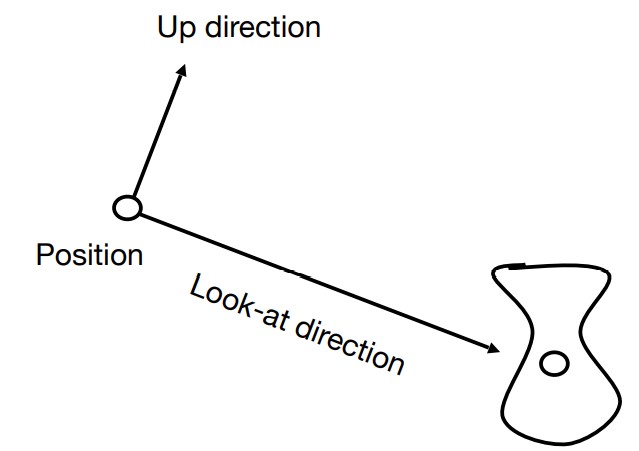
视图/相机变换(view/camera transformation)
要定义相机的状态,我们需要三个参数:
- 相机的位置 e ⃗ \vec{e} e
- 相机看向(gaze)的方向 g ^ \hat{g} g^
- 相机的向上(top)方向 t ^ \hat{t} t^(即相机顶面的向外法向量)
在我们已知相机和物体的状态后,不妨将相机和物体一同变换(保证相对位置不变),使得相机处在一个对后续投影变换处理方便的位置上(这是正是视图变换的目的!!!),即:
位于原点,看向-z轴,向上方向是y轴。
为了实现这个(刚体)变换,我们只需:
-
将 e ⃗ \vec{e} e 平移到原点O
-
将 g ^ \hat{g} g^ 旋转到-z轴、将 t ^ \hat{t} t^ 旋转到y轴、将 g ^ × t ^ \hat{g}\times\hat{t} g^×t^ 旋转到x轴
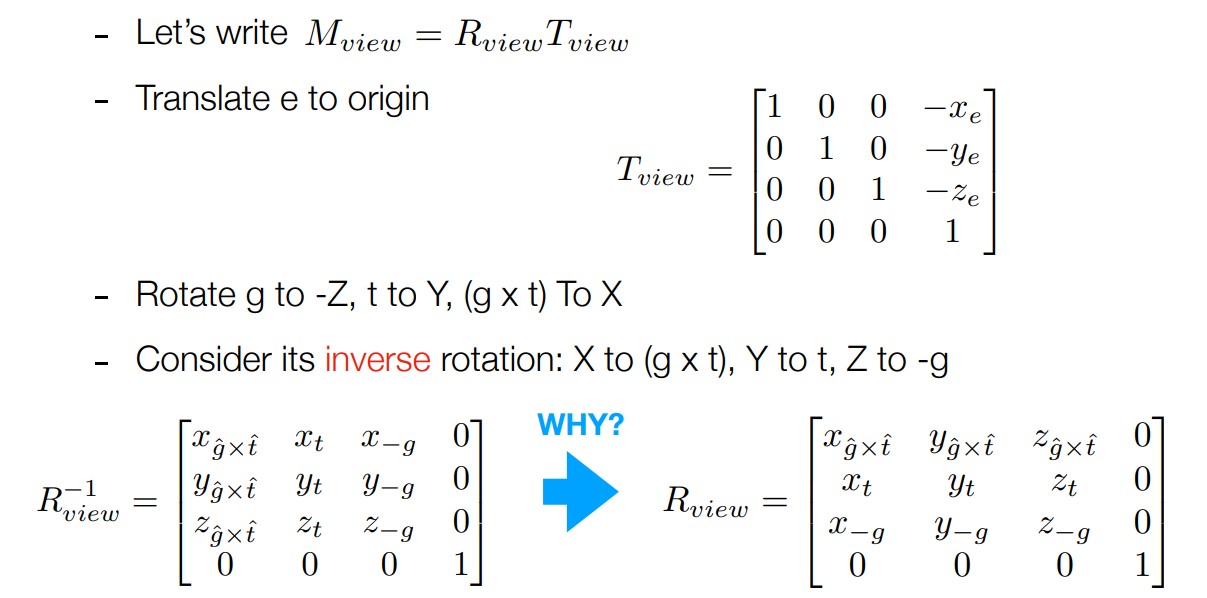
对于旋转矩阵,考虑它的逆矩阵:因为诸如“把x轴旋转到 g ^ × t ^ \hat{g}\times\hat{t} g^×t^ 向量”的操作更容易实现。将 R v i e w − 1 R_{view}^{-1} Rview−1 乘上任意一个坐标轴方向的单位向量,我们就能得到想要的单位向量。而它的逆矩阵恰好是它的转置,这是因为它是一个旋转矩阵,所以具有正交矩阵的性质~
看了看网上的其他博客,还有用欧拉角或者罗德里格斯公式实现世界坐标到相机坐标的转换。不过,我们并不知道如何获取欧拉角的三个维度,以及具体的旋转向量和旋转角。目前看来,本教程的方法是最清晰易懂的。
不过即便如此,我还是有一个问题:相机坐标系本来就是正交的,既然已经把其中两个坐标轴旋转到正确的位置上了,为什么还要旋转第三个坐标轴呢?还是说在旋转第二个坐标轴的时候,会把第一个坐标轴从正确的位置带偏?望大神解答!
投影变换(projection transformation)
正交投影出的图像不体现远近关系,而透视投影则是真实世界的反映。
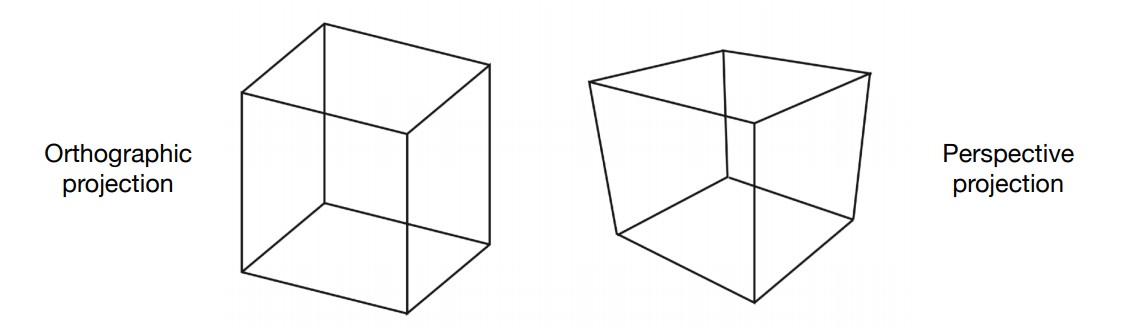
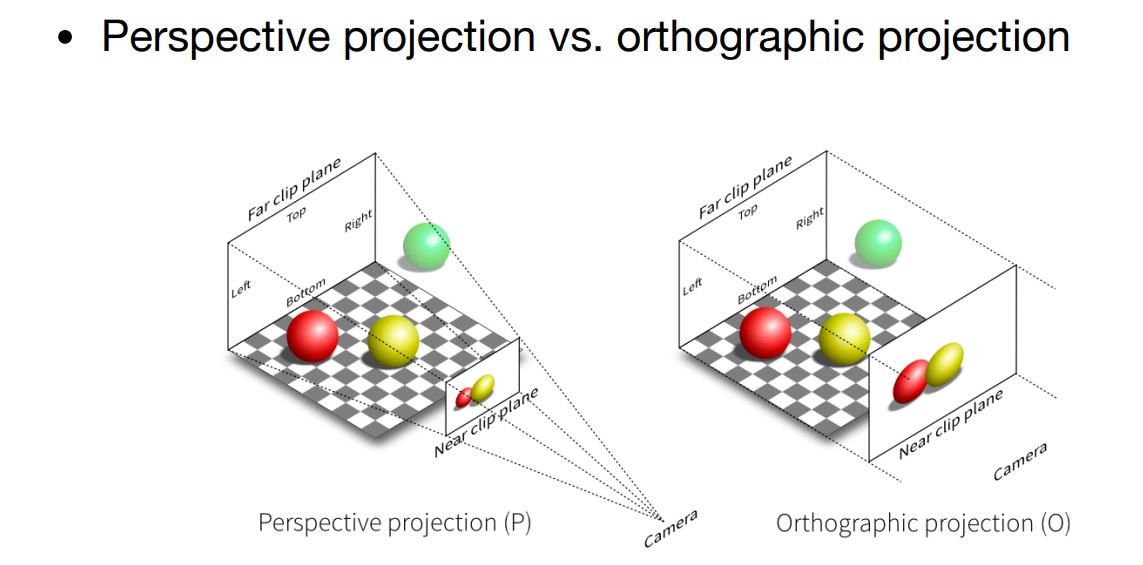
所谓透视,就是从一点发散去看,实现近大远小。试想,在空间中处于同一高度,但离投影平面距离不同的两点,较远的那个点投影到平面上会更低(结合左图想象)。
正交投影(Orthographic Projection)
正交投影很简单,就是丢掉了z轴坐标。步骤如下:
- 选取视角范围:规定一个[l, r], [b, t], [f, n]立方体视角范围(**因为相机是看向-z轴,所以近处的物体反而z坐标更大。**这一结果并不直观,所以OpenGL使用的是左手系)
- 将视角范围缩放到[-1, 1], [-1, 1], [-1, 1]的正则立方体中:
- 将立方体中心移动到原点
- 将立方体缩放为正则立方体
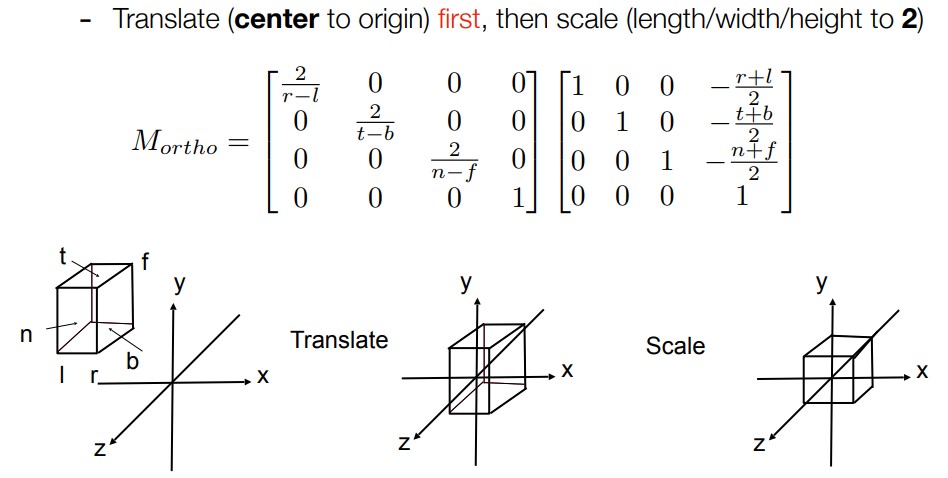
(这里先不考虑z坐标。)
透视投影(Perspective Projection)
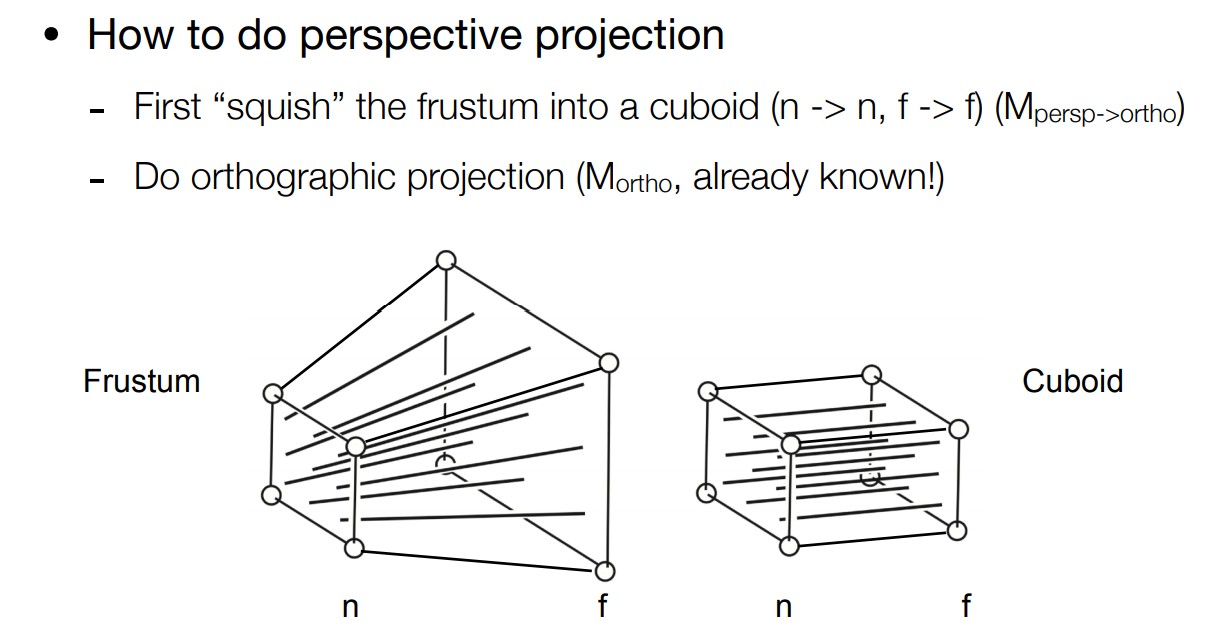
- 步骤一:把棱台压缩成立方体(把透视投影的视角范围缩放至类似正交投影的矩形)。远处的同一高度的点将会被压缩得更低~
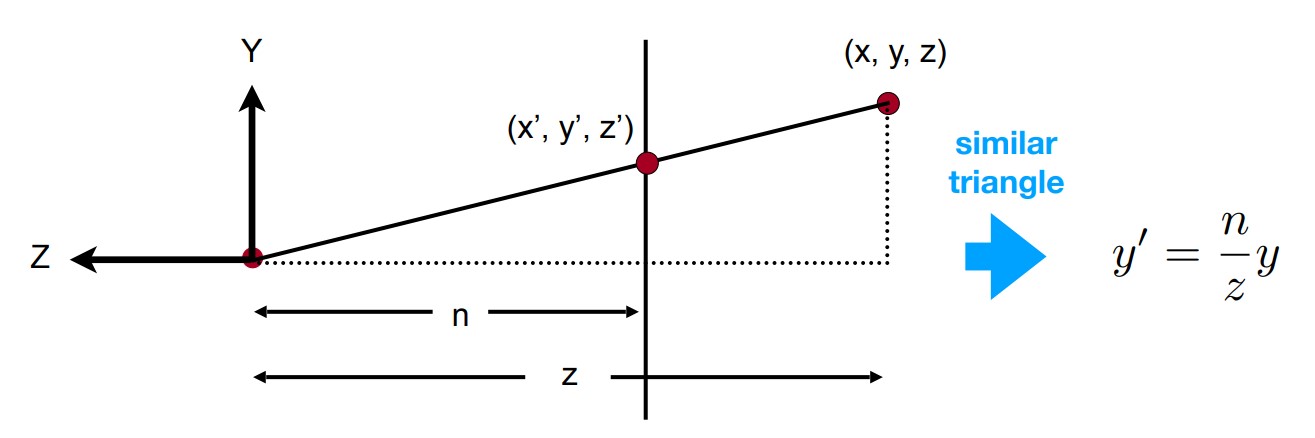
如上图,压缩后,点(x, y, z)变到点(x’, y’, ?). 根据相似三角形关系:
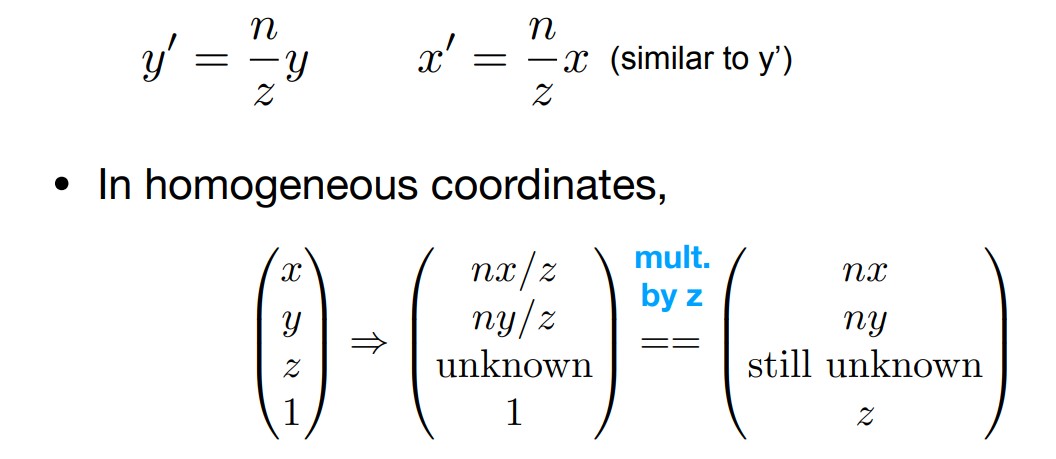
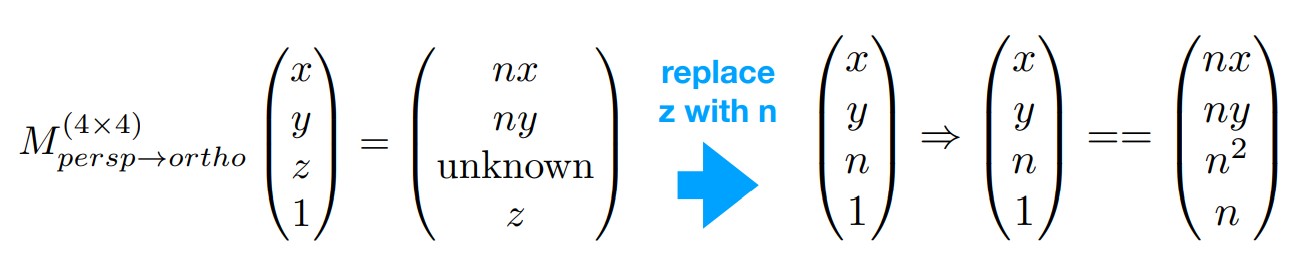
至此,我们已经能写出: M p e r s p → o r t h o = ( n 0 0 0 0 n 0 0 ? ? ? ? 0 0 1 0 ) M_{persp\rightarrow ortho}=\begin{pmatrix}n&0&0&0\\0&n&0&0\\?&?&?&?\\0&0&1&0\end{pmatrix} Mpersp→ortho=⎝⎜⎜⎛n0?00n?000?100?0⎠⎟⎟⎞
那么如何得到第三行的参数?
事实上,我们有以下两个前提:
- 在近平面上的点,其z坐标不会变
- 在远平面上的点,其z坐标不会变
由第一个前提,我们可以得到:
因为
n
2
n^2
n2 和
x
,
y
x,y
x,y 没有关系,所以可以知道
M
p
e
r
s
p
→
o
r
t
h
o
M_{persp\rightarrow ortho}
Mpersp→ortho的第三行肯定是
(
0
,
0
,
A
,
B
)
(0,0,A,B)
(0,0,A,B) 形式,且有
A
n
+
B
=
n
2
An+B=n^2
An+B=n2. 同理,对于远平面的点,有
A
f
+
B
=
f
2
Af+B=f^2
Af+B=f2 。根据这两个方程,我们解得:
A
=
n
+
f
,
B
=
−
n
f
A=n+f,\ B=-nf
A=n+f, B=−nf
于是,我们有:
M
p
e
r
s
p
→
o
r
t
h
o
=
[
n
0
0
0
0
n
0
0
0
0
n
+
f
−
n
f
0
0
1
0
]
M_{persp\rightarrow ortho}=\begin{bmatrix}n&0&0&0\\0&n&0&0\\0&0&n+f&-nf\\0&0&1&0\end{bmatrix}
Mpersp→ortho=⎣⎢⎢⎡n0000n0000n+f100−nf0⎦⎥⎥⎤
- 步骤二:做正交投影(详见上方)
课后思考题
Q:透视投影中z坐标为 ( n + f ) / 2 (n+f)/2 (n+f)/2的点,在经过透视投影变换后,z值如何变化?
A: [ n 0 0 0 0 n 0 0 0 0 n + f − n f 0 0 1 0 ] [ 0 0 n + f 2 1 ] = [ 0 0 n 2 + f 2 n + f 1 ] \begin{bmatrix}n&0&0&0\\0&n&0&0\\0&0&n+f&-nf\\0&0&1&0\end{bmatrix} \begin{bmatrix}0\\0\\\frac{n+f}{2}\\1\end{bmatrix}= \begin{bmatrix}0\\0\\\frac{n^2+f^2}{n+f}\\1\end{bmatrix} ⎣⎢⎢⎡n0000n0000n+f100−nf0⎦⎥⎥⎤⎣⎢⎢⎡002n+f1⎦⎥⎥⎤=⎣⎢⎢⎡00n+fn2+f21⎦⎥⎥⎤
且 n 2 + f 2 n + f − n + f 2 = ( n − f ) 2 2 n + 2 f ≥ 0 \frac{n^2+f^2}{n+f}-\frac{n+f}{2}=\frac{(n-f)^2}{2n+2f}\ge0 n+fn2+f2−2n+f=2n+2f(n−f)2≥0,而近处的z坐标大,所以z值变大即变近。















 247
247











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









