







写在前面
OpenGL中的坐标处理过程包括模型变换、视变换、投影变换、视口变换等内容,这个主题的内容有些多,因此分节学习,主题将分为5节内容来学习。上一节模型变换,本节学习模型变换的下一阶段——视变换。到目前位置,主要在2D下编写程序,学习了视变换后,我们可以看到3D应用的效果了。本节示例程序均可在我的github下载。
通过本节可以了解到
- 视变换的概念
- 索引绘制立方体
- LookAt矩阵的推导(对数学不感兴趣,可以跳过)
- 相机位置随时间改变的应用程序
坐标处理的全局过程(了解,另文详述)
OpenGL中的坐标处理包括模型变换、视变换、投影变换、视口变换等内容,具体过程如下图1所示:
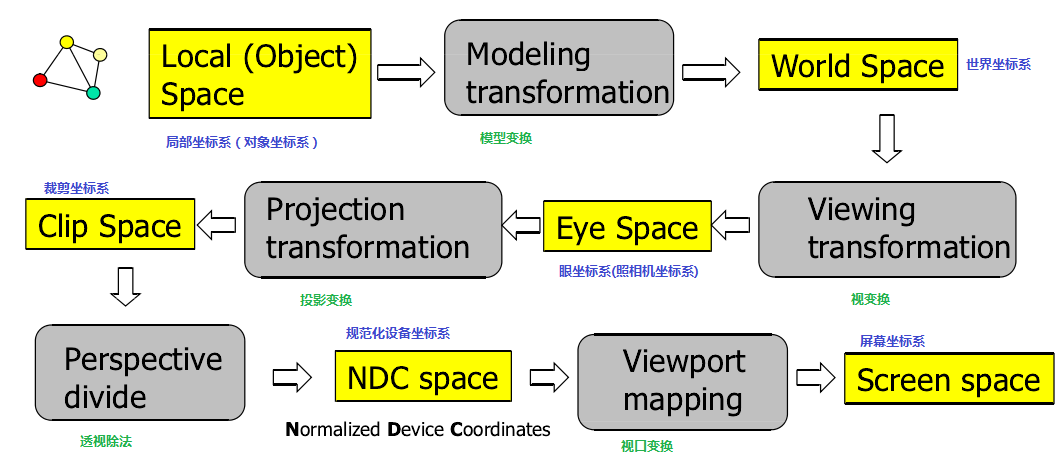
每一个过程处理都有其原因,这些内容计划将会在不同节里分别介绍,最后再整体把握一遍。
今天我们学习第二个阶段——视变换。
并不存在真正的相机
OpenGL成像采用的是虚拟相机模型。在场景中你通过模型变换,将物体放在场景中不同位置后,最终哪些部分需要成像,显示在屏幕上,主要由视变换和后面要介绍的投影变换、视口变换等决定。
其中视变换阶段,通过假想的相机来处理矩阵计算能够方便处理。对于OpenGL来说并不存在真正的相机,所谓的相机坐标空间(camera space 或者eye space)只是为了方便处理,而引入的坐标空间。
在现实生活中,我们通过移动相机来拍照,而在OpenGL中我们通过以相反方式调整物体,让物体以适当方式呈现出来。例如,初始时,相机镜头指向-z轴,要观察-z轴上的一个立方体的右侧面,那么有两种方式:
相机绕着+y轴,旋转+90度,此时相机镜头朝向立方体的右侧面,实现目的。注意这时立方体并没有转动。
相机不动,让立方体绕着+y轴,旋转-90度,此时也能实现同样的目的。注意这时相机没有转动。完成这一旋转的矩阵记作 Ry(−π2)
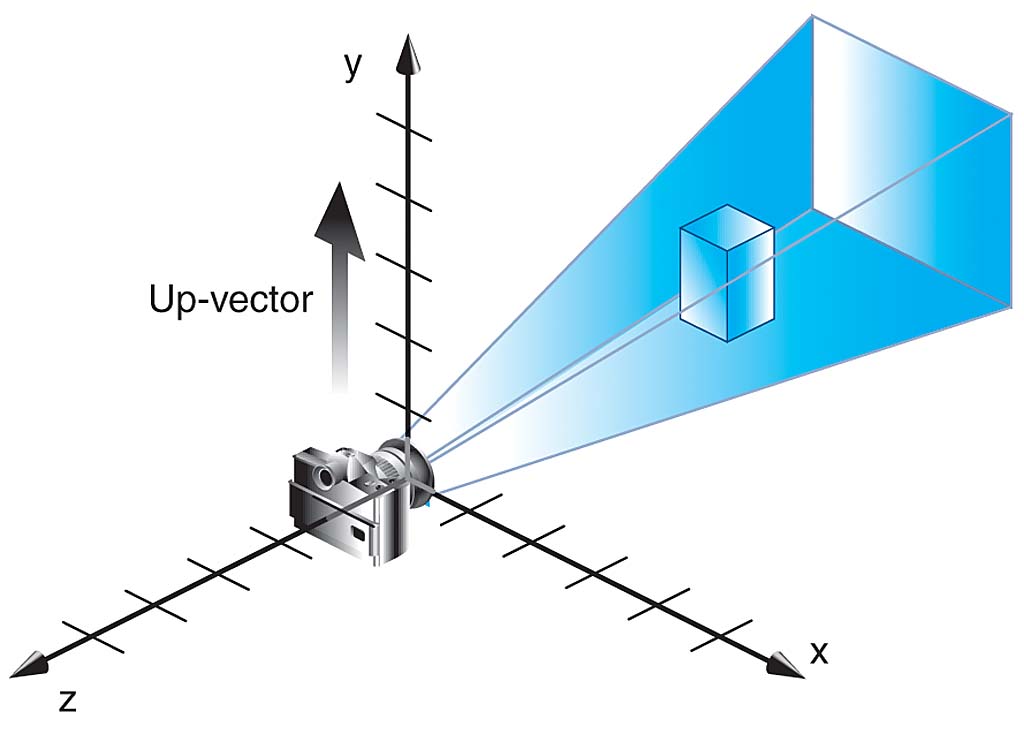
在OpenGL中,采用方式2来完成物体成像的调整。例如下面的图表示了假想的相机:
进一步说明
进一步说明这里相对的概念,对这个概念不感兴趣的可以跳过。默认时相机位于(0,0,0),指向-z轴,相当于调用了:
glm::lookAt(glm::vec(0.0f,0.0f,0.0f),
glm::vec3(0.0f, 0.0f, -1.0f),
glm::vec3(0.0f, 1.0f, 0.0f)),得到是单位矩阵,这是相机的默认情况。
上述第一种方式,相机绕着+y轴旋转90度,相机指向-x轴,则等价于调用变为:
glm::mat4 view =glm::lookAt(glm::vec(0.0f,0.0f,0.0f),
glm::vec3(-1.0f, 0.0f, 0.0f),
glm::vec3(0.0f, 1.0f, 0.0f)),得到的视变换矩阵为:
上述第二种方式,通过立方体绕着+y轴旋转-90度,则得到的矩阵M,相当于:
glm::mat4 model = glm::rotate(glm::mat4(1.0), glm::radians(-90.0f), glm::vec3(0.0, 1.0, 0.0));这里得到的矩阵M和上面的矩阵view是相同的,可以自行验证下。
也就是说,通过旋转相机+y轴90度,和旋转立方体+y轴-90度,最终计算得到的矩阵相同。调整相机来得到观察效果,可以通过相应的方式来调整物体达到相同的效果。在OpenGL中并不存在真正的相机,这只是一个虚构的概念。
视变换矩阵的推导(了解,对数学不感兴趣可跳过)
相机坐标系由相机位置eye和UVN基向量(或者说由forward, side ,up)构成,如下图所示:
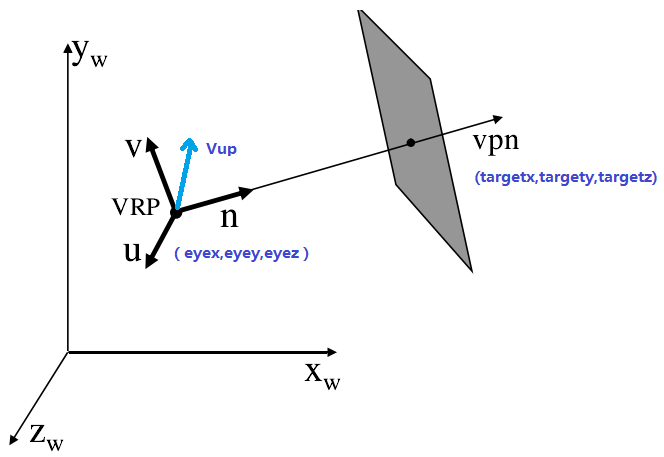
各个参数的含义如下:
- 相机位置 也称为观察参考点 (View Reference Point) 在世界坐标系下指定相机的位置eye。
- 相机镜头方向,由相机位置和相机指向的目标(target)位置计算出, forwrad=(target−eye) 。
- 相机顶部正朝向: View Up Vector 确定在相机哪个方向是向上的,一般取(0, 1, 0)。这个参数稍后详细解释。
上面的图简化为:
在使用过程中,我们是要指定的参数即为相机位置(eye),相机指向的目标位置(target)和viewUp vector三个参数。
Step1 : 首选计算相机镜头方向 forwrad=(target−eye) ,
进行标准化 forward=forward∥forwrad∥ 。
Step2: 根据view-up vector和forward确定相机的side向量:
viewUp′=viewUp∥viewUp∥
side=cross(forward,viewUp′)
Step3 : 根据forward和side计算up向量:
up=cross(side,forward)
这样eye位置,以及forward、side、up三个基向量构成一个新的坐标系,注意这个坐标系是一个左手坐标系,因此在实际使用中,需要对forward进行一个翻转,利用-forward、side、up和eye来构成一个右手坐标系。
我们的目标是计算世界坐标系中的物体在相机坐标系下的坐标,也就是从相机的角度来解释物体的坐标。从一个坐标系的坐标变换到另一个坐标系,这就是不同坐标系间坐标转换的过程。
计算方法1——直接计算变换矩阵
从坐标和变换一节,了解到,要实现不同坐标系之间的坐标转换,需要求取一个变换矩阵。而这个矩阵就是一个坐标系A中的原点和基在另一个坐标系B下的表示。
我们将相机坐标系的原点和基,使用世界坐标系表示为(s代表side基向量,u代表up基向量,f代表forward基向量):
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 282
282











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









