






Sin型加速度,输入加减速时间和匀速时间,得到每个时间点的位置Factor
这个版本设计的加速度和减速度是一样的,所以只使用了maxAccel和maxSpeed
Codesys代码
FUNCTION_BLOCK SinAccelProfile
VAR_INPUT
accelTime : LREAL;
constTime : LREAL;
decelTimePoint : LREAL;
totalTime : LREAL;
totalFactor : LREAL;
END_VAR
VAR_OUTPUT
END_VAR
VAR
END_VAR
//----------------------------------------------
METHOD getDistanceFactor : LREAL
VAR_INPUT
t : LREAL;
END_VAR
VAR
d : LREAL;
tf : LREAL;
END_VAR
IF t < 0.0 THEN
d := 0.0;
ELSIF t<=accelTime THEN
tf := (t*Math.PI)/accelTime;
d := tf - SIN(tf);
ELSIF t<=decelTimePoint THEN
tf := (t-accelTime)/accelTime;
d := Math.PI + 2*Math.PI*tf;
ELSIF t<=totalTime THEN
tf := (Math.PI*(t-decelTimePoint))/accelTime;
d := totalFactor - Math.PI + (tf - SIN(Math.PI+tf));
ELSE
getDistanceFactor := 1.0;
RETURN;
END_IF
getDistanceFactor := d/totalFactor;
//-----------------------------------------
METHOD initByDynamic
VAR_INPUT
length : LREAL;
maxAccel : LREAL;
maxSpeed : LREAL;
minAccelTime : LREAL;
END_VAR
VAR
nominalAccel : LREAL;
minTime : LREAL;
minLen : LREAL;
constLen : LREAL;
accelDist : LREAL;
END_VAR
nominalAccel := maxAccel/(0.5*Math.PI);
minTime := 2.0*maxSpeed/nominalAccel;
minLen := minTime*0.5*maxSpeed;
IF length > minLen THEN
constLen :=length - minLen;
ELSE
constLen := 0;
END_IF
constTime := constLen/maxSpeed;
accelDist := 0.5*(length-constLen);
accelTime := SQRT(Math.PI*accelDist/maxAccel);
update(minAccelTime);
//----------------------------------------
METHOD initByTime
VAR_INPUT
accelTime : LREAL;
constTime : LREAL;
END_VAR
THIS^.accelTime := accelTime;
THIS^.constTime := constTime;
update(0.01);
//-----------------------------------------
METHOD update
VAR_INPUT
minAccelTime : LREAL;
END_VAR
accelTime := MAX(accelTime,minAccelTime);
decelTimePoint := accelTime + constTime;
totalTime := accelTime +constTime + accelTime;
totalFactor := 2.0*Math.PI + 2.0*Math.PI*constTime/accelTime;
Matlab验证代码
clear all;
maxSpeed=1000;
maxAccel=5000;
minAccelTime=0.1;
length=500;
nominalAccel = maxAccel/(0.5*pi);
minTime = 2.0*maxSpeed/nominalAccel;
minLen = minTime*0.5*maxSpeed;
if length > minLen
constLen = length - minLen;
constTime = constLen/maxSpeed;
accelDist = 0.5*(length - constLen);
else
constLen=0;
constTime=0;
accelDist = 0.5*(length - constLen);
endif
accelTime = sqrt(pi*accelDist/maxAccel);
accelTime = max(accelTime,minAccelTime);
%accelTime = 0.1;
%constTime = 0.1;
decelTimePoint = accelTime + constTime;
totalTime = accelTime + constTime + accelTime;
totalFactor = 2.0*pi + 2.0*pi*constTime/accelTime;
accelTime
constTime
tArray = [];
distArray = [];
dt = 0.005;
t = 0;
while(true)
if t<0.0
d = 0;
elseif t<=accelTime
tf = t*pi/accelTime;
d = tf - sin(tf);
elseif t<=decelTimePoint
tf = (t-accelTime)/accelTime;
d = pi + 2*pi*tf;
elseif t<=totalTime
tf = pi*(t-decelTimePoint)/accelTime;
d = totalFactor - pi + (tf-sin(pi+tf));
else
d = totalFactor;
endif
df = d/totalFactor;
tArray = [tArray t];
distArray = [distArray df];
if(t > totalTime)
break;
endif
t = t + dt;
endwhile
velArray = [0 diff(distArray)];
accArray = [0 diff(velArray)];
%close all
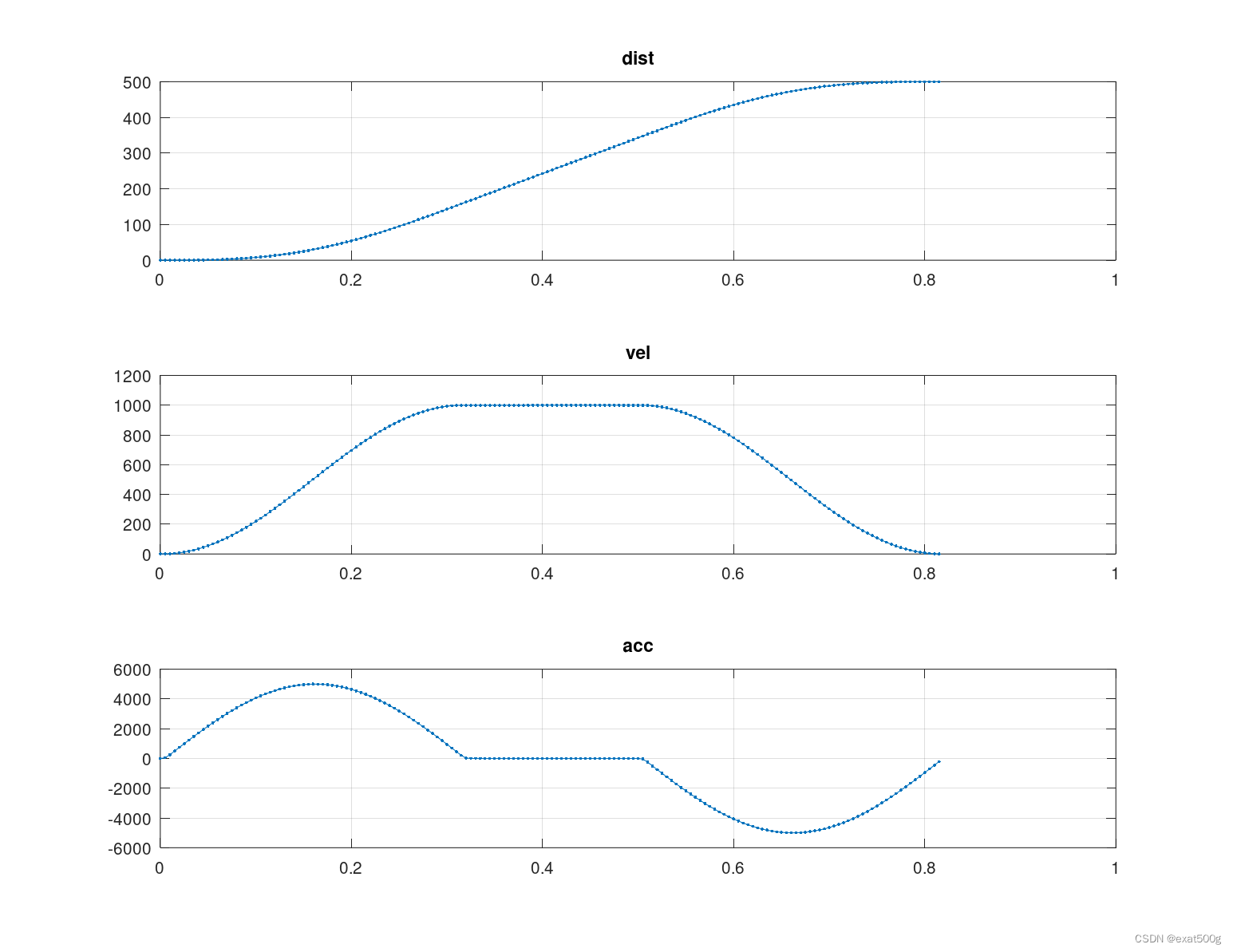
subplot(3,1,1);
plot(tArray,distArray*length,'.-');
title('dist');
grid on;
subplot(3,1,2);
plot(tArray,velArray*length/dt,'.-');
title('vel');
grid on;
subplot(3,1,3);
plot(tArray,accArray*length/(dt*dt),'.-');
title('acc');
grid on;
Matlab结果














 5612
5612











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









