







作者:刘洪涛,华清远见嵌入式培训中心高级讲师,ARM ATC授权培训讲师。
最近计划针对我们华清远见的教学开发一套PXA270系统,我把我的一些软、硬件开发过程记录下来和大家一起分享、讨论。有好的建议大家一定要及时交流,lht@farsight.com.cn
平台硬件功能要求:32M/64M nor flash、64M sdram、10M/100M自适应网口、串口、SD卡接口、USB主从口、实时时钟、4*4扫描键盘、I2C的e2rom、蜂鸣器、A/D、CAN总线接口、VGA接口、数字液晶接口、音频接口、电源管理等功能。
平台嵌入式操作系统要求:
1、linux:版本2.6.23 并可以运行google的android手机操作系统
2、Wince:6.0
电路板开发工具:capture CIS+Allegro
下面就开始我们的项目了。做硬件设计,首先考虑的是电源设计,所以今天讨论的主题就是PXA270电源电路设计。
Intel Xscale PXA270处理器是一个高度集成的SOC,并且针对电池供电的手持设备如PDA、3G手机等的应用做了优化,是希望以较低的功耗完成计算和多媒体应用的产品的理想选择。 它集成了丰富的“ 片内外设”,并专为无线应用包含了Intel最新的移动计算技术。主频在13~624 MHz内调节,为大多数移动应用提供足够的性能。
系统中这些包括音频功放、USB、LCD、MMC卡等不同的应用模块都要求不同功率级别的稳压源。电源管理指如何将电源有效分配给系统的不同组件,即负责整机的电源供给及供电管理调度。
PXA270的电源管理部分比较复杂。这里先讨论和硬件设计相关部分。
一、PXA270的电压需求及电流需求
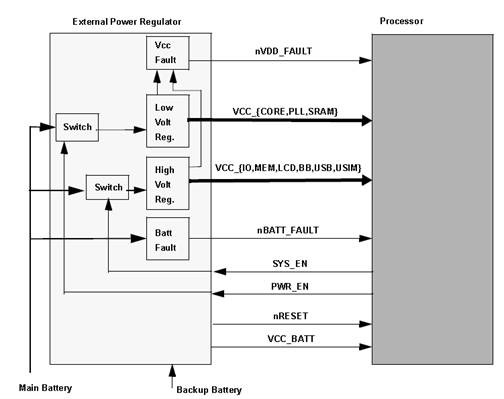
图1.1 典型电源电路
可以看出处理器需要外部提供的低电压有VCC_(CORE,PLL,SRAM),高电压有VCC_(IO、MEM、LCD、BB、USB、USIM)。并且外部电源管理芯片还提供了nVDD_FAULT和nBATT_FALT信号(这两个信号主要用于向处理器报告电源异常),而且可以接受处理器发出的SYS_EN和PWR_EN信号(这两个信号主要用于控制电源管理芯片的电压输出,以达到在睡眠模式下节电的目的)。
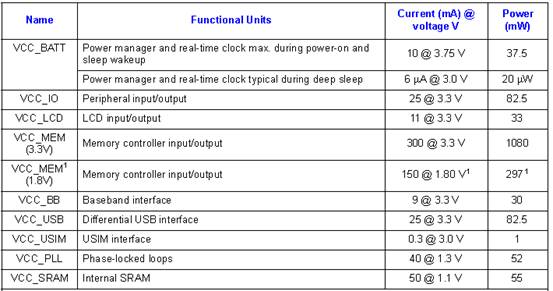
表1.1 电压需求

本系统中VCC_BB和VCC_USIM不用,其它电压确定为:
| VCC_BATT | 3.0V |
| VCC_IO | 3.3V |
| VCC_LCD | 3.3V |
| VCC_MEM | 3.3V |
| VCC_USB | 3.3V |
| VCC_SRAM | 1.1V |
| VCC_CORE | 0.8—1.45V |
| VCC_PLL | 1.3V |
表1.2 VCC_CORE电流需求
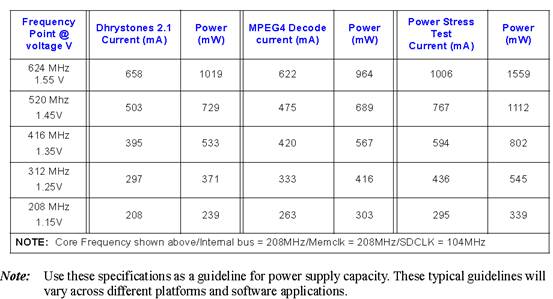
VCC_CORE 的电流受平台硬件配置和所运行的系统软件和应用的影响比较大,且和设定的工作频率相关。我们的平台要求最大可以运行在520M左右,那VCC_CORE要求至少可以提供1.45V及689mA左右的电流。
表1.3 其它电流需求
二、选择合适的电源管理芯片
从上面的要求可以看到PXA270需要多种电压,而且最好能够匹配它的电源管理功能。电源芯片选择方案上来看主要有两种:1、分立元件 2、集成度高的电源管理芯片。
分立元件 指每个电压都单独特定的一个芯片来提供,优点是设计简单、价格也相对便宜;缺点是集成度低,占用pcb面积大、不易管理控制。
专用的电源管理芯片 指一个芯片可以提供PXA270所需的多路电压,并且提供管理功能,如:电压的动态调节,电压监测、开关控制等;缺点:性能复杂一些,设计难度稍大、价格也相对高一些,还有有些芯片在市场上不太好买。
经过比较,最终还是决定使用电源管理芯片(做嵌入式嘛,就是要不怕困难的精神,何况还有参考电路呢)。
目前,我知道的在PXA270上使用的比较成熟的电源管理芯片有两款,TI的tps65020和美信的MAX1856CETM。这两款芯片和PXA270连接的参考原理图手头上都有,价格差别也不大。最终选择了MAX1856CETM,主要还是考虑我有它的Allegro封装(有的时候理由就是这么简单)。
还有个问题,MAX1856CETM和tps65020目前北京都没货,得从深圳拿。目前还是选MAX1856CETM吧,毕竟有的开发板上用的就是它。如果最后实在不好拿货,再换别的方案。
MAX1856有AETM、BETM、CETM,3个功能、封装兼容的芯片。只是MAX1856CETM输出的电流最大。有个朋友用的是MAX1856A(这个要好买些),但说有时比较容易烧。参照表1.4及表1.2和表1.3,可以分析出之所以MAX1856A容易烧,是因为VCC_CORE 需求的电流很容易就超出MAX1586A所能提供的500mA。所以选择MAX1856C。
表1.4

关于MAX1586电源的功率还可以参考下面几个图:

可见VCC_IO是满足的。 VCC_PLL VCC_SRAM的功率差不多,我想既然开发能正常用,所以这几个电压应该也是满足的。
三、MAX1856CETM的接线及功能分析
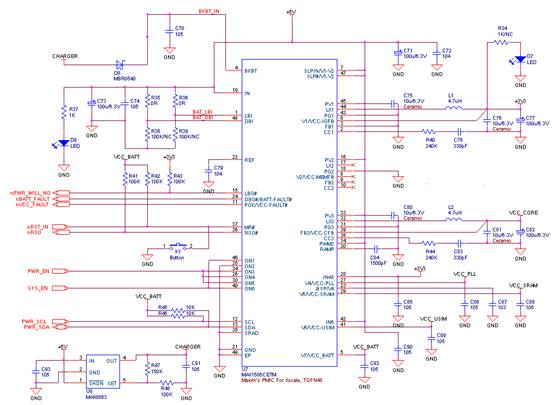
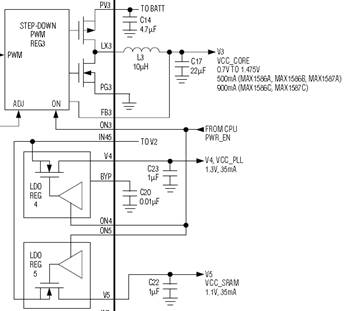
图1.2 MAX1856CETM和PXA270接线图
对本系统而言,由于采用的是外接电源的方式,所以不考虑电池充放电路的管理。图1.2是接线图,采用的是优龙开发板提供的参考图。由图可见,MAX1856C提供PXA270所需要的所有电压,图中:
VCC_CORE: 0.7----1.475V V,复位时1.3V
VCC_PLL:1.3V
VCC_SRAM:1.1V
VCC_BATT:3.0V
BTBT_IN:3.0V
需要注意的是BKBT_IN一定要有,不然系统启动不了。不接它的话jtag一复位系统的3.3V就会丢失,jtag连接就会断掉(这是一个朋友的经验,目前没分析出来原因)。
PWR_EN: 可以控制电压输出3、4、5的开关
SYS_EN: 可以控制电压输出1、6的开关
VCC_BAT: 不受控制,一直有
PWR_SCL和PWR_SDA:I2C输入口,可以用来控制VCC_CORE的电压(0.7—1.475V)
电源管理部分就到这了,后面要考虑“时钟部分”的设计了。















 1611
1611

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









