







根据飞控盒的型号,找到相对应的串口信息,我的飞控盒型号:Nora+,故串口映射信息: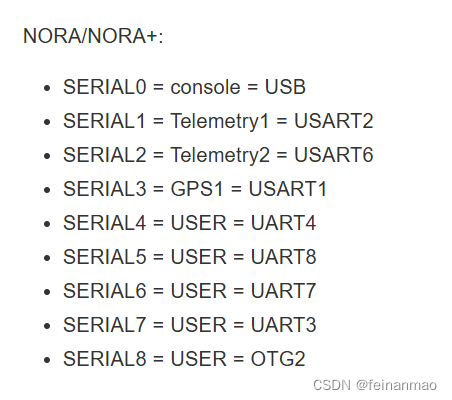
以上信息在CUAV官方文档中查询:CUAV 官方文档 · CUAV 官方文档
查询完后可以在参考APM源码文档中关于UART串口相关部分的介绍,并根据文档提供的例程学习相关接口:UARTs and the Console — Dev documentation (ardupilot.org)
例程可以单独烧录测试串口能否正常使用:
./waf build --target examples/UART_test --upload
该例程相关代码:
/*
simple test of UART interfaces
*/
#include <AP_HAL/AP_HAL.h>
#include <stdio.h>
void setup();
void loop();
const AP_HAL::HAL& hal = AP_HAL::get_HAL();
/*
setup one UART at 57600
*/
static void setup_uart(AP_HAL::UARTDriver *uart, const char *name)
{
if (uart == nullptr) {
// that UART doesn't exist on this platform
return;
}
uart->begin(57600);
}
void setup(void)
{
/*
start all UARTs at 57600 with default buffer sizes
*/
hal.scheduler->delay(1000); //Ensure that hal.serial(n) can be initialized
setup_uart(hal.serial(7), "SERIAL7"); // console
setup_uart(hal.serial(1), "SERIAL1"); // telemetry 1
setup_uart(hal.serial(2), "SERIAL2"); // telemetry 2
setup_uart(hal.serial(3), "SERIAL3"); // 1st GPS
setup_uart(hal.serial(4), "SERIAL4"); // 2nd GPS
}
static void test_uart(AP_HAL::UARTDriver *uart, const char *name)
{
if (uart == nullptr) {
// that UART doesn't exist on this platform
return;
}
uart->printf("Hello on UART %s at %.3f seconds\n",
name, (double)(AP_HAL::millis() * 0.001f));
}
void loop(void)
{
test_uart(hal.serial(1), "SERIAL1");
test_uart(hal.serial(2), "SERIAL2");
test_uart(hal.serial(3), "SERIAL3");
test_uart(hal.serial(4), "SERIAL4");
// also do a raw printf() on some platforms, which prints to the
// debug console
::printf("Hello on debug console at %.3f seconds\n", (double)(AP_HAL::millis() * 0.001f));
hal.scheduler->delay(1000);
}
AP_HAL_MAIN();
后面发现,在初始化时Copter的初始化函数已经将相关串口波特率初始化完毕,若要调用串口无需再次uart->begin(57600)
注意:
烧录完例程可能将飞控连接电脑的端口占用,导致后续无法再次烧录,只能通过地面站进行烧录固件,详细步骤参考CUAV官方文档:ArduPilot固件使用指南 · cuav x7
将例子烧录完成后,则只需要调用接口:
hal.serial(i) ->printf();
hal.serial(i)->write();
hal.serila(i)->read();
既可以实现串口的使用,关于printf()、write()、read()具体使用可转到定义进行查看,有多种重载方法支持多种数据格式
注意:
若使用例程进行测试时候串口能正常使用,但烧录源码串口无法正常发送与接收消息,有可能是串口设置并没有赋值,在地面站或APM源码中可以查看:
地面站查看:
连接飞控后在配置/调试的全部参数表中搜索Serial(i),查看是否被赋值为-1,被赋值为-1时无法正常调用,修改赋值即可正常调用串口
APM中查看:
APM可在/ardupilot/libraries/AP_SerialManager/AP_SerialManager.h中的enum SerialProtocol中查看每个值所代表的功能:
enum SerialProtocol {
SerialProtocol_None = -1,
SerialProtocol_Console = 0, // unused
SerialProtocol_MAVLink = 1,
SerialProtocol_MAVLink2 = 2, // do not use - use MAVLink and provide instance of 1
SerialProtocol_FrSky_D = 3, // FrSky D protocol (D-receivers)
SerialProtocol_FrSky_SPort = 4, // FrSky SPort protocol (X-receivers)
SerialProtocol_GPS = 5,
SerialProtocol_GPS2 = 6, // do not use - use GPS and provide instance of 1
SerialProtocol_AlexMos = 7,
SerialProtocol_Gimbal = 8, // SToRM32, Siyi custom serial protocols
SerialProtocol_Rangefinder = 9,
SerialProtocol_FrSky_SPort_Passthrough = 10, // FrSky SPort Passthrough (OpenTX) protocol (X-receivers)
SerialProtocol_Lidar360 = 11, // Lightware SF40C, TeraRanger Tower or RPLidarA2
SerialProtocol_Aerotenna_USD1 = 12, // USD1 support - deprecated, users should use Rangefinder
SerialProtocol_Beacon = 13,
SerialProtocol_Volz = 14, // Volz servo protocol
SerialProtocol_Sbus1 = 15,
SerialProtocol_ESCTelemetry = 16,
SerialProtocol_Devo_Telem = 17,
SerialProtocol_OpticalFlow = 18,
SerialProtocol_Robotis = 19,
SerialProtocol_NMEAOutput = 20,
SerialProtocol_WindVane = 21,
SerialProtocol_SLCAN = 22,
SerialProtocol_RCIN = 23,
SerialProtocol_EFI = 24, // EFI serial protocol
SerialProtocol_LTM_Telem = 25,
SerialProtocol_RunCam = 26,
SerialProtocol_Hott = 27,
SerialProtocol_Scripting = 28,
SerialProtocol_CRSF = 29,
SerialProtocol_Generator = 30,
SerialProtocol_Winch = 31,
SerialProtocol_MSP = 32,
SerialProtocol_DJI_FPV = 33,
SerialProtocol_AirSpeed = 34,
SerialProtocol_ADSB = 35,
SerialProtocol_AHRS = 36,
SerialProtocol_SmartAudio = 37,
SerialProtocol_FETtecOneWire = 38,
SerialProtocol_Torqeedo = 39,
SerialProtocol_AIS = 40,
SerialProtocol_CoDevESC = 41,
SerialProtocol_MSP_DisplayPort = 42,
SerialProtocol_MAVLinkHL = 43,
SerialProtocol_Tramp = 44,
SerialProtocol_DDS_XRCE = 45,
SerialProtocol_IMUOUT = 46,
// Reserving Serial Protocol 47 for SerialProtocol_IQ
SerialProtocol_PPP = 48,
SerialProtocol_NumProtocols // must be the last value
};
给串口赋值后,串口即可正常调用。

















 1585
1585

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









