









CG2017 PA5-2 FruitNinja(水果忍者)· 下
2. 思路分析
2.3 Linear Programming
根据上一节的思路,我们只需要在对偶空间里面求解Half-plane Intersection即可,但是我们需要注意一下题目所需要求解的问题:题目需要我们求解是否有解,而不是整个空间解集。也就说我们可以把求解整个空间解集转换成求其中一个解,只要有一个解,我们就能回答题目有没有的问题,也能简化求解的复杂度。
因为原先我们是求解空间平面,现在我们只是求解一个点,大大降低算法难度。依据这个思路,我们直接使用教材上面的Linear Programming(LP)就可以解决问题。这个方法非常的直接,这里使用教材上面的图例1简要说明一下,大家就能看图理解啦哒:
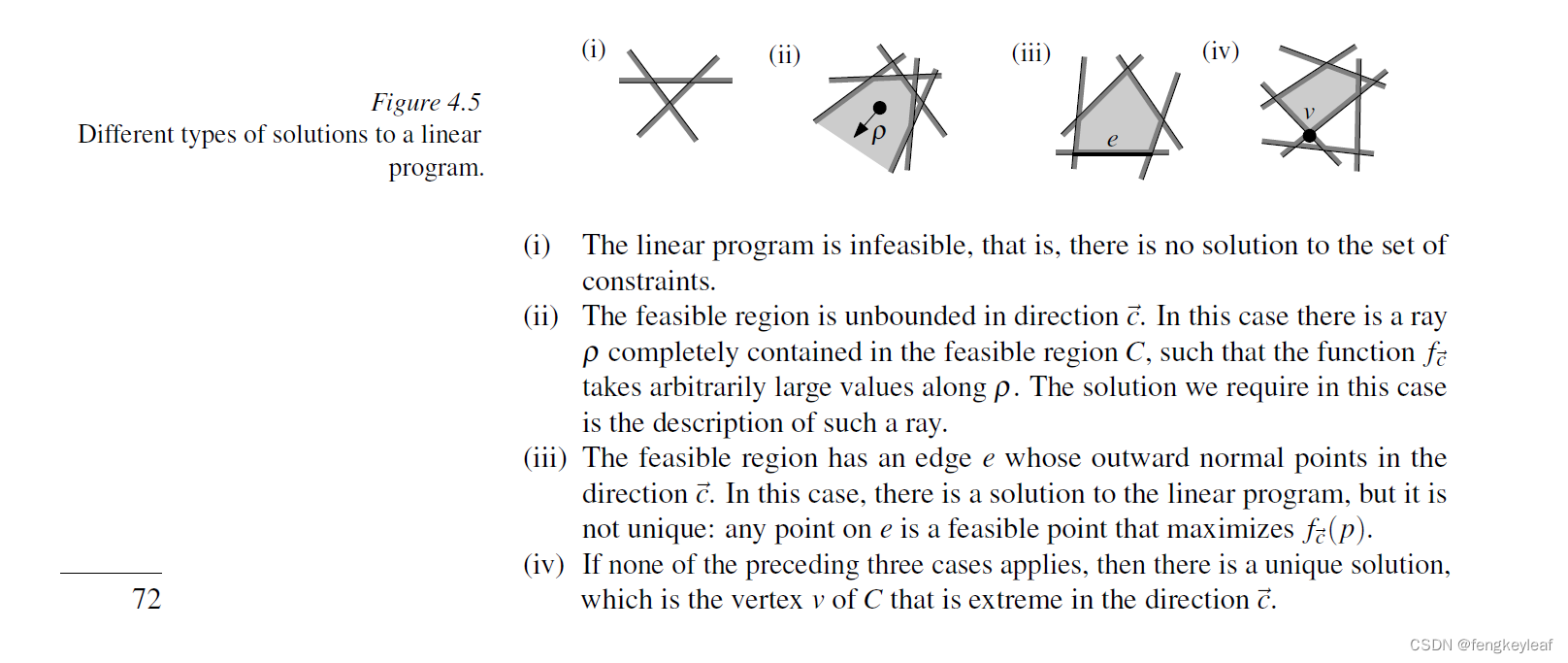
但是这个方法有较高的数学浓度!Linear Programming具体有两种求解方法:1)有界LP 或 2)无界LP;前者需要根据实际问题确定角点,后者需要先判断一个矢量→d,判别方法教材中有涉及,但笔者数学功力不太行,实在无法理解,所以也无法实现这个解法。但是这个方法是本题的最优解,根据教材上面的定理:
〖定理4.10〗1
即使是在最坏情况下,使用不超过线性规模的空间,也可以在O(n)的随机期望运行时间内,对包含n 个约束条件的任何二维线性规划问题进行求解。
我们可以得到这个方法的时间和空间复杂度都为O( 2n ),因为最多有2n个端点,也即有线性数量的半平面,所以这个解法为理论上的最快算法。因为没有实现,所以这里笔者把实现细节的分享放在后一种方法,直接求解整个解集空间:Half-plane Intersection。如有童鞋成功实现这个方法,请务必联系我拜膜一下哇~
2.4 Half-plane Intersection
2.4.1 整体思路
Half-plane Intersection算法是基于 Map Overlay,所以在阅读下面内容之前,大家需要理解Map Overla算法。Half-plane Intersection算法非常的直接,使用的是Divide-and-Conquer(分治)进行计算,每次递归返回时,我们需要使用MapOverlay来计算半平面的交集(这个交集必为Covexll),但这个交集和之前的MapOverlay不太一样,这里的交集结果可能是平面,线段,或者是点。
而且实现起来最为棘手的问题是,半平面理论上是一个无限大的平面,而MapOverlay处理的是有限的平面。笔者尝试直接使用半平面来求解,但实在是太复杂,最后遂放弃。之后只能祭出计算几何里面的一个”大杀器“:无限化有限,即我们最开始用一个Bounding box把所有半平面转换成有限的平面,然后再用MapOverlay进行求解即可:
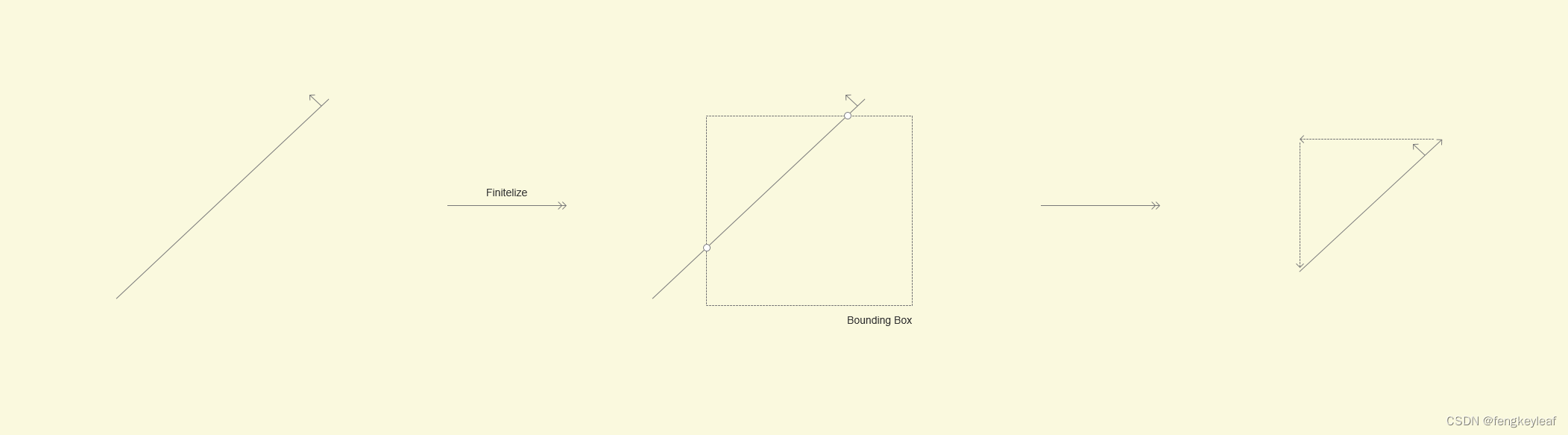
和CG2017 PA1-2 Crossroad (十字路口)处理思路类似,但是这样也会遇到一个相同的问题:我们怎么选定一个足够大的 Bounding Box 能覆盖所有的半平面的相交区域呢?笔者想了半天只能先找出所有半平面的交点,然后用一个能覆盖所有交点的 Box 来进行计算,但是这样又会有一个问题:我们如何在O( nlogn )时间内求得相当于n条直线的交点呢?而且这个方法还不能覆盖没有交点的情况,即所有半平面所在的直线都是平行的。所以这个问题也是一个实际实现之中遇到的难度,最后的解决方法是用一个数值很大的 Box 来进行求解,虽然能满足题目上面的数据集,但在理论上还是有缺陷。如果大家对此有比较好的思路,欢迎讨论哒~
解决了半平面的无限化问题,接下来就是如何进行求交计算了。总的来说,笔者总结了Haff-plane Intersection之中所涉及的相交情况,因为相交结果只有四种:有限平面,线段,点,空集。那么我们需要考虑的相交情况,就是上述四种结果的排列组合。这里我们简要说明一下每种情况的求解方法:
- 点 & 点:只需要判断两个点是否重合,重合则有解,且解为点;如果不重合,则解为空;
- 点 & 线段:只需判断点是否在线段上面,在则解为点;如果不在,则解为空;
- 点 & 面:只需判断点是否在面之中(或边界上),在则解为点;如果不在,则解为空;
- 线段 & 线段:线段稍微复杂一些,解可能为点,线段;
- 线段 & 面:同样解可能为点,线段;
- 面 & 面:使用MapOverlay求解即可,再查看两个平面是否有相交的面,有则输出该面,如果相交于一点,则解为点,如果相交为线段,则解为线段;
- 空集 & ( 点 | 线段 | 面 | 空集 ) :只要有一个为空,结果必为空集;
有限平面相交,笔者在MapOverlay里面已经进行过详细介绍,这里就不再赘述,所以我们把重点放在4)和 5)上面,而且两者有相似的地方。
2.4.2 线段和面的相交
首先,我们先来看看线段 & 线段求交结果的所有情况:(注意这里不是一般的线段求交,解可能为线段)
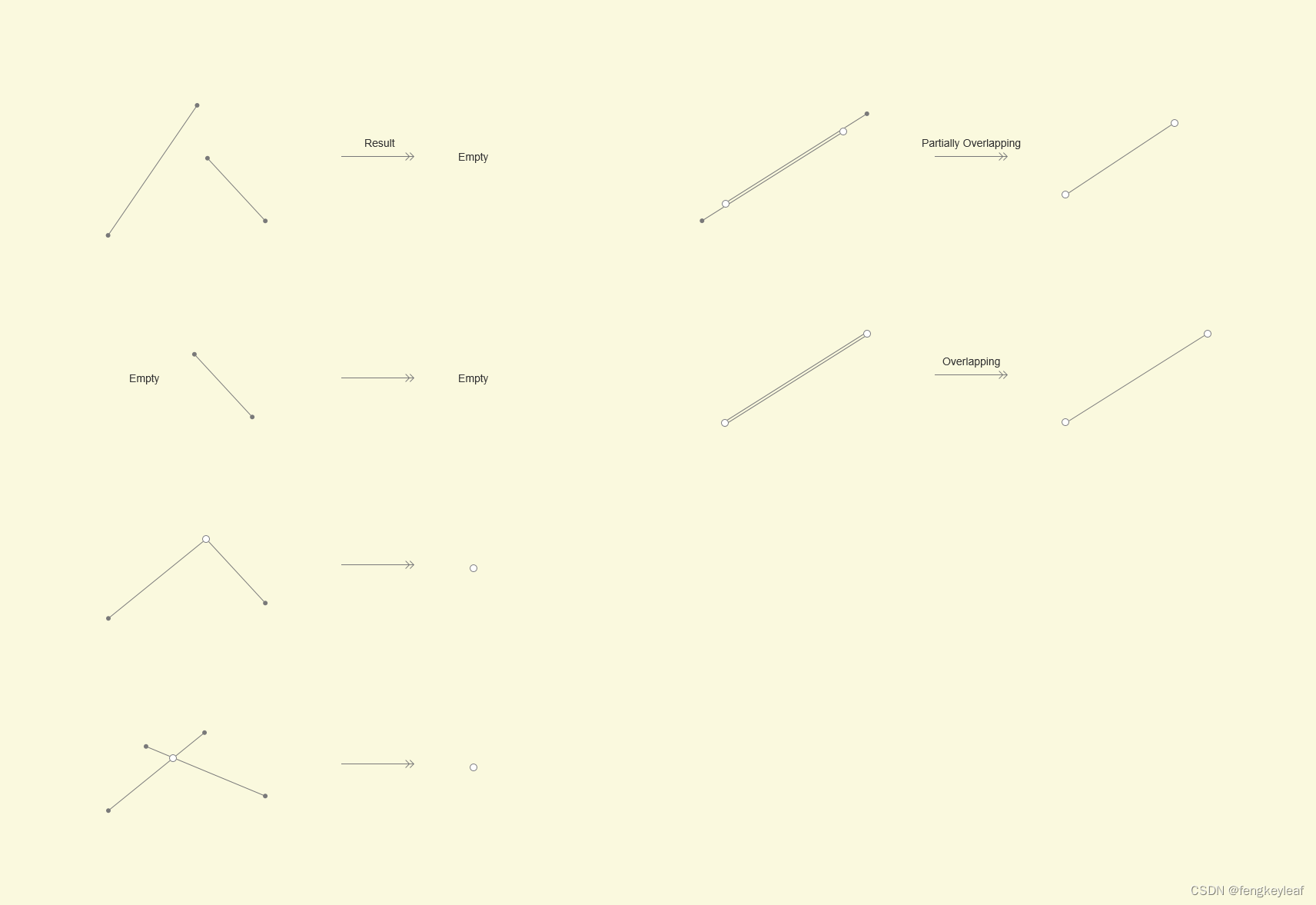
我们可以观察到,两条线段1)如果没有交点,则解为空;2)如果有一个交点,则解为交点;3)如果有两个交点,则解为两个交点组成的线段。通过这个观察,我们可以使用Segment Intersection算法进行求解,根据交点的数目来求得具体的解。但是,这里用到的Segment Intersection算法需要报告重合线段的交点,但之前一般意义上来说,这种不算相交,但这里需要报告出来,需要大家注意。
接下来,我们来看看线段和面相交的所有情况:
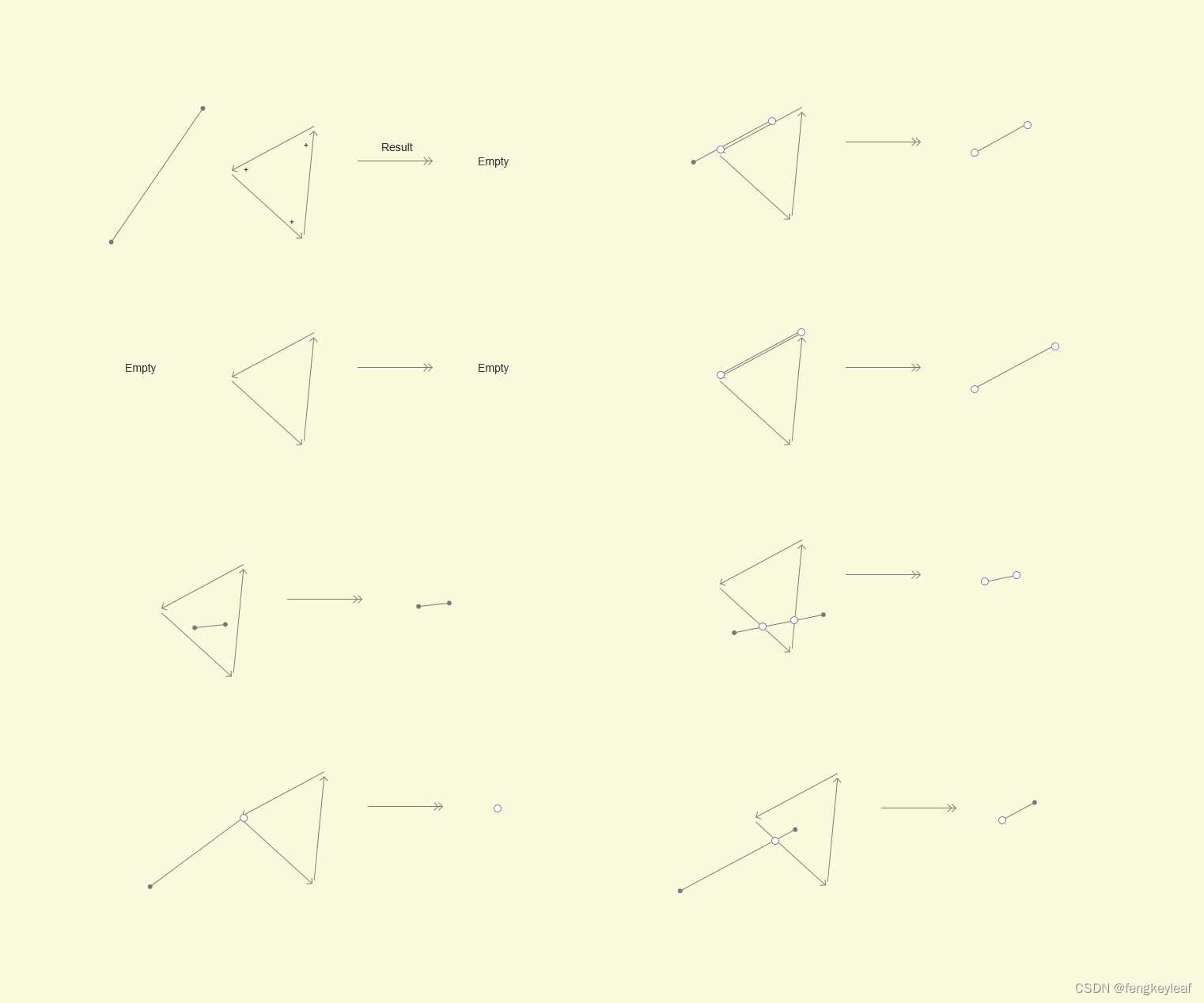
和线段 & 线段类似,我们还是先通过交点的数目来进行判断,但情况会复杂很多:
- 如果没有交点,且两个端点都不在平面内,则解为空;但如果两个端点都在平面内,则解为线段;
- 如果有一个交点,且有一端端点在平面内部,则解为交点后在平面内部端点所组成的线段;如果没有端点落在平面内,则解为交点;
- 如果有两个交点,则解为两个交点组成的线段;
所以我们可以先把平面转换成线段(组成平面的线段),然后与给定线段进行Segment Intersection算法求点交,之后再根据上述情况分情况进行讨论即可,但要注意平面线段自己的交点不需要报告。并且图例中我们使用的三角形,但任意凸多边形都有相似的性质。并且根据教材上面的定理:
〖推论4.4〗1
给定平面上的一组共n 张半平面,可以使用线性的空间,在O(nlogn)时间内计算出其公共的交集。
我们可知,这个解法的时间复杂度为O( nlogn ),但说实话,这个解法实现难度超高,因为需要另外两个算法(Segment Intersection & MapOverlay )作为基础算法,才能进行实现,所以不太推荐Half-plane Intersection去解决本题。大家可以看看 2.5 其他解法 中的其他思路。
到此我们讲解完Half-plane Intersection的实现细节,同时在这里我们也全部实现和讲解了 清华计算几何 10个大作业,不知道大家一路看下来,觉得难度如何?是不是既折磨又享受哒?哈哈,也感谢大家一路以来的支持咯,能看到这里真是辛苦了呢~~之后应该会把重心转向找工和个人网站的搭建上面了,再像现在这样无忧无虑的搞研究的机会可能不多了呢。
最后在这里感叹一句哒:这个过程真的是,很开心哦~ 那么,暂时拜拜咯ヾ(•ω•`)o
2.5 其他解法
根据 @IIIustrious 的思路,本题可以利用凸包算法来解决,具体思路如下:
数据点筛选:
数据点存在以下问题,需要经过处理才能使用。
- 有的线段横坐标相同
- 给定线段的纵坐标顺序混乱
- 线段的两个端点同时存储在一个三元组里。
针对以上问题,需要特殊处理数据:
- 同一横坐标有多条直线的,只保留一对端点,下端点取所有下端点中最高的,上端点取所有上端点中最小的
- 在输入时判断两个纵坐标大小,看情况swap一下
- 上点和下点分开存储,放在数组里
求半凸包:
需要求上下端点的半凸包,这里封装了Andrew算法求半凸包:先横坐标排序再Graham Scan。
线性扫描求交:
需要判断上下半凸包是否有交,有交一般来说就是没有直线能通过。有交但是能通过一条直线时需要特殊判断。
对于上下半凸包的点序列,讲其中一个视为点序列,另一个视为线段序列。判断点序列是否一直在线段序列的上方(或下方)。如果不是就说明有交。这个判断需要做两次,分别把上下半凸包视为点序列。
3. 伪代码
※ Map Overlay 的伪代码请参考 MapOverlay & Boolean Operations 实现讲解(PS/Photoshop布尔运算底层算法)
3.1 Half-plane Intersection
Algorithm INTERSECTHALFPLANES(H)
算法 INTERSECTHALFPLANES(H)
Input. A set H of n half-planes in the plane.
输入:由平面上n 张半平面组成的一个集合H
Output. The convex polygonal region C := ∩ h∈H h.
输出:凸多边形区域 C := ∩ h∈Hh
1. if card(H) = 1
1. if (card(H) == 1)
2. then C <- the unique half-plane h ∈ H
2. then C <- H 中唯一的那张半平面h
3. else Split H into sets H1 and H2 of size ceilling(n/2) and floor(n/2).
3. else 将H 分成两个子集H1 和H2,大小分别为ceilling(n/2)和floor(n/2)
4. C1 <- INTERSECTHALFPLANES(H1)
4. C1 <- INTERSECTHALFPLANES(H1)
5. C2 <- INTERSECTHALFPLANES(H2)
5. C2 <- INTERSECTHALFPLANES(H2)
6. C <- INTERSECTCONVEXREGIONS(C1,C2)
6. C <- INTERSECTCONVEXREGIONS(C1,C2)
3.2 Linear Programming
※ 有界Linear Programming 算法中,数学浓度最高部分为“1. 令v0 为C0 的角点”,这个角点判断还需结合实际生产情况来决定
// 有界Linear Programming
Algorithm 2DRANDOMIZEDBOUNDEDLP(H, →c, m1, m2)
算法 2DRANDOMIZEDBOUNDEDLP(H, →c, m1, m2)
Input. A linear program (H ∪ {m1,m2}, →c), where H is a set of n half-planes, c ∈ R2, and m1, m2 bound the solution.
输入:一个线性规划问题(H∪{m1, m2}, →c) (* 其中H 为由n 张半平面组成的一个集合,→c ∈ R2,m1 和m2 为解设定了边界 *)
Output. If (H ∪ {m1,m2}, →c) is infeasible, then this fact is reported. Otherwise, the lexicographically smallest point p that maximizes f→c(p) is reported.
输出:若(H∪{m1, m2}, →c)是不可行的,则报告这一情况否则,报告出使f→c(p)达到最大的(依字典序的)最小点
1. Let v0 be the corner of C0.
2. 令v0 为C0 的角点
3. Compute a random permutation h1, . . . ,hn of the half-planes by calling RANDOMPERMUTATION(H[1· · ·n]).
4. 调用RANDOMPERMUTATION(H[1…n]),生成这些半平面的一个随机排列:h1, h2, …, hn
5. for i <- 1 to n
6. for i <- 1 to n
4. do if vi−1 ∈ hi
4. do if vi−1 ∈ hi
5. then vi <- vi−1
6. then vi <- vi−1
7. else vi <- the point p on li that maximizes fc(p), subject to the constraints in Hi−1.
8. else vi <- 点p (* p来自li 上,它满足Hi-1 中的所有约束条件,而且使f→c (p)达到最大 *)
7. if p does not exist
7. if (点p 不存在)
8. then Report that the linear program is infeasible and quit.
8. then 报告“该线性规划问题不可行”,然后退出
7. return vn
8. return vn
※ 无界Linear Programming 算法中,数学浓度最高部分为“1. 判断是否存在某个方向矢量→d,满足→d·→c > 0,并且对所有的h ∈ H 都有→d·→η (h) ≥ 0”,教材上有关于这个矢量d的判断方法,但是笔者数学功力实在不够,没法理解实现哦
// 无界Linear Programming
Algorithm 2DRANDOMIZEDLP(H, →c)
算法 2DRANDOMIZEDLP(H, →c)
Input. A linear program (H, →c), where H is a set of n half-planes and→c ∈ R2.
输入:线性规划问题(H, →c),其中H 为由n 张半平面组成的一个集合,→c ∈ R2。
Output. If (H, →c) is unbounded, a ray is reported. If it is infeasible, then two or three certificate half-planes are reported. Otherwise, the lexicographically smallest point p that maximizes fc(p) is reported.
输出:若(H, →c)是无界的,则返回一条射线若不可行,则返回两到三张作为凭证的半平面否则,在使函数f→c达到最大的那些点中,返回字典序最小者。
1. Determine whether there is a direction vector →d such that →d · →c > 0 and →d · η(h) >= 0 for all h ∈ H.
1. 判断是否存在某个方向矢量→d,满足→d·→c > 0,并且对所有的h ∈ H 都有→d·→η (h) ≥ 0
2. if →d exists
2. if (这样的 →d存在)
3. then compute H' and determine whether H' is feasible.
3. then 计算出H',并判断H'是否可行
4. if H' is feasible
4. if (H'是可行的)
5. then Report a ray proving that (H, →c) is unbounded and quit.
5. then 报告一条可以证明(H, →c)无界的射线,然后退出算法
6. else Report that (H, →c) is infeasible and quit.
6. else 报告“(H, →c)是不可行的”,然后退出算法
7. Let h1,h2 ∈ H be certificates proving that (H, →c) is bounded and has a unique lexicographically smallest solution.
7. 令h1, h2 ∈ H 为所谓的“凭证”半平面 (* 它们确保了(H, →c)的有界性,同时说明按照字典序,该问题存在唯一的最小解 *)
8. Let v2 be the intersection of l1 and l2.
8. 令v2 为l1 和l2 的交点
9. Let h3,h4, . . . ,hn be a random permutation of the remaining half-planes in H.
9. 设h3, h4, …, hn 为H 中其余半平面的一个随机排列
10. for i <- 3 to n
10. for i <- 3 to n
11. do if vi−1 ∈ hi
11. do if vi−1 ∈ hi
12. then vi <- vi−1
12. then vi <- vi−1
13. else vi <- the point p on li that maximizes fc(p), subject to the constraints in Hi−1.
13. else vi <- p (* p来自li 上,它满足Hi-1 中所有约束条件,并使函数f→c达到最大 *)
14. if p does not exist
14. if (p 不存在)
15. then Let hj,hk (with j,k < i) be the certificates (possibly hj = hk) with hj ∩ hk ∩ li = ∅.
15. then 令hj 和hk 为满足hj ∩ hk ∩ li = ∅的两张凭证半平面 (* j, k < i,但是有可能hj = hk *)
16. Report that the linear program is infeasible, with hi,hj,hk as certificates, and quit.
16. 报告“该线性规划问题是不可行的”提供凭证半平面hi、hj 和hk 退出算法
17. return vn
17. return vn
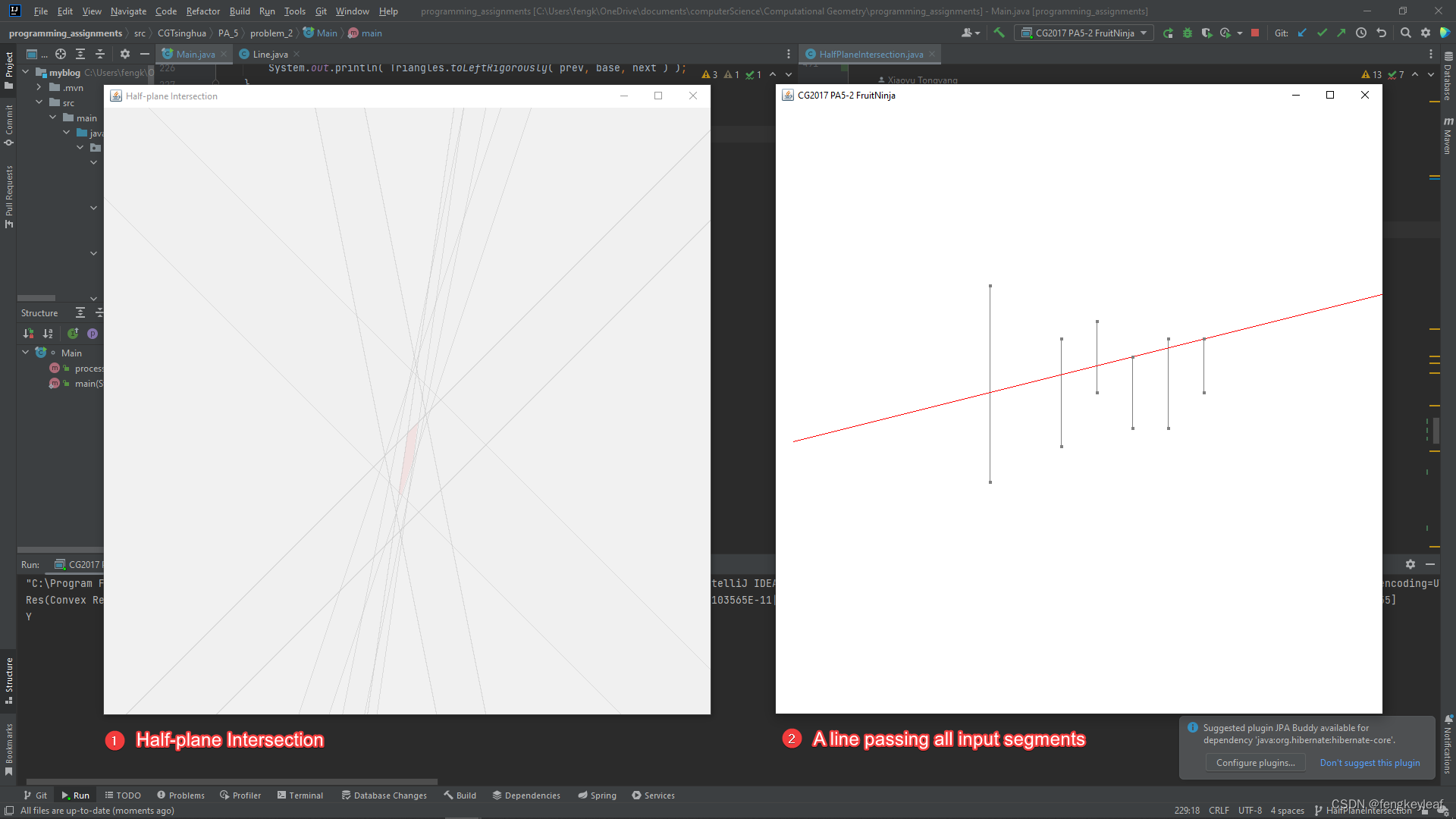
4. 可视化结果示例
这里给到题目网页上的一个实例的可视化结果,左边的结果是线段在对偶平面求得的半平面相交区域,右边的结果是可视化解集中的其中一个解(一条满足题意的直线)
5. 项目代码
个人作业项目代码:Algorithm
1.1.10 MapOverlay & Boolean Operations
| Description | Entry method\File |
|---|---|
| Computing the overlay of two subdivisions | Face compute( Face s1, Face s2 ) |
| Compute the intersection of two subdivisions, P1 ∩ P2. | List<Face> intersection( Face s1, Face s2 ) |
| Compute the union of two subdivisions, P1 ∪ P2, | List<Face> union( Face s1, Face s2 ) |
| Compute the difference of two subdivisions, P1 \ P2. | List<Face> difference( Face s1, Face s2 ) |
1.1.11 Half-plane Intersection
| Description | Entry method\File |
|---|---|
| Compute half-plane intersection. | void intersect( List<HalfPlane> H ) |
| Get current result type. | Type getResultType() |
| Program ( including visualization ) | CG2017 PA5-2 FruitNinja |
1.1.12 Duality
| Description | Entry method\File |
|---|---|
| Transform this point in the primary plane into the dual plane, point to line. | Line toDuality() |
| Transform this point in the dual plane into the primary plane, point to line. | Line fromDuality() |
| Transform this line in the primary plane into the dual plane, line to point. | Vector toDuality() |
6. 拓展(Follow-ups)
- 使用 Linear Programming 对本题进行求解,以达到最优时间复杂度O( n );
- 是否有方法可以不使用 Bounding Box 来进行 Half-plane 有限化,也能正确求得Half-plane Intersection;
7. 参考资料
- Computational Geometry: Algorithms and Applications
- 计算几何 ⎯⎯ 算法与应用, 邓俊辉译,清华大学出版社
- 计算几何 | Computational Geometry
8. 免责声明
※ 本文之中如有错误和不准确的地方,欢迎大家指正哒~
※ 此项目仅用于学习交流,请不要用于任何形式的商用用途,谢谢呢;
















 1123
1123











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









