







刚体就是 "刚性物体",它在运动过程中,内部各质点间的相对位置不会改变,也即 每两个质点间的距离 保持不变
假设刚体内任意两个质点,坐标分别为 和
,则在刚体运动过程中,这两个质点满足如下条件:
例如:影视剧《西游记》中的法宝金刚琢、玉净瓶是刚体;而幌金绳、芭蕉扇等,则不是刚体
1 刚体变换
1.1 矩阵形式
OpenCV 之 图像几何变换 中的等距变换,实际是二维刚体变换
从平面推及空间,三维刚体变换的矩阵形式为
例如:空间任一点,在相机坐标系中为 ,世界坐标系中为
,则
就是一个刚体变换

1.2 约束分析
R 和 T 共有 12 个未知数,但 R 是标准正交矩阵,自带 6 个约束方程,则刚体变换有 12 - 6 = 6 个自由度 (和直观的感受一致)
表面上看,似乎只需两组空间对应点,联立 6 个方程,便可求得 6 个未知数,但这 6 个方程是有冗余的 (因为这两组对应点,在各自的坐标系下,两点之间的距离是相等的)
因此,第二组对应点,只是提供了 2 个约束方程,加上第一组对应点的 3 个约束,共有 5 个独立的方程
显然,还需要第三组对应点,提供 1 个独立的方程,才能求出 R 和 T
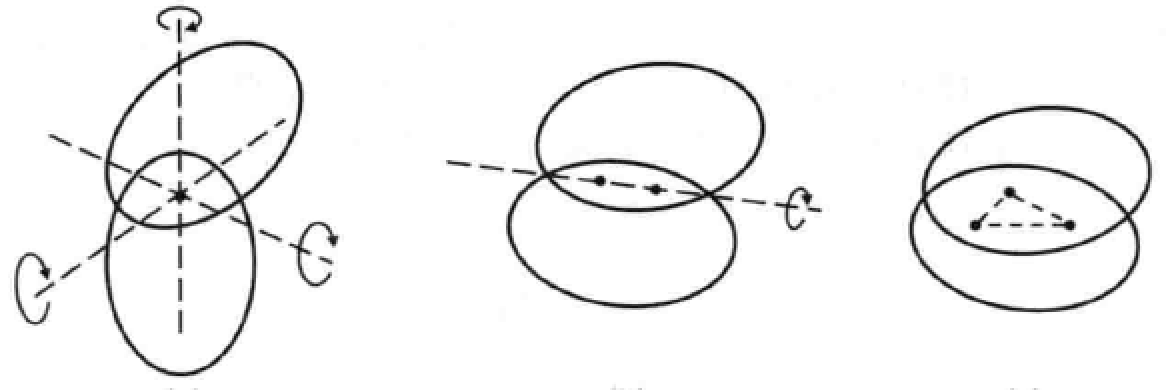
如图所示,两个刚体之间:1个点重合 => 3个自由度;2个点重合 => 1个自由度;3个点重合=> 0个自由度
OpenCV 中有一个函数 estimateAffine3D() 可求解刚体变换的矩阵
1.3 直观理解
一个单位立方体,可在 X-Y-Z 坐标系中自由运动,则二者之间的转换关系,可视为刚体变换
单点重合:当立方体的角点 0 和 X-Y-Z 坐标系的原点 O 重合时,立方体还能自由的旋转 (X 轴 -> Y 轴 -> Z 轴)

两点重合:除了立方体的角点 0 和坐标系的 原点 O 重合外,再令角点 4 和 X 轴上的某点重合,则此时立方体只能 绕 X 轴旋转
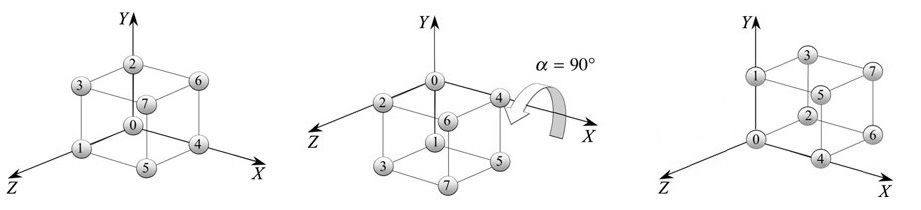
三点重合:除了以上两个角点 0 和 4,如果再使角点 1 和 Z 轴上的某点重合,则立方体就会和 X-Y-Z 坐标系 牢牢的连接在一起
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 461
461











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









