







1. 车道偏离报警功能概述
LDW在自身车辆发生了无意识车道偏离的情况下对驾驶员进行告警。无意识的车道偏离既包括已经发生的车道偏离,也包括即将发生的车道偏离。对驾驶员的告警可以减少侧向碰撞以及其它相关事故的发生。
在车道边线可见的情况下,LDW使用视频系统的车道边线探测系统测量自身车辆与车道两侧边缘线的相对距离与方位。除了使用这些几何信息触发告警之外,环境因素也会被检查以抑制由于有意的车道偏离而触发的告警。
在整车系统中,告警可以通过视觉、声音或触觉形式体现。LDW对不同类型(实线、虚线和点状线)和颜色(白色、黄色、橙色和蓝色)的道路标记线均有效。LDW对没有车道标记线的路沿也有效。
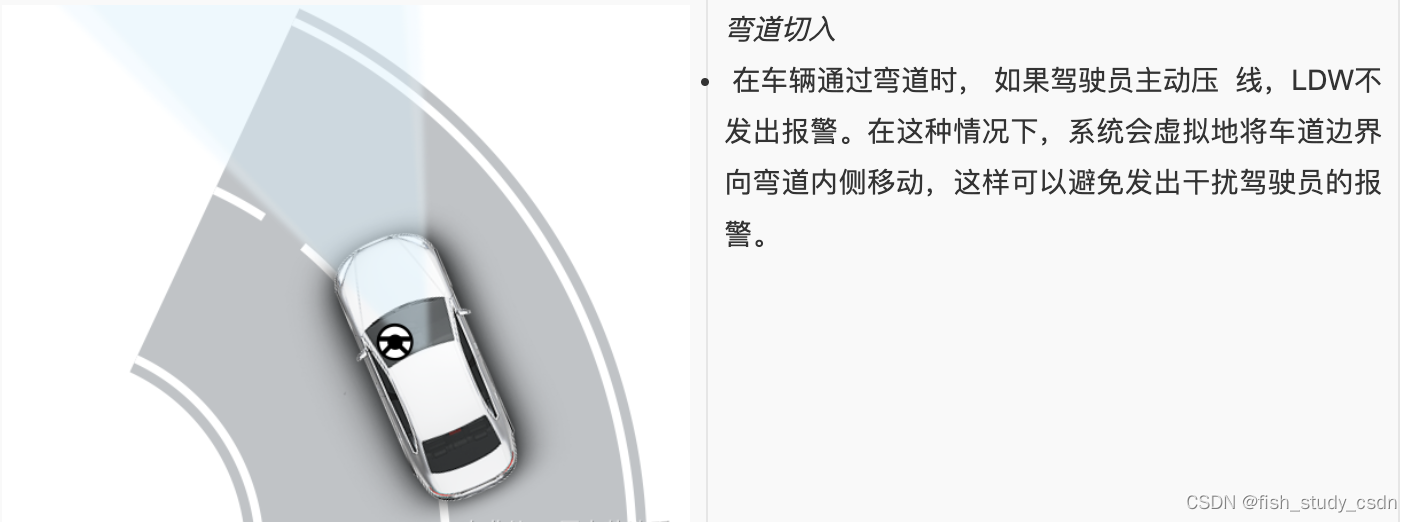
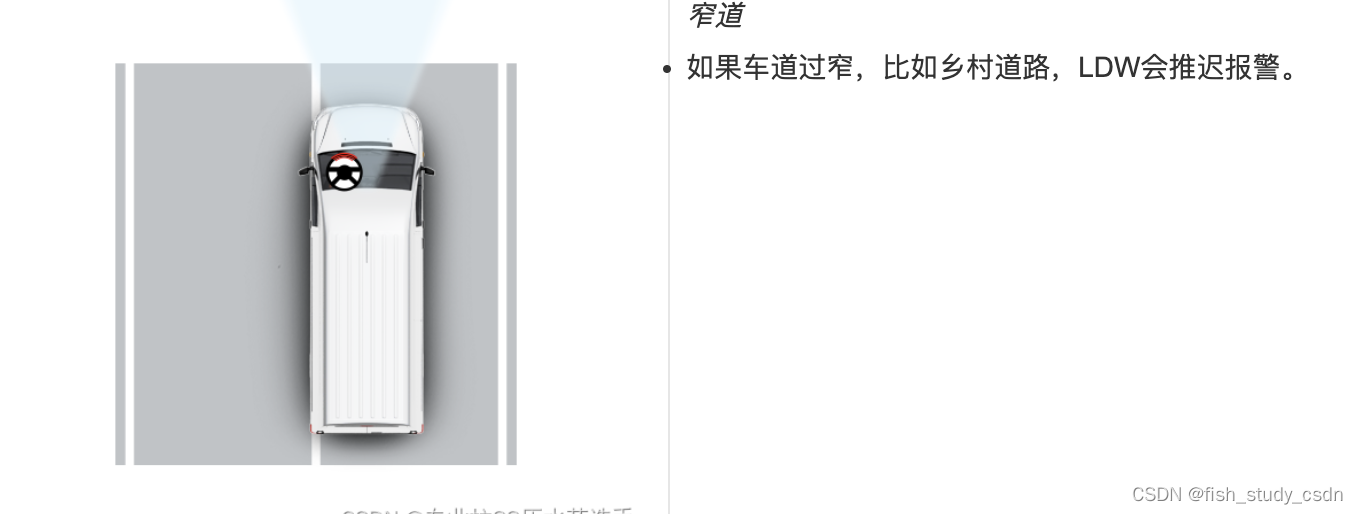
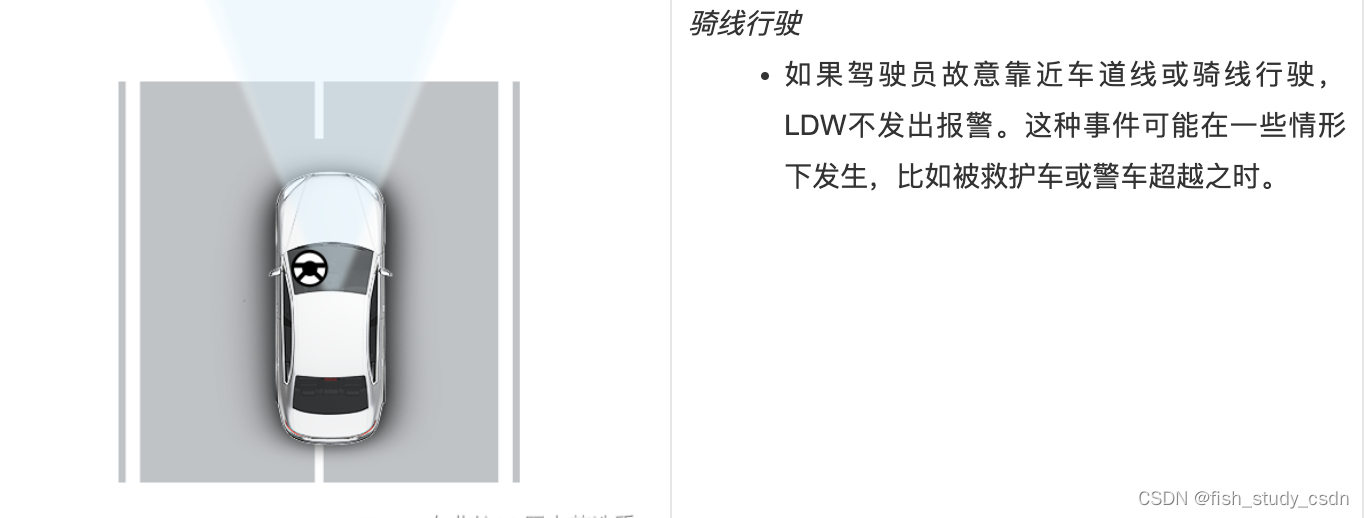
2. 典型用例
表1 LDW典型用例





2.1 功能开启
LDW在下列条件全部满足的情况之下会被开启(可以根据客户需求进行配置):
- 摄像头初始化正确完成。
- 驾驶员通过硬开关或软开关开启了LDW功能,或者LDW在之前的点火周期已开启。
- LDW未检测到故障,例如摄像头失明或过热。
- LDW根据车辆配置码被开启。
2.2 功能解除
LDW在下列任何一个条件满足的情况之下会被解除(可以根据客户需求进行配置):
- 驾驶员通过硬开关或软开关关闭了LDW功能,或功能已经在之前的点火周期关闭。
- LDW检测到故障,例如摄像头失明或过热。故障解除后,驾驶员需要重新开启功能。
- LDW根据车辆配置码被关闭。
3. 状态机/工作序列
3.1 状态迁移图
LDW状态迁移图见图10。
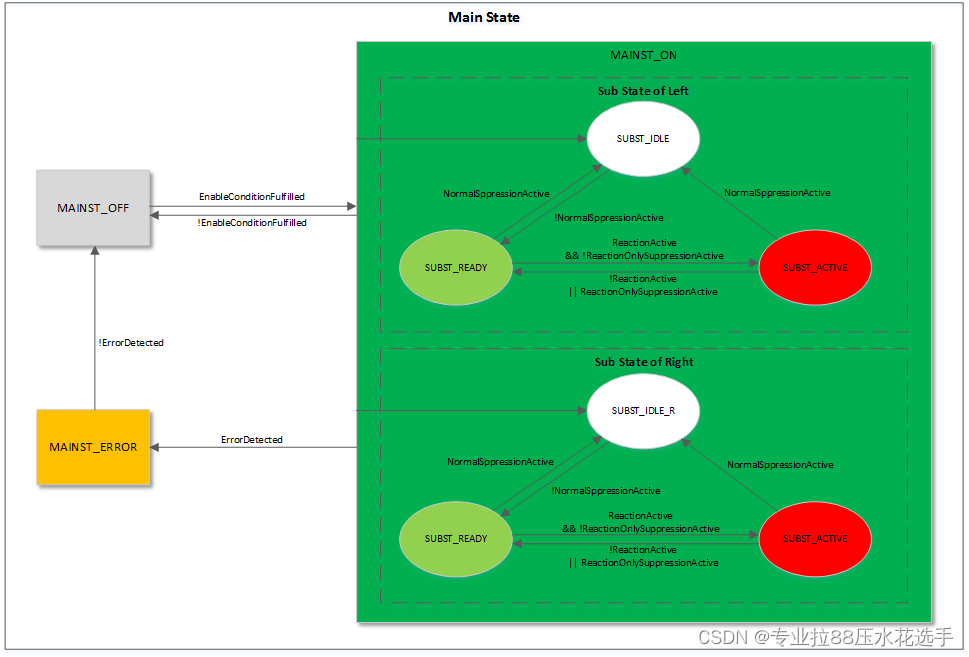
3.2 状态与事件
3.2.1 State状态
LDW会使用两种状态
- 主状态
- 子状态
主状态有三种可能性:
- MAINST_OFF
- MAINST_ON
- MAINST_ERROR
针对每一侧(左侧和右侧),子状态有三种可能性:
- SUBST_IDLE
- SUBST_READY
- SUBST_ACTIVE
表2给出了输出信号的映射机制:
表2:LDW状态到输出信号的映射机制
| 输出信号值 | 主状态 | 左侧子状态 | Sub State Right 右侧子状态 | Comments 说明 |
| LDW_Status | ||||
| LDW off | MAINST_OFF | |||
| LDW standby | MAINST_ON | SUBST_IDLE | SUBST_IDLE | |
| LDW active | MAINST_ON | SUBST_READY SUBST_ACTIVE | SUBST_READY SUBST_ACTIVE | 只需一侧(左侧或右侧)子状态满足条件即可。 |
| LDW failure | MAINST_ERROR | |||
| Camera blocked | MAINST_ERROR | |||
| LDW_LeftTrackingStatus | ||||
| No display | SUBST_IDLE | |||
| Line trakcing | SUBST_READY | |||
| Warning | SUBST_ACTIVE | 相应的振动报警频率和幅度会发送出去。 | ||
| LDW_RightTrackingStatus | ||||
| No display | SUBST_IDLE | |||
| Line trakcing | SUBST_READY | |||
| Warning | SUBST_ACTIVE | 相应的振动报警频率和幅度会发送出去。 | ||
3.2.2 Events事件
按状态迁移图所示,事件可以触发状态的改变,相关的事件描述见表3。
表3:事件
| 条件 | 备注 |
| EnableConditionFulfilled (下述条件均需满足) | |
| 摄像头初始化已正确完成 | |
| 驾驶员已将功能开启,或者功能在之前的点火周期已开启 | |
| 功能已被配置 | |
| ErrorDetected (下述条件中至少一项需满足) | |
| 永久性系统硬件故障被检测到 | |
| 临时性系统硬件故障被检测到 | |
| 摄像头永久性失明被检测到 | |
| 摄像头处在过热保护模式 | |
| 摄像头处在高压保护模式 | |
| 运行时间故障导致系统热重启 | |
| 相关的通信故障被检测到,例如报文超时,报文计数器故障,冗余检查故障和数据长度故障 | |
| 相关的信号故障被检测到,例如输入的车速信号无效 | |
| NormalSuppressionActive (下述条件中至少一项需满足) 注:各抑制源可以独立配置。 | |
| 速度过低:
| |
| 速度过高:
| |
| 横摆角速率过高:
| |
| 自车道丢失:
| |
| 车道过宽:
| |
| 车道过窄
| |
| 车道曲率过高:
| |
| 变道:
| 变道事件表示车辆的自身车道发生了改变,例如车辆中心线偏出了当前车道边线。 |
| ABS和ESP作用:
| |
| ReactionOnlySuppressionActive (下述条件中至少一项需满足) 注:各抑制源可以独立配置。 | |
| 转向灯:
| |
| 制动:
| |
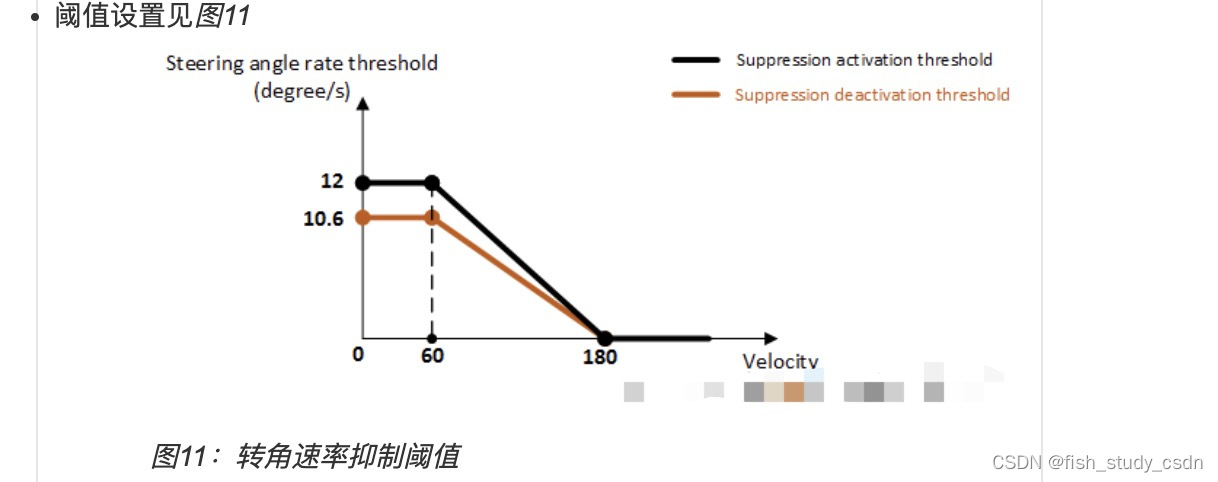
| 转角速率:
| |
| 油门踏板速率过高:
| 只对低灵敏度下的LDW有效 |
| Warn abort:
| |
| 危险警报灯:
| 可选项 |
| ReactionActive (下述条件需满足) | |
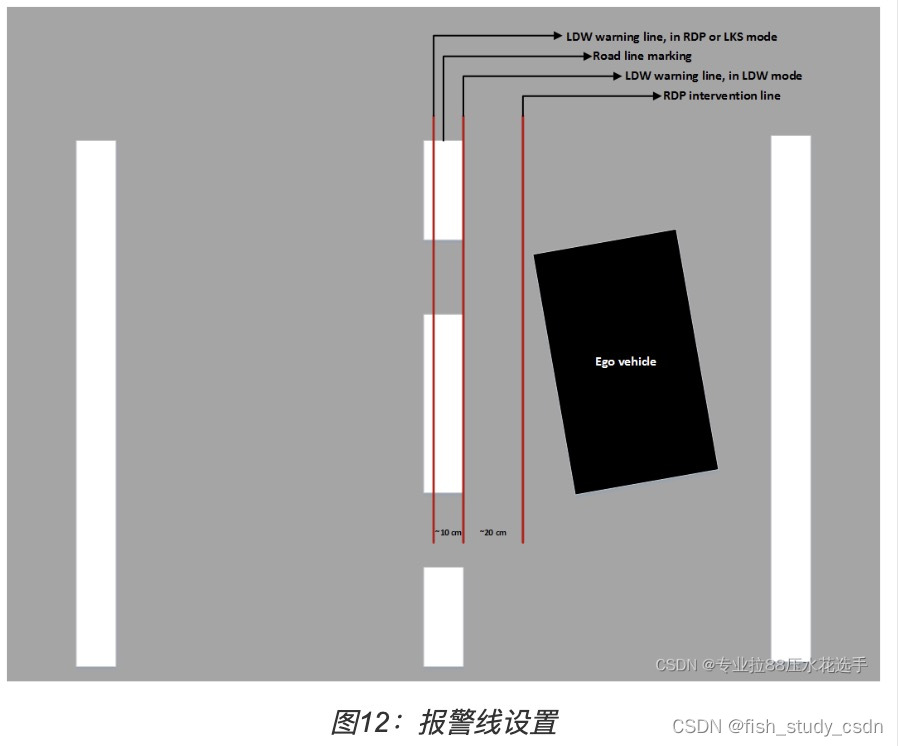
报警条件已满足:
- 前轮边缘 0.7 s(可调谐)之后将穿越报警线时触发此事件
- 如果功能在LDW模式下运行,报警线即为车道边界线的内边缘
- 如果功能在RDP或LKS模式下运行,报警线可以向外侧移动约10 cm。
报警线设置的示例见图12:
|
对于主状态迁移相关的事件,“!EnableConditionFulfilled”的优先级高于“ErrorDetected”,这表明如果此功能被关闭,即使有故障被探测到,功能仍旧处于“MAINST_OFF”。
对于子状态迁移,事件的优先级顺序如下:
- 最高优先级 – “NormalSuppressionActive”
- 第二优先级 – “ReactionOnlySuppressionActive”
- 第三优先级 – “ReactionActive”
4. 性能
表4 性能指标
| 关键性能指标 | 性能 |
| 可用性 | 高于95% |
| 误报率 | 低于1/1000 km |
| 漏报率 | 低于1/1000 km |
LDW可以满足下述标准:NHTSA Lane Departure Warning System NCAP Confirmation Test Feb 2013。
LDW可以满足下述标准:ISO 17361 – 2007 Intelligent transport systems – Lane Departure warning systems – Performance requirements and test procedures。
LDW可以满足下述标准:UNECE Regulation No. 130 Uniform provisions concerning the approval of motor vehicles with regard to the Lane Departure Warning System (LDWS)。
LDW可以满足下述标准:GB/T 26773–2011 智能运输系统 – 车道偏离报警系统 – 性能要求与检测方法。
5. 局限性
LDW功能会受限于摄像头故障,摄像头遮挡以及在章节“状态机/工作序列”中列举的各种抑制事件。如果摄像头未正确校准,性能会降低。 LDW性能受天气、照明度和车道线清晰度的影响。在背光,日落,路面被冰雪覆盖以及路面磨损严重的情况下,性能会有显著的下降

6.验证
LDW的性能通过硬件在环模拟进行评估。记录下来的视频文件和标记好的基础事实(例如手工标记的车道边线)作为输入,LDW的输出就可以参考标记的车道变线进行评估。除此之外,性能还会通过实车耐久性测试和场地测试进行评估。功能性能由客户进行最终确认。
7. 接口
摄像头通过车辆CAN总线与车辆进行通信。对于功能的输入和输出信号,参考客户定义的CAN矩阵。
8. 功能安全
按照ISO26262的要求,LDW功能被评定为QM。


















 748
748

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











