







前言:今天我们主要学习从一些特殊相机运动中求解Fundamental matrices
9.3 Fundamental matrices arising from special motions特殊运动中求解Fundamental matrices
我们在从特殊化平移方向 t 和旋转轴方向 a 的关系中可以得到几种特殊的相机运动形式,我们将会讨论这其中的两种情况:没有旋转的纯平移和纯平面运动,在第二种运动模型中t与a是垂直的。这里的纯指的是相机内参不发生变化。
9.3.1.1 纯平移
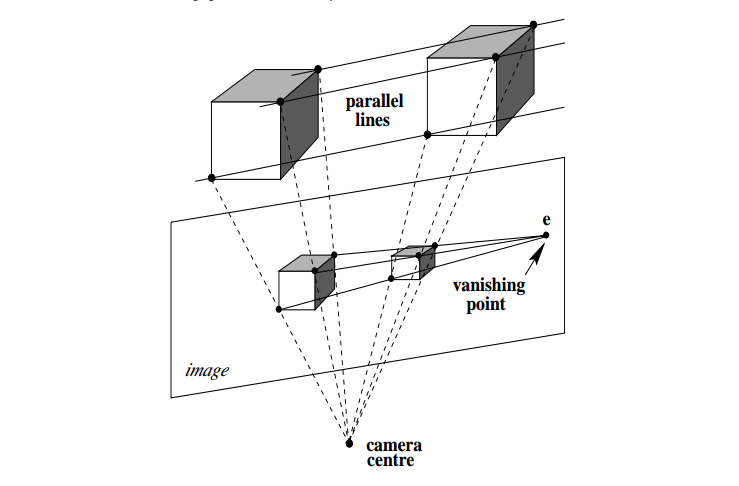
在这种运动中我们可以看成相机不动世界坐标系的三维点在以向量-t平移,他们平移的直线平行于t,且在图像上看这些直线会相交于消失点v,很明显v是两个视图的epipole,投影到图像平面的直线即是epipole line,话不多说,上图:
例9.6:我们假定相机纯平移运动,两个相机矩阵分别是P=K[I | 0]and P’=K[I | t],(这里读者要去看下书上244页,取R=I,K=K’),于是有,如果相机平移方向与x轴平行,那么
,所以
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 912
912

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









