







 本文介绍了使用Halcon进行1D测量的方法,重点关注如何测量特定灰度值的像素。首先找到ROI,然后通过gen_measure_rectangle2获取测量句柄。接着,利用measure_projection获取灰度值分布并进行平滑滤波。通过对Profile进行一阶和二阶导数运算找到边缘点,设置阈值筛选测量点。最后,通过坐标转换计算出测量点在图像中的实际位置。
本文介绍了使用Halcon进行1D测量的方法,重点关注如何测量特定灰度值的像素。首先找到ROI,然后通过gen_measure_rectangle2获取测量句柄。接着,利用measure_projection获取灰度值分布并进行平滑滤波。通过对Profile进行一阶和二阶导数运算找到边缘点,设置阈值筛选测量点。最后,通过坐标转换计算出测量点在图像中的实际位置。
测量的目的就是得到测量点的图像坐标
1. 首先在测量之前我们明白,测量点和背景之间一定有灰度值的差异,这是前提。
2. 和前面一样,首先必须找到一个ROI。然后通过gen_measure_rectangle2得到一个测量的句柄。
3. 由于我们不是测量边缘对,所以要换方法了,但是和测量边缘对的原理相同,我们需要先得到灰度值分布(gray value Profile),算子measure_projection可以找到,但是注意,他返回的是原始的,没有经过平滑滤波的“线条”上的灰度值,注意这里的Profile只是一个元组,也就是从0开始间隔1采集到的像素值(把Profile均分为主轴长度个像素Length1*2,当然像素值要插值),我们所要找的测量点必须要在这个“线条”上,然后才能得到测量点的坐标。
4. 为了减小噪声的影响,使结果更准确,必须先对Profile进行平滑滤波smooth_funct_1d_gauss,但是前面说过Profile是离散的点,必须要先把这些点使用create_funct_1d_array连接成一个函数才可以对其进行函数操作。下图是对某图Profile像滤波过后的灰度分布(注意根据横坐标的长度可以看出ROI Length1 = 220)
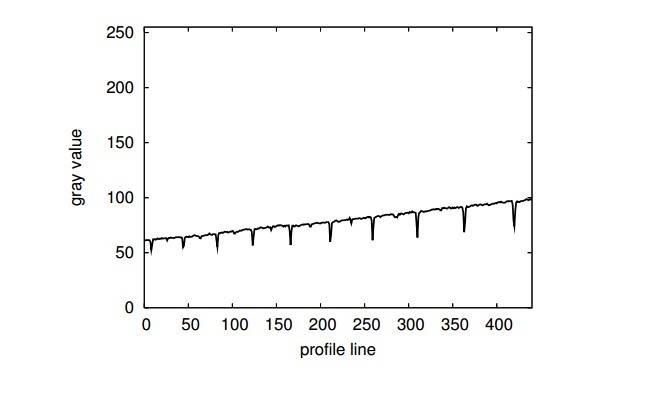
5. 平滑过后预处理就结束了。要开始找测量点了,找边缘最常用的就是找梯度求导了derivate_funct_1d (fuction: Mode: Derivative),其中Mode =
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2954
2954

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









