






芯片选型
域控架构设计中芯片的选型,是目前汽车电子领域非常关键的部分。域控制器(Domain Controller)是汽车电子架构的核心组成部分,它负责管理和控制汽车内各个电子系统的功能和性能
在座舱域方面,高通骁龙8155芯片是一款高性能车规级芯片,广泛应用于智能座舱系统。最新高通骁龙8295车规级芯片已经上车,高通骁龙8295车规级芯片是一款基于5nm制程的车规级芯片,其NPU(神经网络处理单元)算力高达30TOPS。该芯片还支持多传感器融合和WiFi6等各种功能,为汽车数字座舱提供了强大的处理能力和连接性能。
在智能驾驶领域,英伟达、地平线、黑芝麻等公司的芯片也都有广泛的应用。这些芯片具备强大的计算能力和处理能力,能够支持复杂的智能驾驶功能,如自动驾驶、车道偏离预警、自动泊车等。
对于普通的域控制器,NXP和英飞凌等半导体公司的芯片也是常见的选择。这些芯片通常具备较高的可靠性和稳定性,能够满足汽车电子系统对安全和可靠性的要求。
在选择域控架构和芯片时,需要考虑汽车的具体需求、应用场景、性能要求、成本等因素。同时,随着国产化汽车电子技术的不断发展和进步,未来会有更多新的芯片和技术应用到域控架构中。
域控软件架构-AUTOSAR CP
关于软件架构,首先大家一提到这个域控觉得它是个硬件,实际上域控里面最重要的一个特征就是软件和传统MCU专门控制器软件是有些不一样的,现在很多域控都有MCU用的是AUTOSAR软件架构。
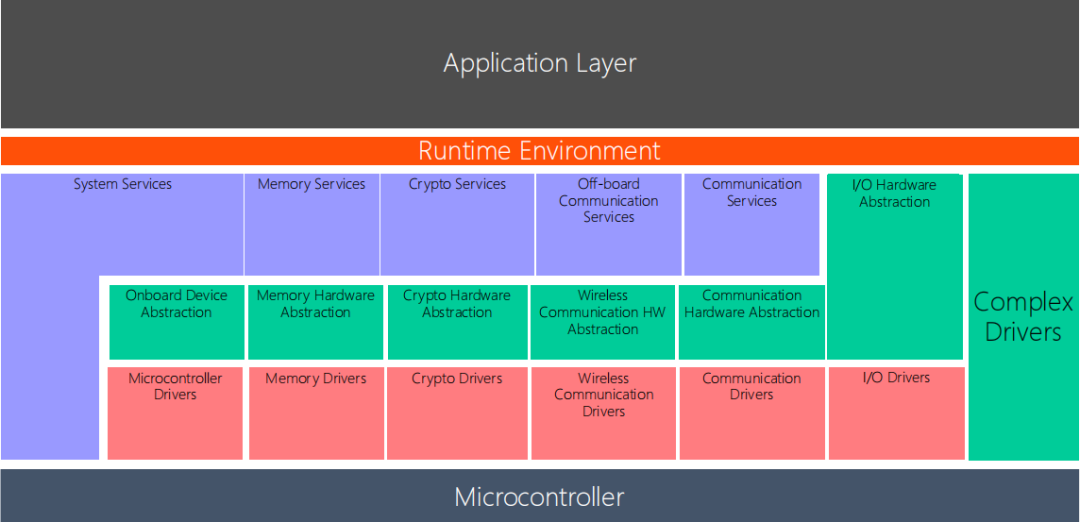
基本上目前来说比较成熟的是CP,也就是传统的MCU的一个软件架构,它的思想是分层设计,软硬件分离,软硬件解耦这个理念在AUTOSAR 里其实很早就已经提出这个概念,只是说现在我们希望能进一步解耦。
什么叫软硬件解耦呢,就是上面的应用层跟下面的底层的驱动,它们并不是完全相关的,我们应用只需要专注于自身的逻辑上的一些条件判断结果输出这些东西,至于如何驱动的底层的信息、如何传递的目前不是很关注,即使这个控制器开发完了,在下个控制器里面也可以继续应用过来。比方说:现在开发一个BCM控制器,这个BCM控制如果按照AUTOSAR上面的软件架构,它的底层驱动是跟这个硬件息息相关的,用什么芯片或者用什么电源芯片,这下面都跟驱动是相关的,上面的应用比如判断什么情况下把门打开,什么情况下锁打开解锁,这种属于应用上的一些逻辑,这些东西跟下面是没有关系的,这样带来的好处是这个控制器开发完了之后开发下一代控制器的时候,如果芯片升级驱动会变,但是上面应用的可以直接升级过来或者应用过来不用重写就能使用,只要上面通过中间键把它分装好,接口定义好那下面的驱动根据新的硬件进行适配不会影响上面的应用层。
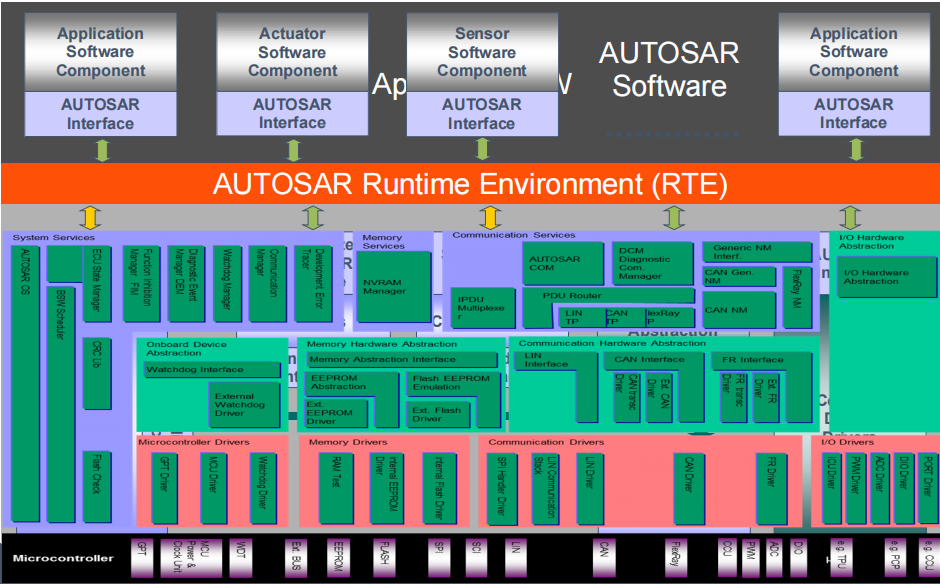
上面应用层可以专注于应用层开发,中间键叫RTE,其实就是一个通用中间键,它里面所需要的信号是从下面拿的,它是通过一个分装了以后那么下面的一些具体的驱动和服务,全部通过一层层的分配之后再中间键进行一个打包完之后应用层可以直接调用保证上面的应用层可以随意的裁剪和移植。下面的Microcontroller就是微控制器,就是MCU区所谓的调整,假如说芯片缺芯了换了一家芯片,那么下面只是驱动变了,上面是都可以尽量的复用,这是我们CP的一个整个思想。
域控软件架构-AUTOSAR AP
随着汽车行业的快速发展,特别是电动汽车(EV)、网联汽车(Connected Car)、自动驾驶(Autonomous Driving)和共享出行(Shared Mobility)等趋势的兴起,汽车软件面临着前所未有的挑战。这些趋势对汽车软件架构提出了更高的要求,需要汽车软件具备更高的灵活性、可扩展性和可维护性。AUTOSAR经典平台作为一种成熟的汽车软件架构,为传统的ECU提供了标准化的解决方案。然而面对未来汽车技术的快速发展,AUTOSAR也在不断地演进和升级,以适应新的需求。
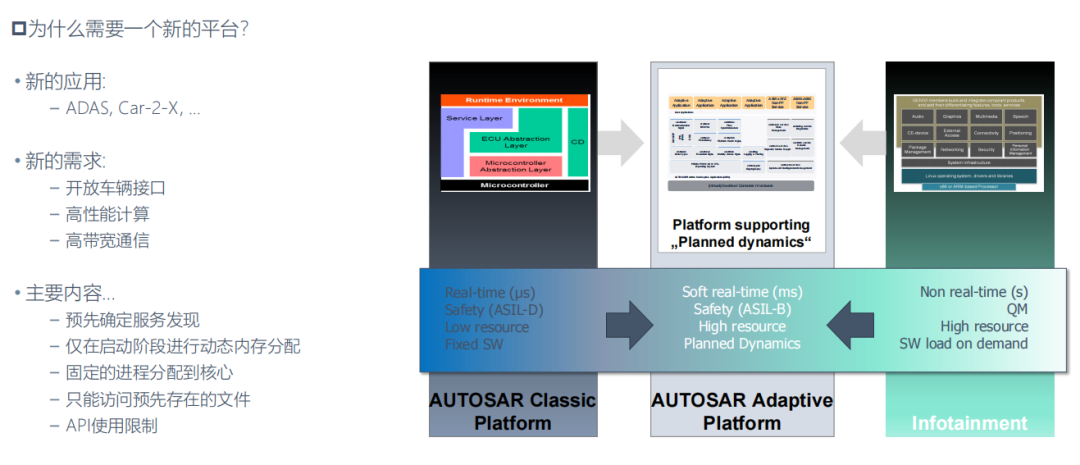
为了应对网联化、高度自动驾驶、共享化和电气化等挑战,汽车软件需要具备以下特点:
更高的灵活性:随着汽车功能的不断增加和更新,软件架构需要支持快速开发和部署新功能,同时保持与现有系统的兼容性。
可扩展性:汽车硬件性能的不断提升和新的传感器、执行器等设备的增加,软件架构需要能够支持更大规模和更复杂的系统。
安全性:汽车软件对车辆控制的影响越来越大,软件架构需要确保系统的安全性和可靠性,防止潜在的安全漏洞和故障。
云服务集成:网联化要求汽车软件能够与云服务无缝集成,实现远程更新、数据分析和高级功能。
跨平台兼容性:汽车硬件平台的多样化,软件架构需要能够在不同的硬件平台上运行,确保软件的复用性和成本效益。为了应对这些挑战,汽车软件架构正在向更加模块化、服务化和标准化的方向发展,重新升级了一个标准叫AUTOSAR AP。
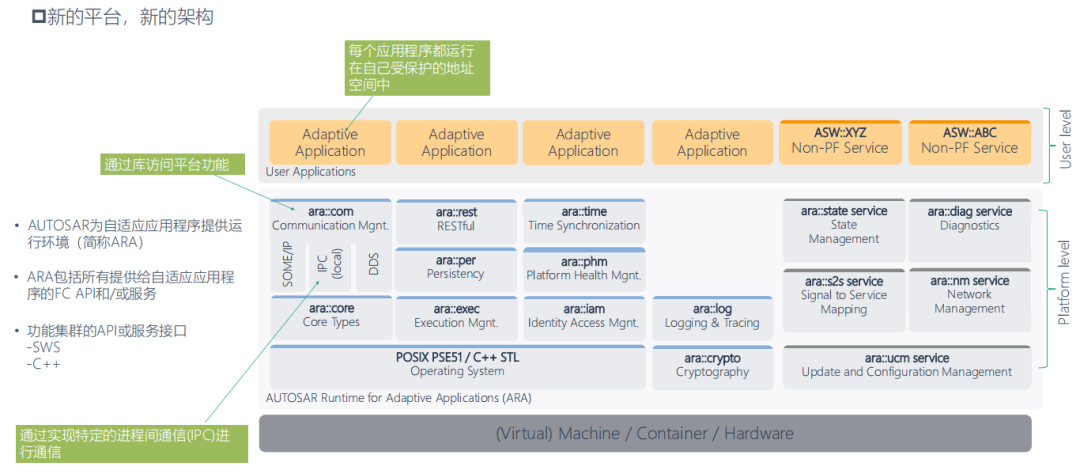
关于高性能运算和大带宽的支持,这是现代汽车电子系统,特别是自动驾驶、高级驾驶辅助系统(ADAS)等功能的关键要求。这些功能需要处理大量的传感器数据,进行复杂的计算和控制,因此需要高性能的处理器和大带宽的数据传输。MCU通常用于控制车辆的基本功能,如发动机、刹车等,而AP则更多地用于处理高级功能,如导航、娱乐、自动驾驶等。因此,AP通常需要支持更高的性能和更大的带宽。
AUTOSAR和其他软件架构(如NIUX等),它们都是为汽车电子系统提供标准化解决方案的架构。不同的架构有不同的特点和适用场景。AUTOSAR的优势在于其标准化和开放性,使得软件可以在不同的硬件平台上移植和重用。对于一些特定的应用或需求,主机厂可能会选择自己从头开始开发软件,而不是基于AUTOSAR等标准化架构。
特斯拉的做法就是一个很好的例子。他们选择自己开发整个控制器软件,从底层驱动到上层应用,以实现更高的灵活性和定制化。这种做法需要强大的研发实力和深厚的技术积累,但也带来了更高的技术风险和成本。

















 2008
2008

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









