







 本文研究了一种使用SMO算法的三相PMSM无速度传感器控制方法,通过反正切函数实现精确控制。文中详细阐述了算法原理、控制策略及其实验验证,结果显示该方法在保持系统稳定性和精度的同时,具有高效和抗干扰优势。
本文研究了一种使用SMO算法的三相PMSM无速度传感器控制方法,通过反正切函数实现精确控制。文中详细阐述了算法原理、控制策略及其实验验证,结果显示该方法在保持系统稳定性和精度的同时,具有高效和抗干扰优势。
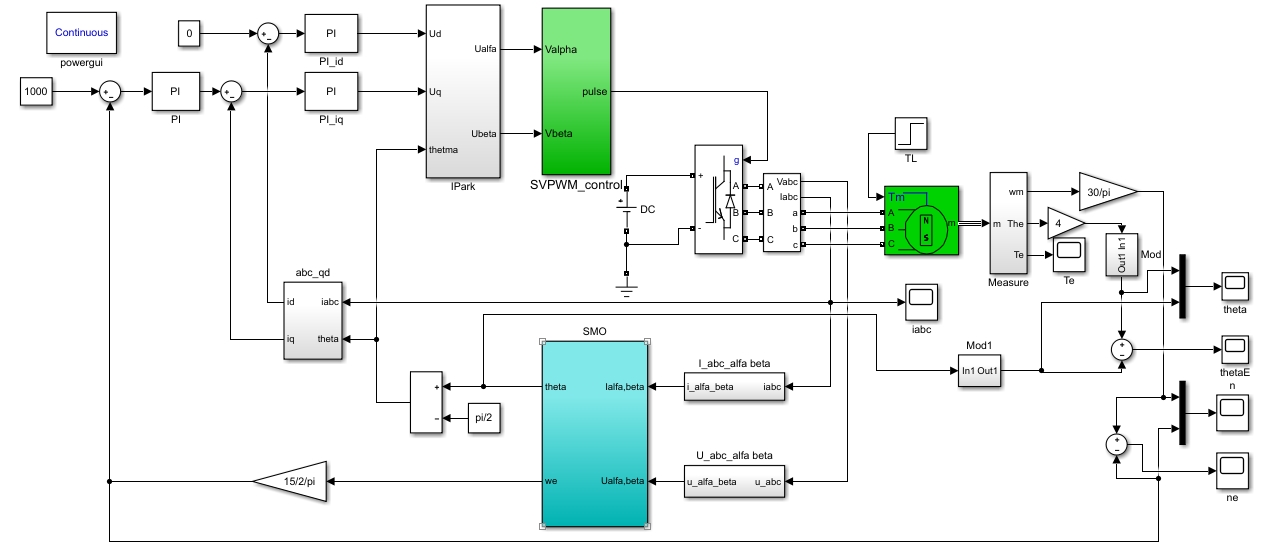
基于SMO的三相PMSM无速度传感器控制(基于反正切函数)
ID:355650044162074
jq1274749800
基于SMO的三相PMSM无速度传感器控制(基于反正切函数)
摘要:本文通过对基于SMO(Sequential Minimal Optimization)算法的三相PMSM(Permanent Magnet Synchronous Motor)无速度传感器控制方法进行研究和分析,提出了一种基于反正切函数的控制策略。通过该策略,系统可以在没有速度传感器的情况下实现对三相PMSM的精确控制。本文详细介绍了SMO算法的基本原理和三相PMSM的工作原理,并对基于反正切函数的控制策略进行了详细的数学推导和实验验证。实验结果表明,该控制策略在保证系统稳定性和控制精度的同时,还具有较高的控制效率和抗干扰能力。
关键词:SMO算法,三相PMSM,无速度传感器控制,反正切函数,系统稳定性,控制精度,控制效率,抗干扰能力
-
引言
三相PMSM是一种广泛应用于工业自动化领域的电机类型,其高效能、高自控性和高转矩密度等特点使得其成为了各种机电系统的首选。然而,传统的三相PMSM控制方法通常需要使用速度传感器来反馈电机的转速
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 442
442

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









