






文章目录
前言
在采用磁场定向的矢量控制时,一般都需要获取准确的转子位置及转速信息,这些信息一般需要传感器来获取,但在一些环境比较严格的场景或者为了节约成本,省去传感器模块,这就需要采用一定算法实现转子位置及转速的估计。
常用的有滑膜观测器算法,模型参考自适应控制,扩展卡尔曼滤波器算法。
这些基于基波激励数学模型的控制算法利用反电动势进行转子位置及转速的估计,但在零速和极低速,有用信号的信噪比很低,通常很难提取。
一、传统滑膜观测器
滑膜观测器原理
滑膜观测器位置估计原理
滑膜控制介绍1
滑模控制的核心思想是建立一个滑模面,将被控系统拉取到滑模面上来,使系统沿着滑模面运动。滑模控制的一个优势是无视外部扰动和不确定参数,采用一种比较“暴力”的方式达到控制的目的。
控制信号大都是一些开关信号,需要来回切换,对于硬件的要求比较高,切换高频信号会导致输出信号震荡,在滑模面来回震荡,通过滤波进行缓解。
滑膜控制介绍2
滑模控制(sliding mode control, SMC)也叫变结构控制,其本质上是一类特殊的非线性控制,且非线性表现为控制的不连续性。这种控制策略与其他控制的不同之处在于系统的“结构”并不固定,而是可以在动态过程中,根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动。
关键在于滑模面函数和滑膜增益的选取,既要保证收敛速度,也要避免增益过大产生的过斗问题,但该方法对参数变化和外部干扰不敏感,鲁棒性较强。
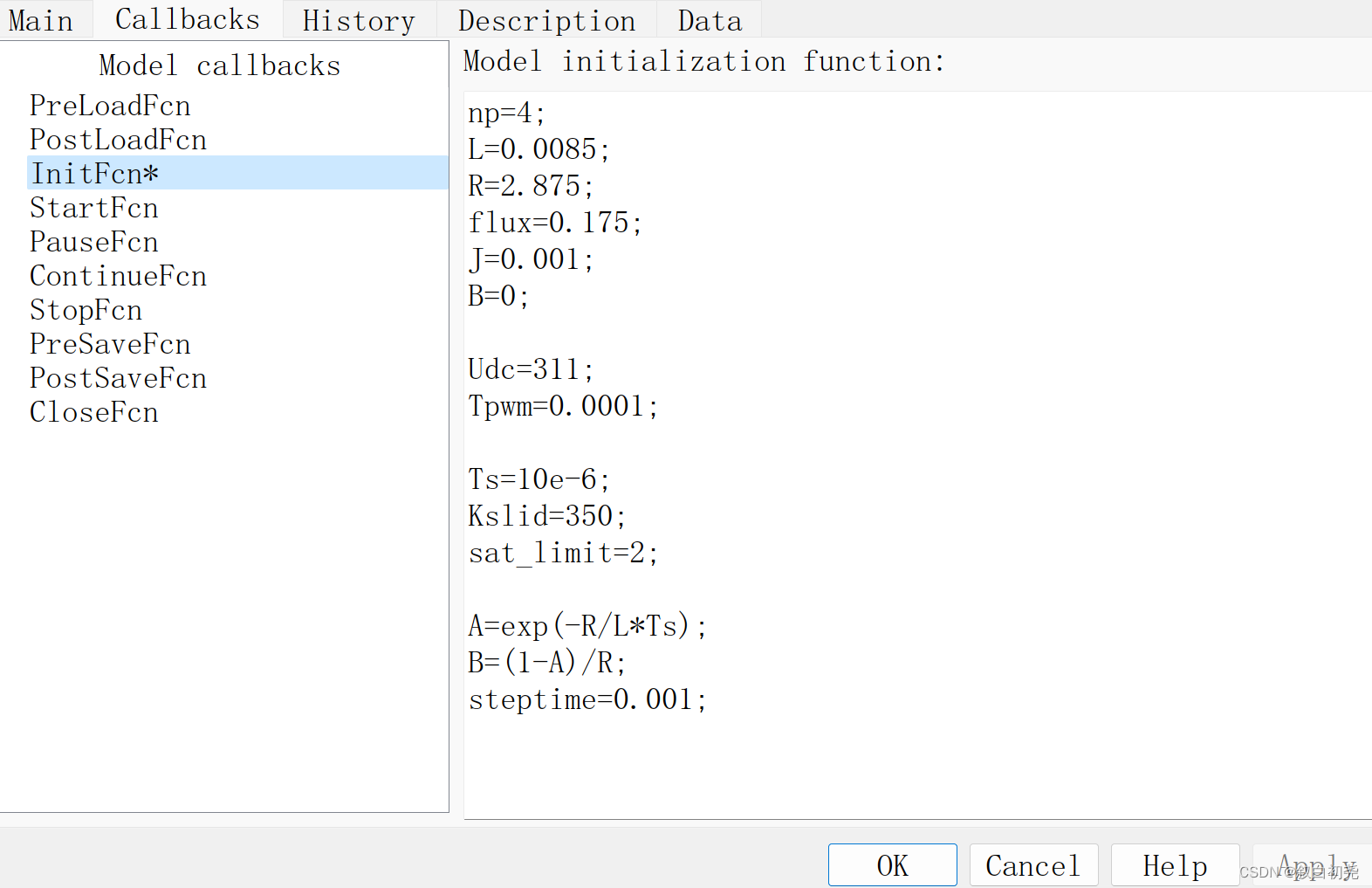
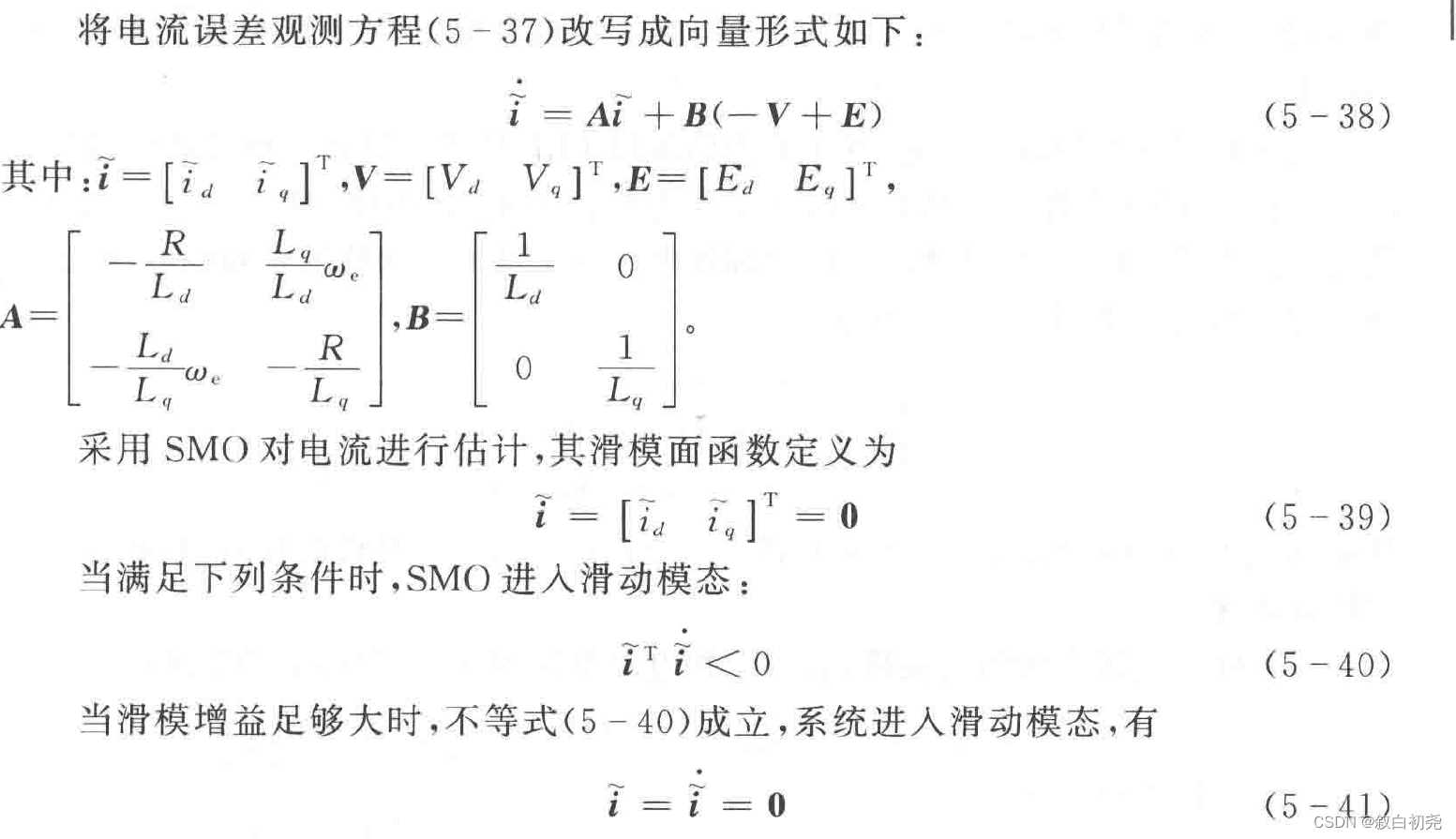
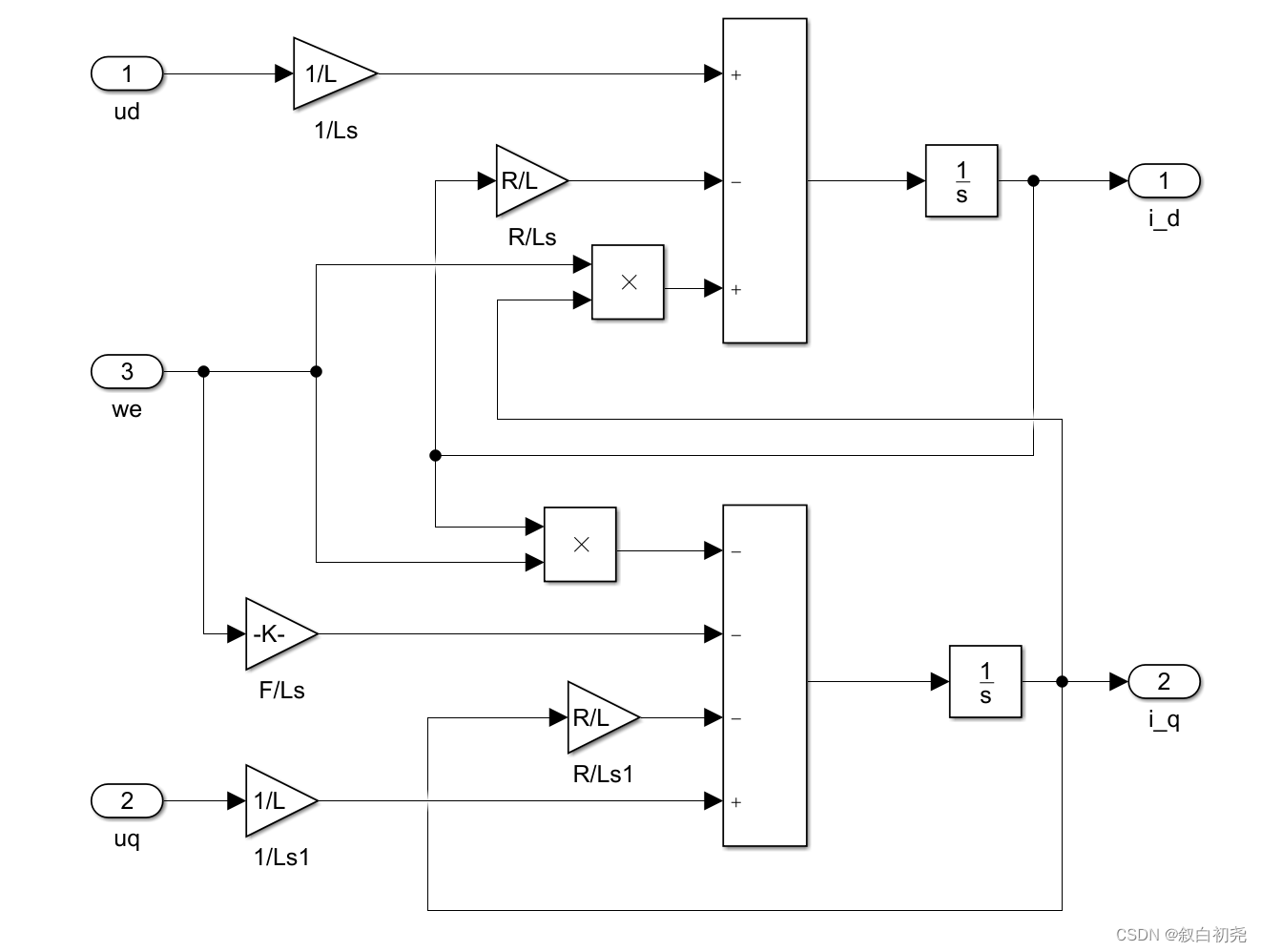
传统的滑膜观测器算法是在静止坐标系下建立,则静止坐标系下PMSM的数学模型如下。
电压方程:

反电动势:

可以看到反电动势包含电角度theta_e位置信息和转速信息,如果能够计算或者估计反电动势就可以通过数学方式估计出转子位置信息。
除了与转速有关,还与定子电流的其微分有关,当电机在高速重载条件下运行,定子电流产生较大的变化,从而产生反电动势畸变。
1.参照数学模型
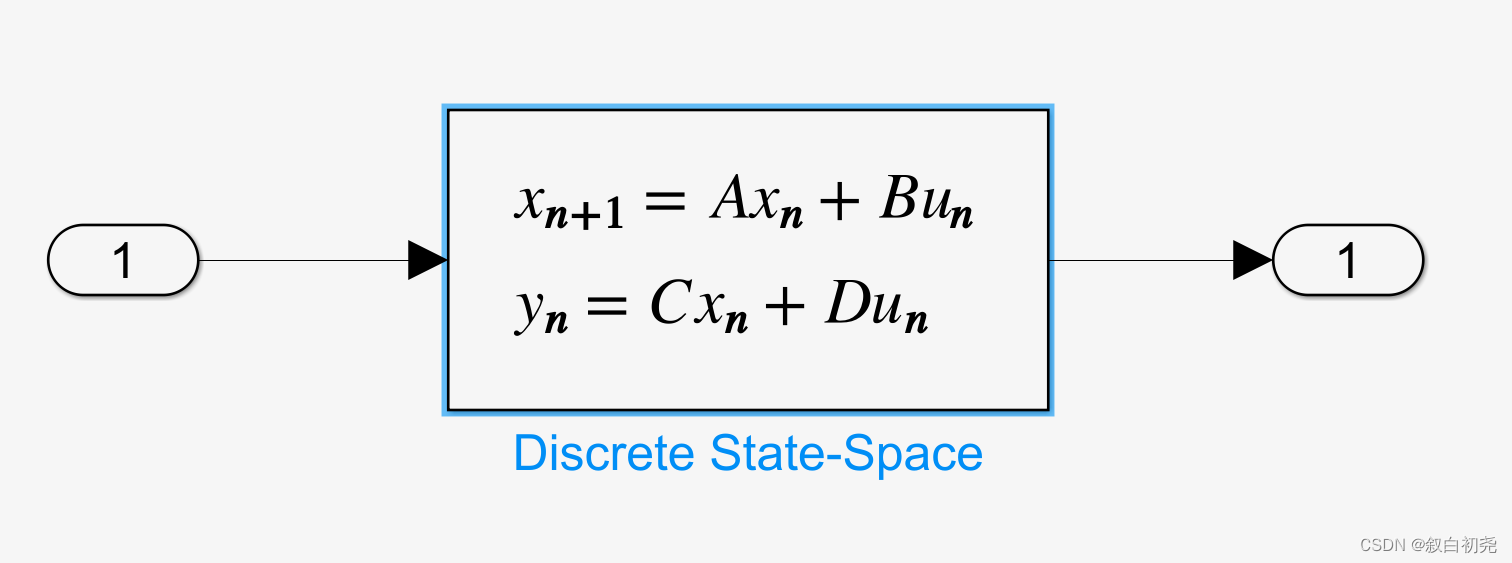
滑膜观测器设计时会以一个数学模型进行参照。选择PMSM静止坐标系下的电流状态方程作为参照模型。


2.滑膜观测器设计
包含:
(1)定子电流观测值
(2)控制开关量
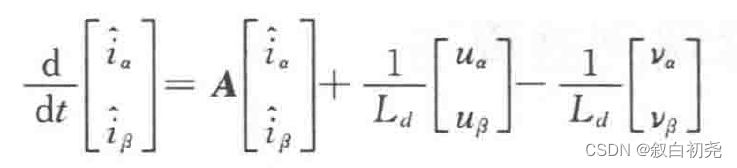
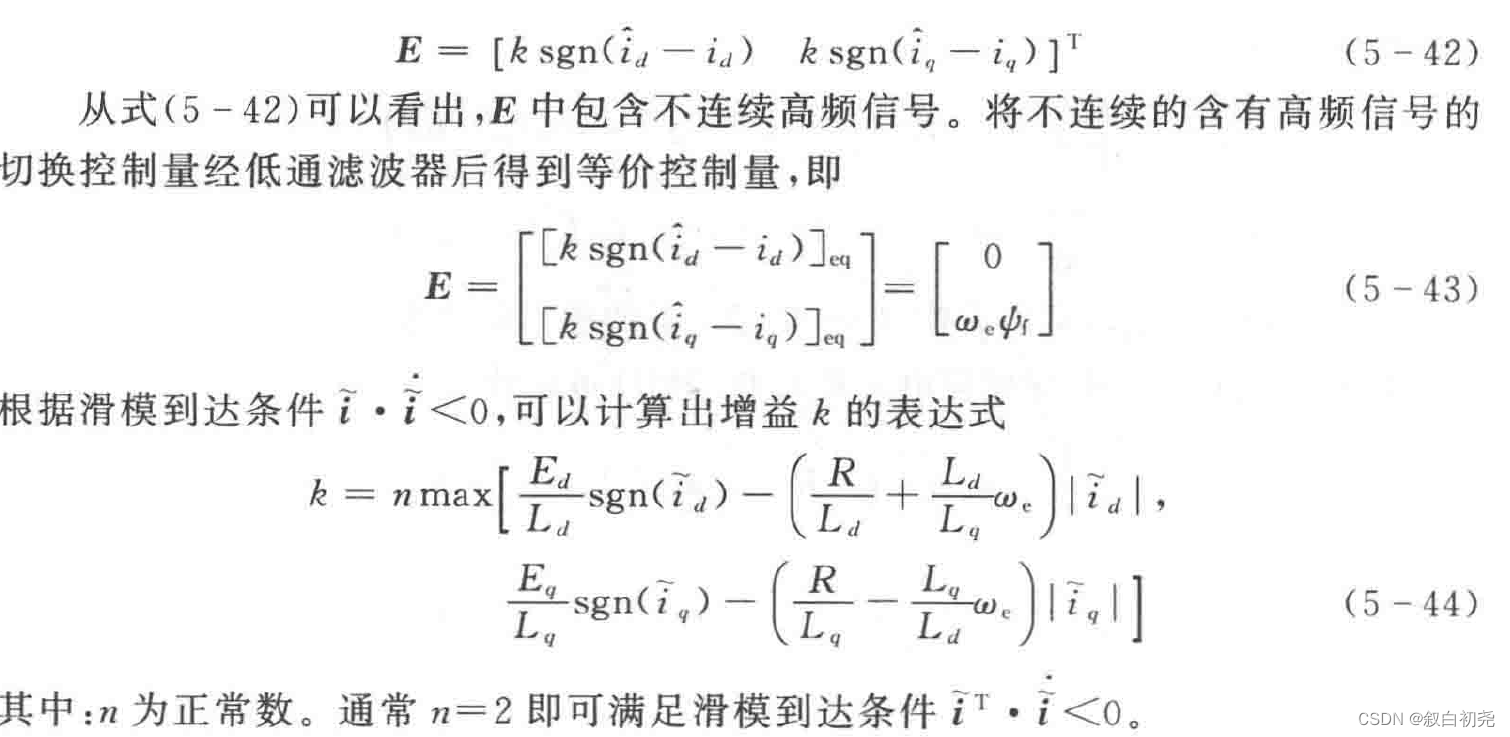
反电动势估计值用开关量代替,通过控制开关量使得定子电流观测值等于实际值,这样反电动势就与开关量相等,从而得到反电动势估计值。
如何使定子电流观测值趋向于实际值,这里就得采用滑膜控制,设计滑模面,暴力将状态变量拉到滑模面。
3.滑膜面选取
滑模面设计为
因此将滑膜观测器模型与参照数学模型做差。

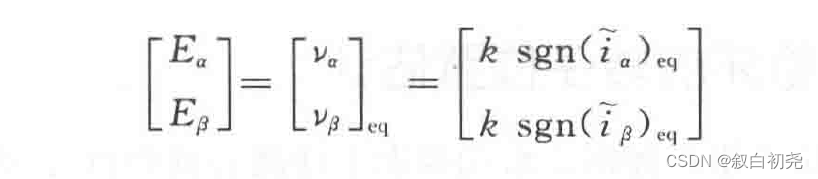
4.设计滑膜控制律

当到达滑模面后会有
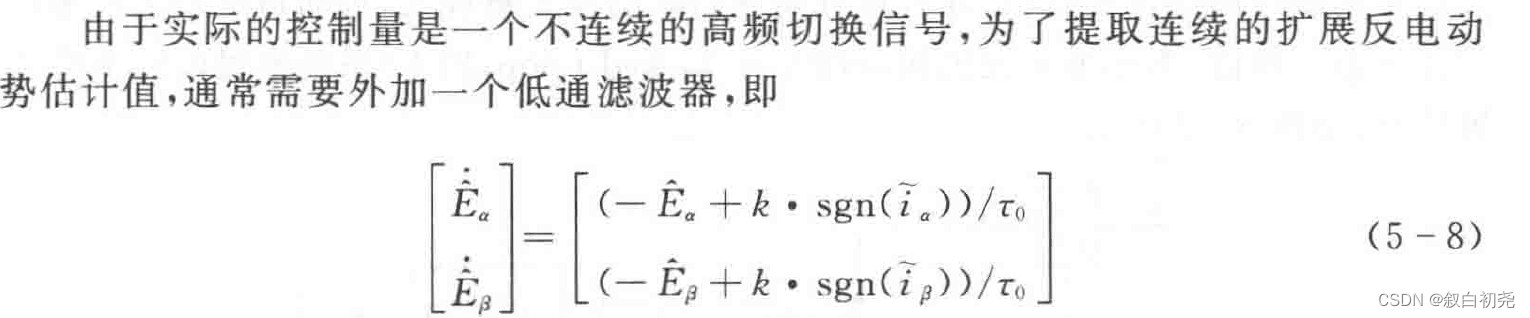
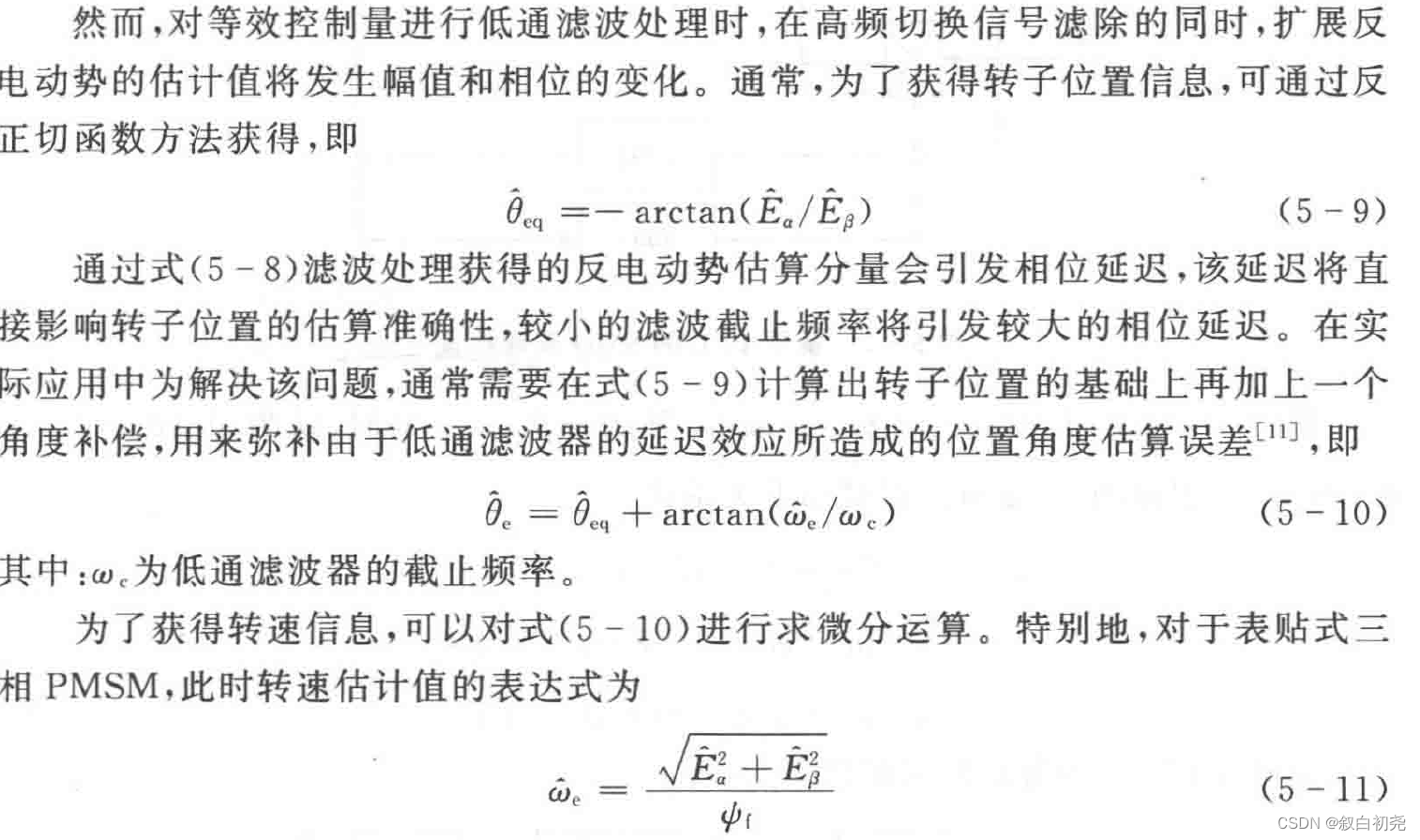
4.低通滤波器
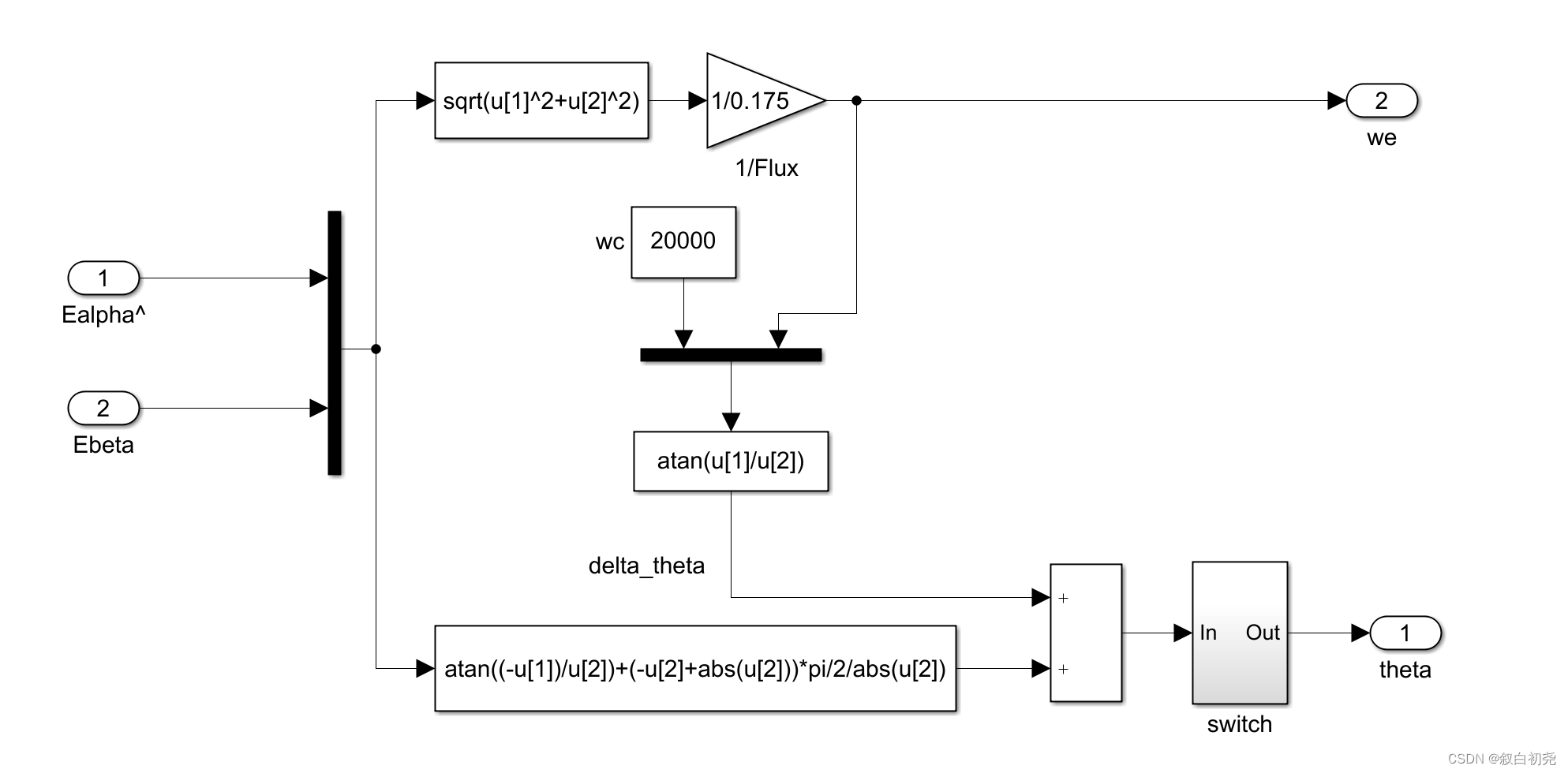
二、基于反正切函数的转子位置估计

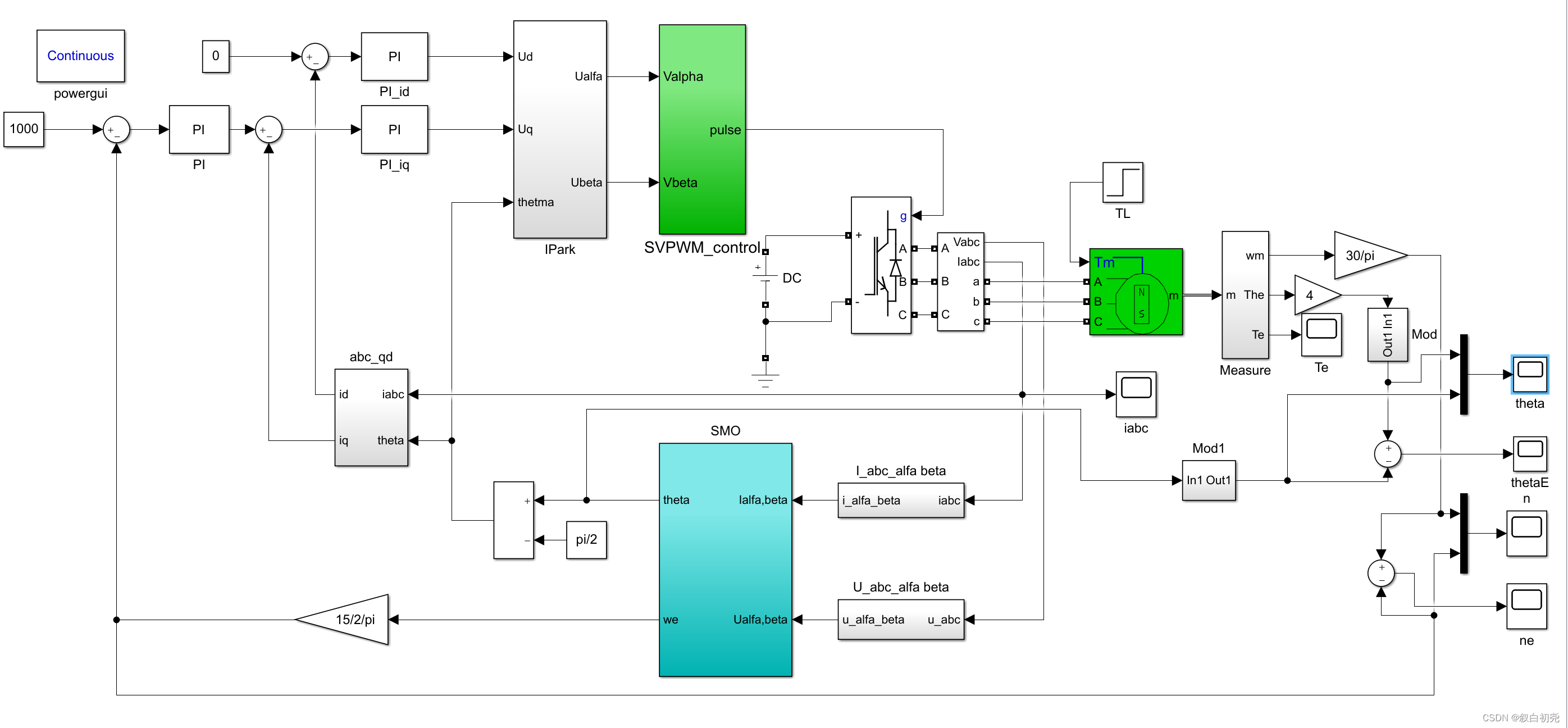
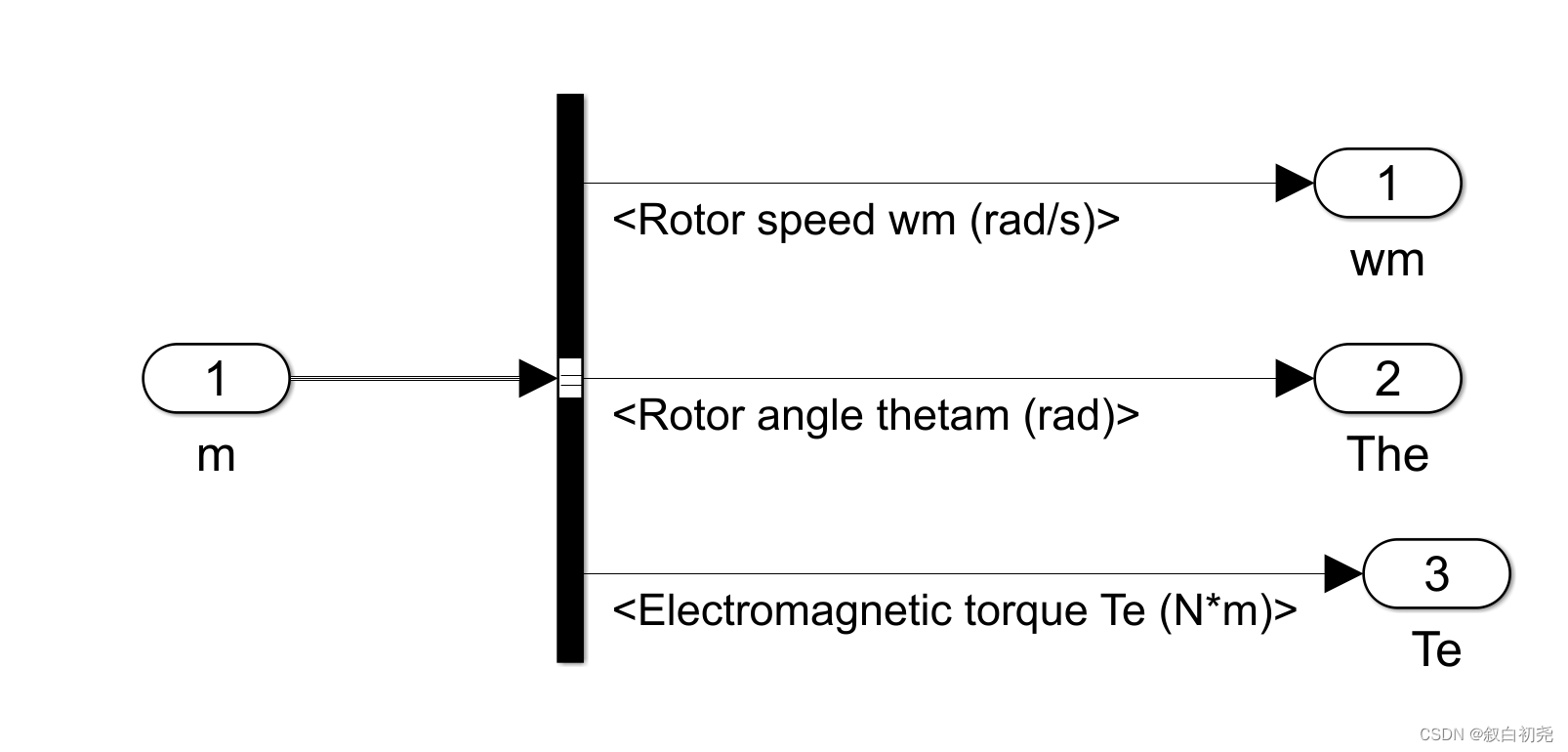
1.测量模块
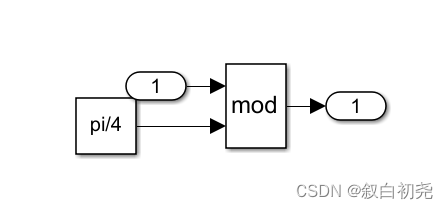
2.取余模块
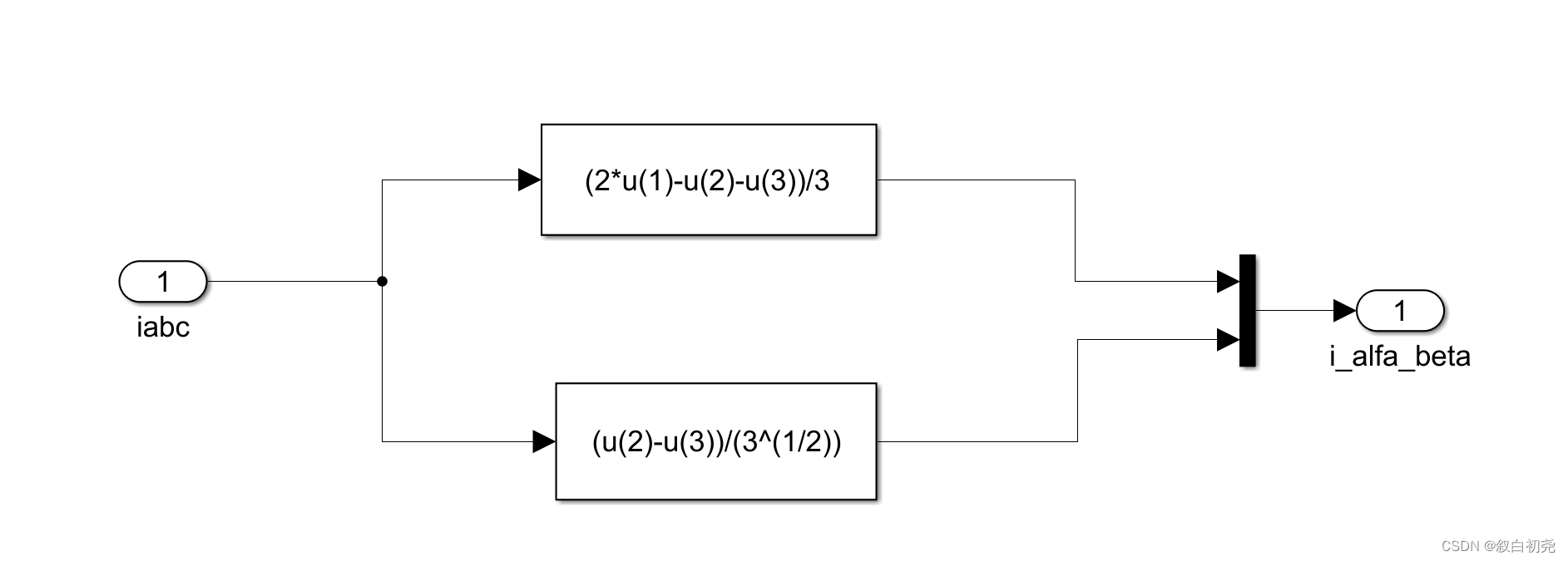
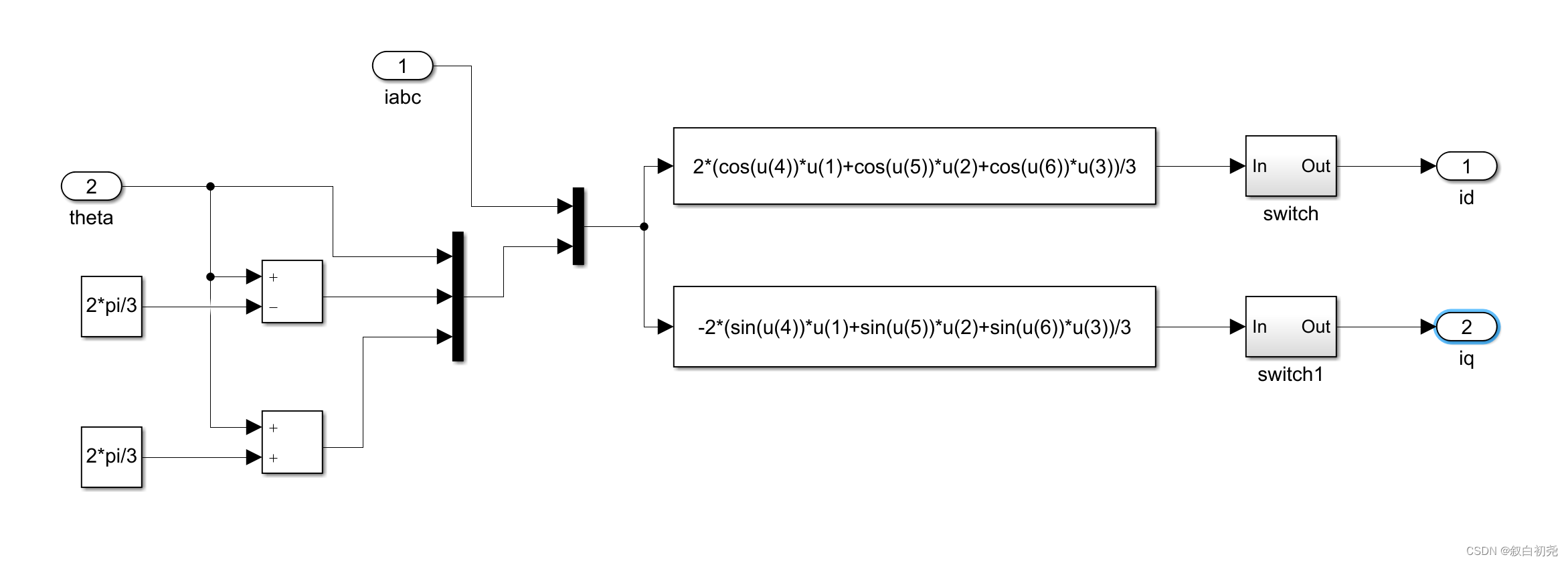
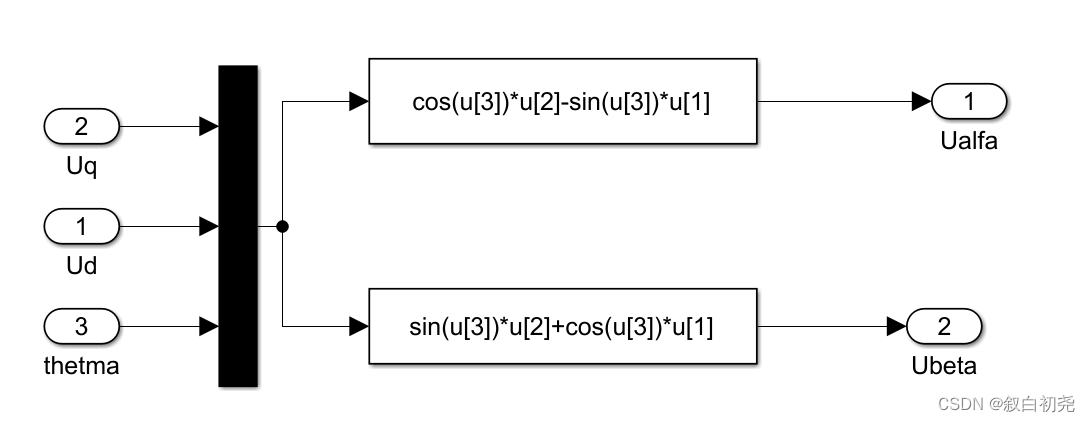
3.坐标变换
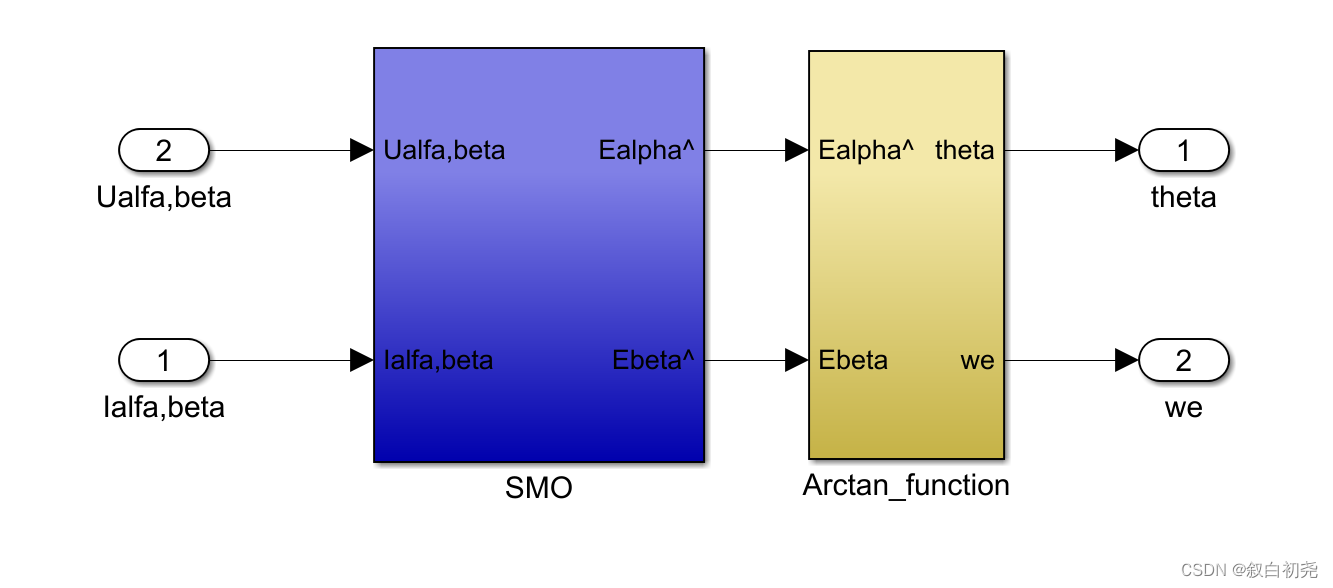
4.SMO
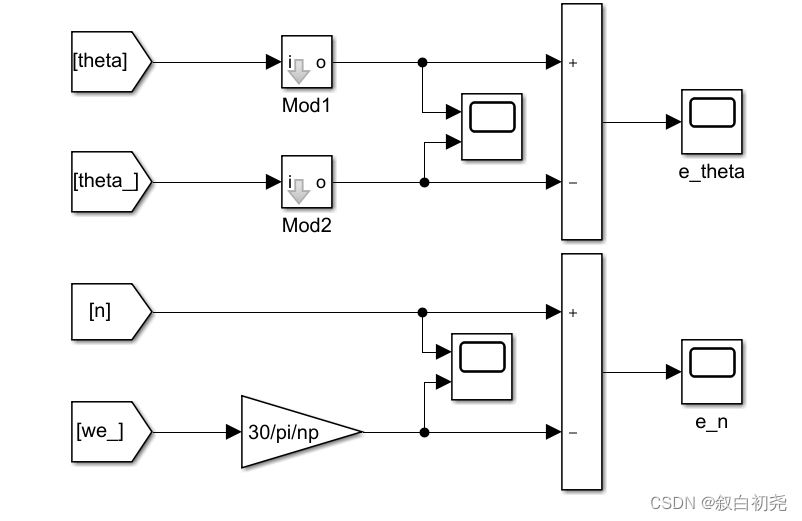
5.误差
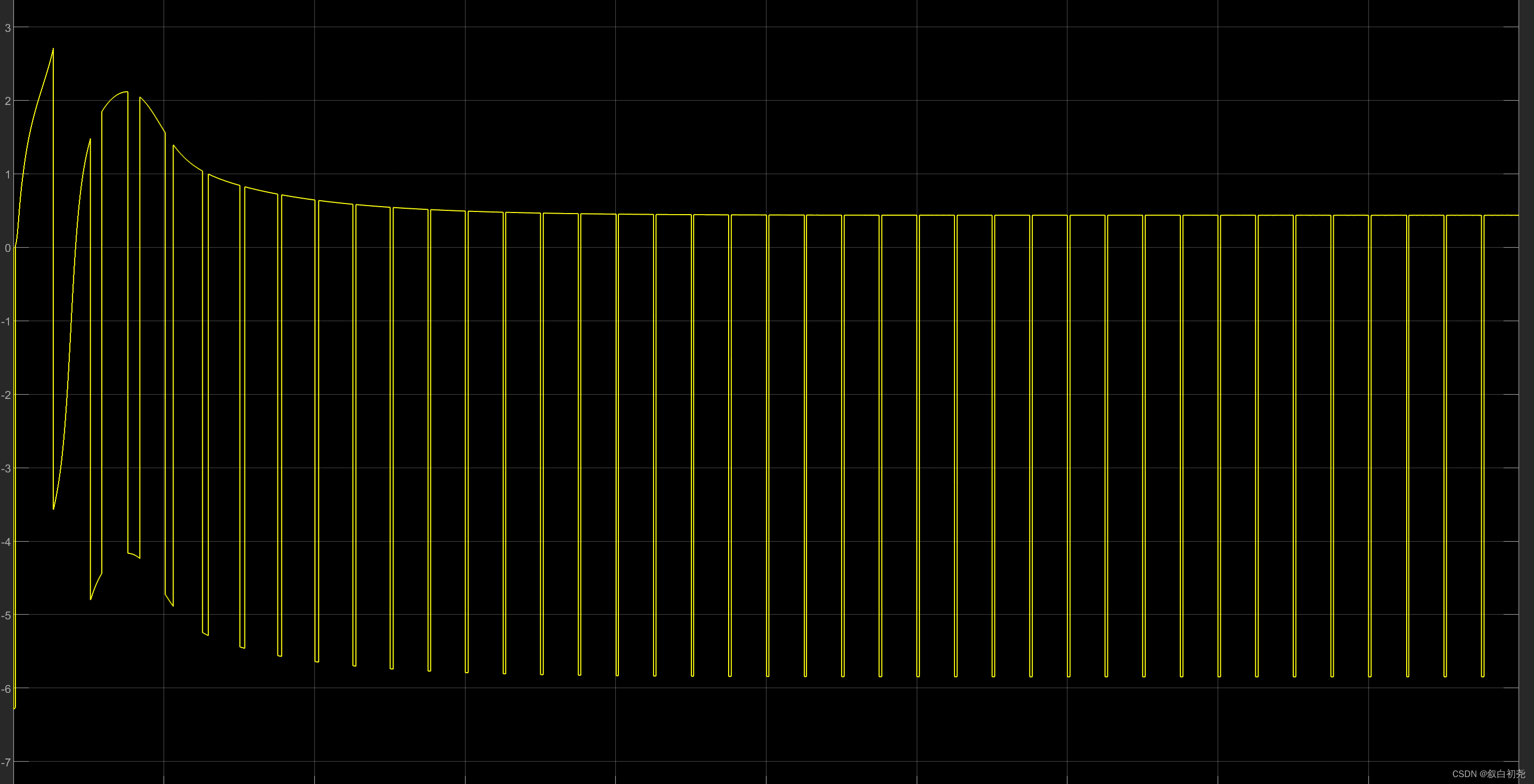
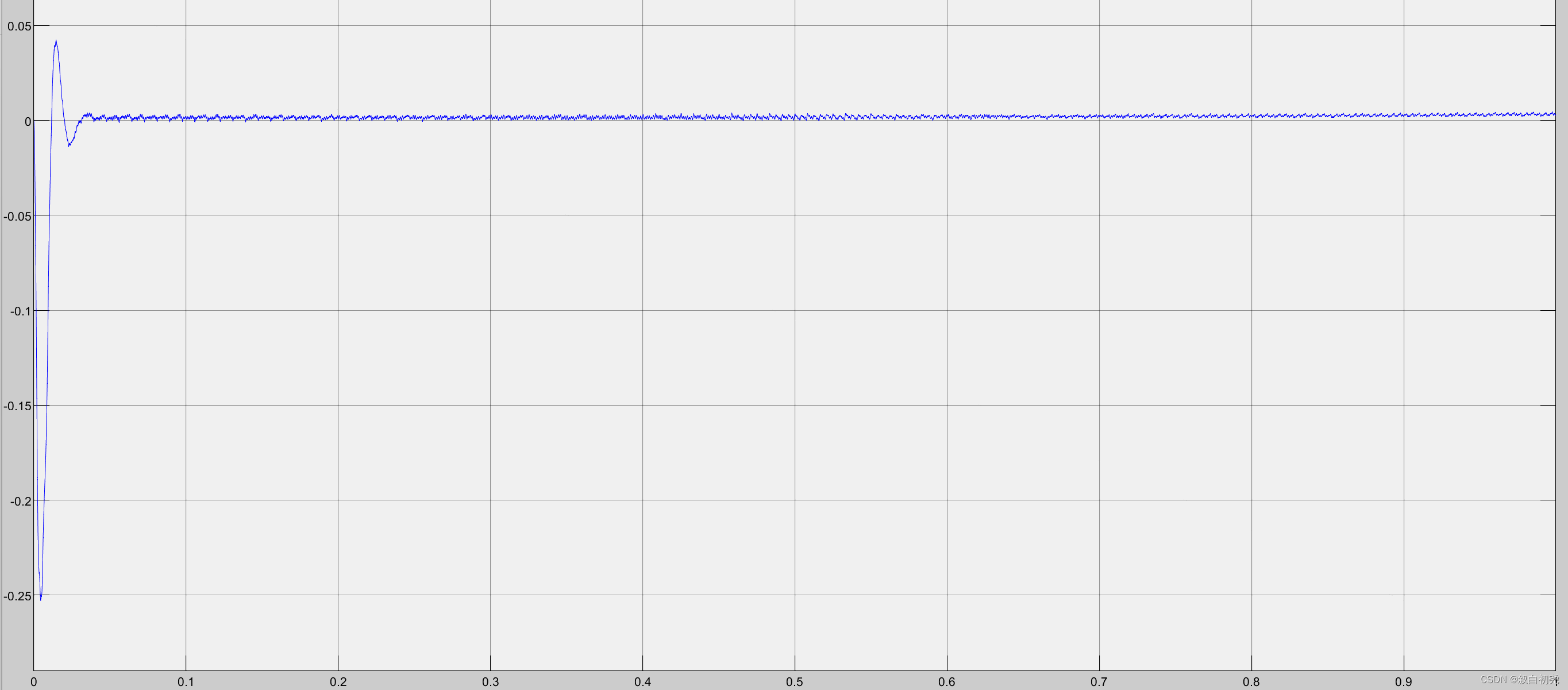
角度误差
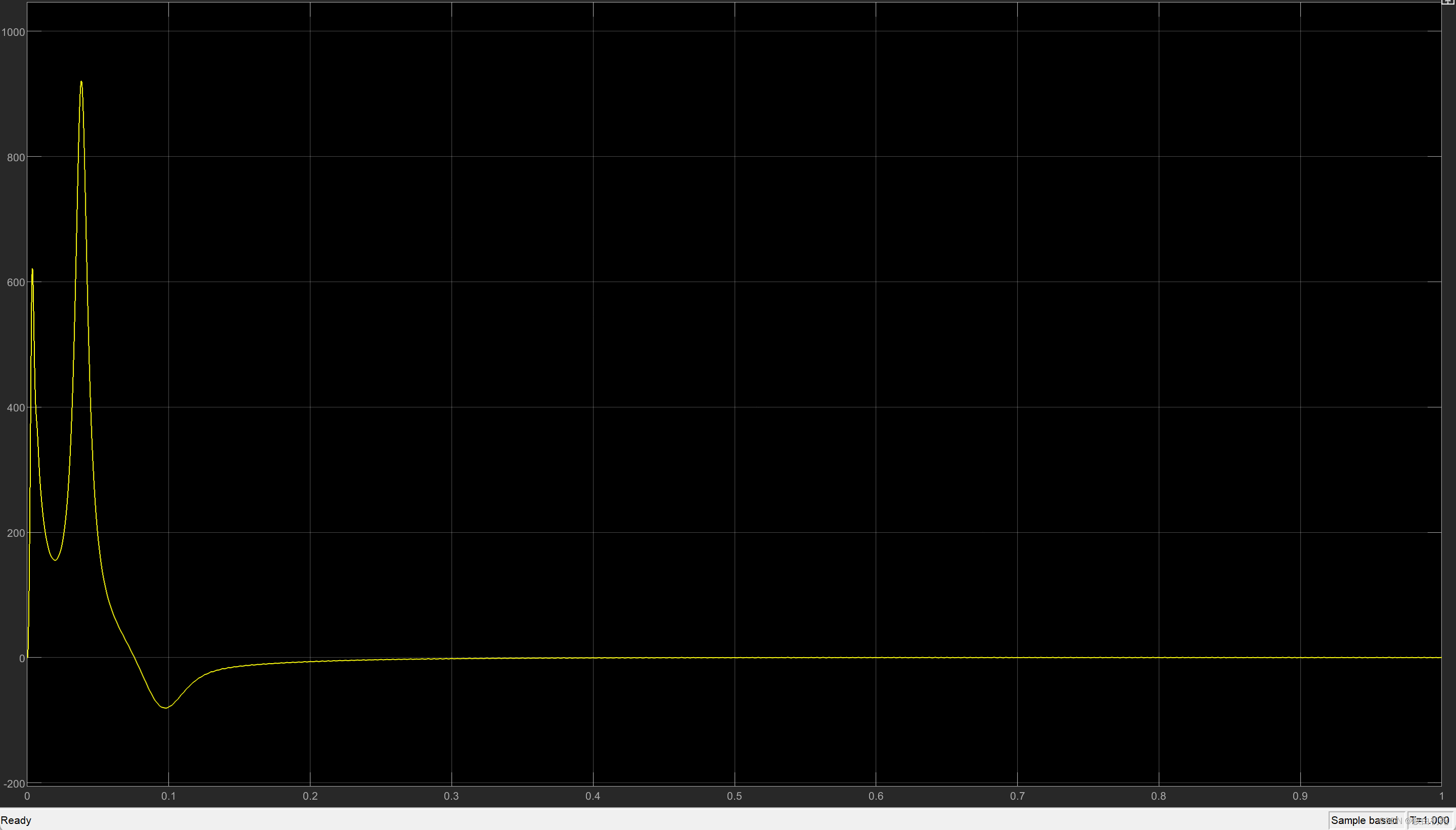
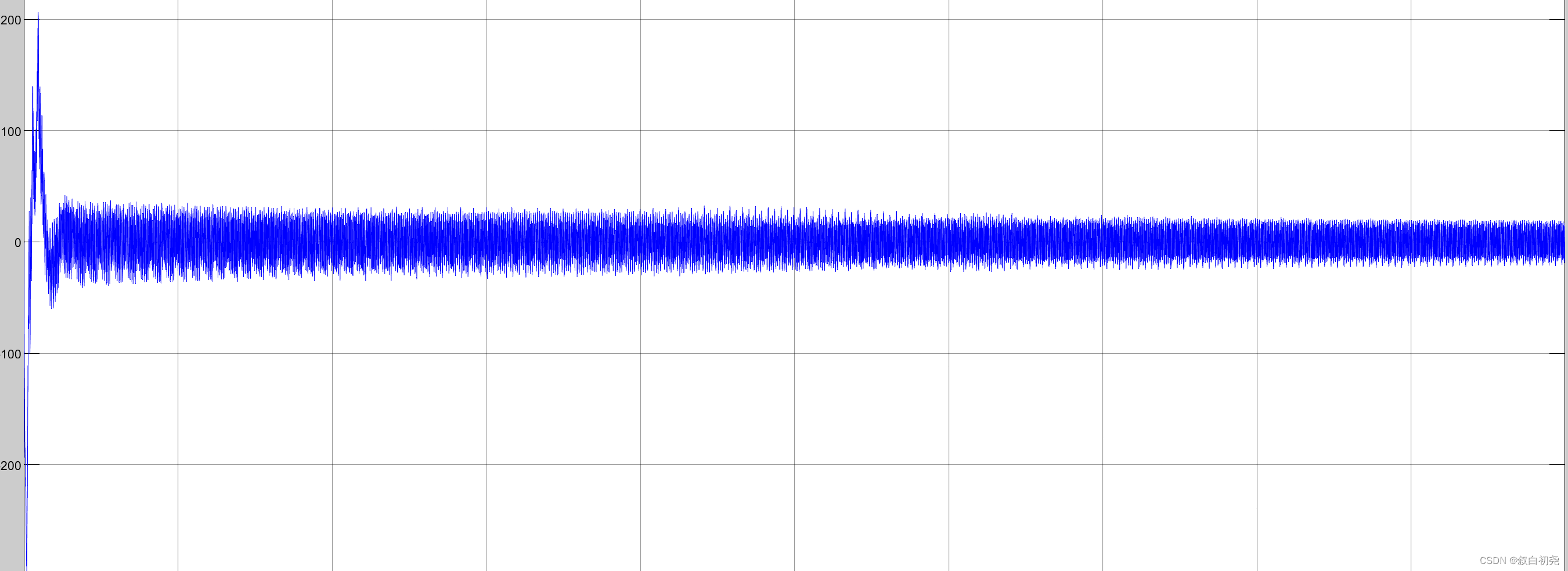
转速误差
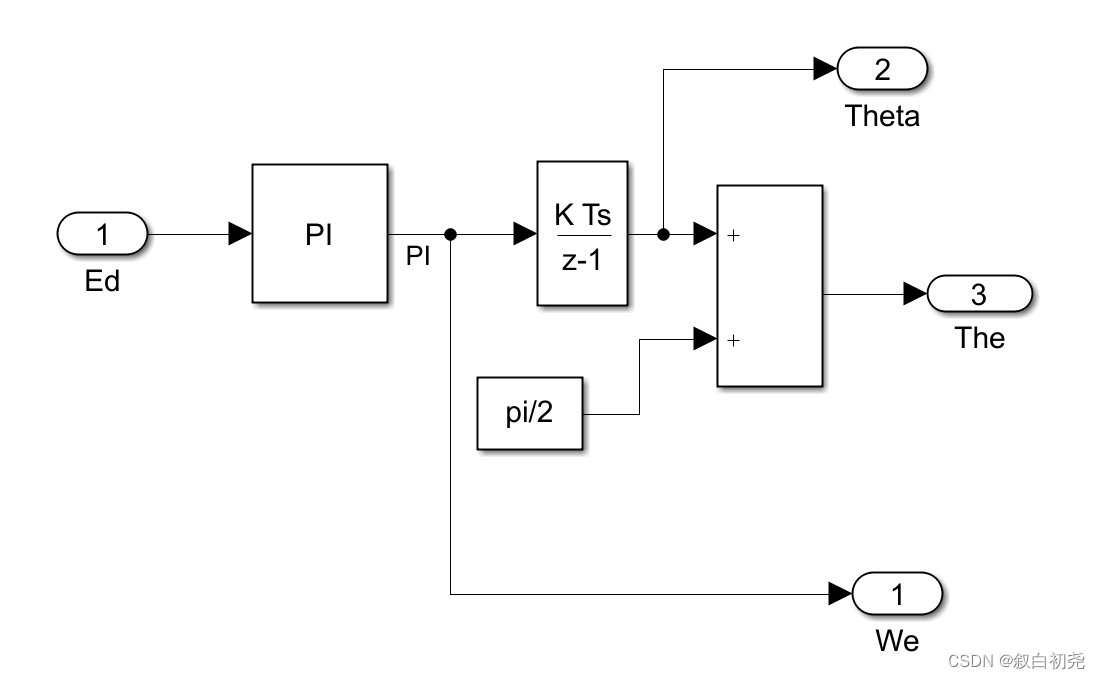
2.基于PLL锁相环的转子位置估计
估算的反电动势中存在抖动,结经过反正切函数会将这种抖动放大。
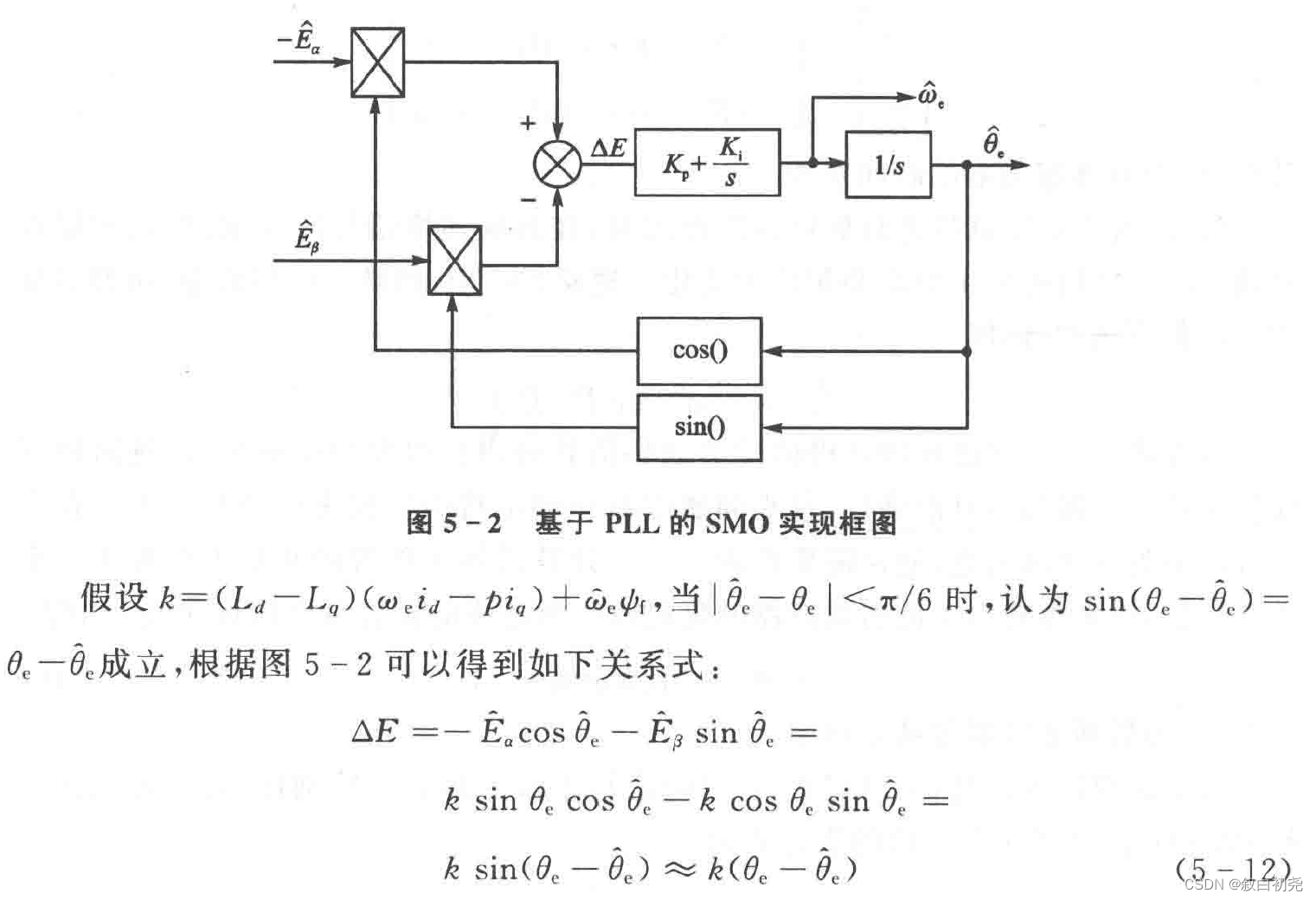
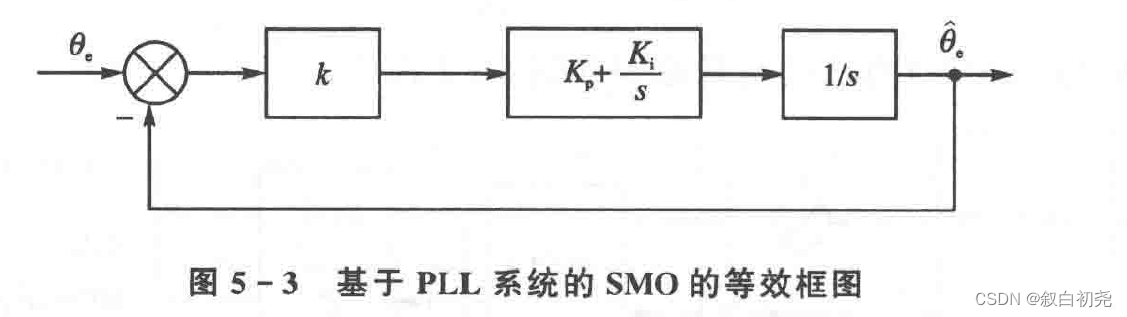
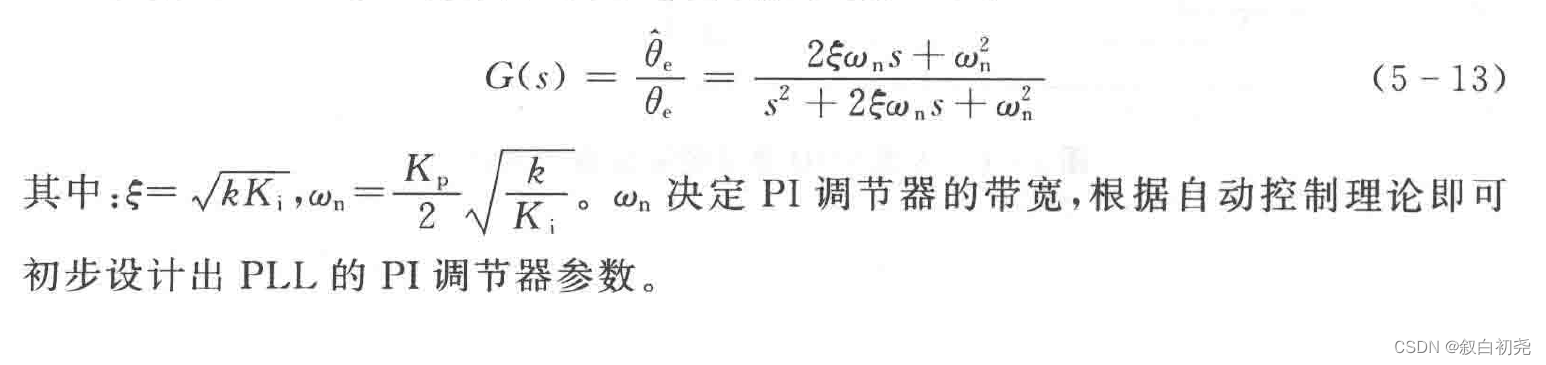
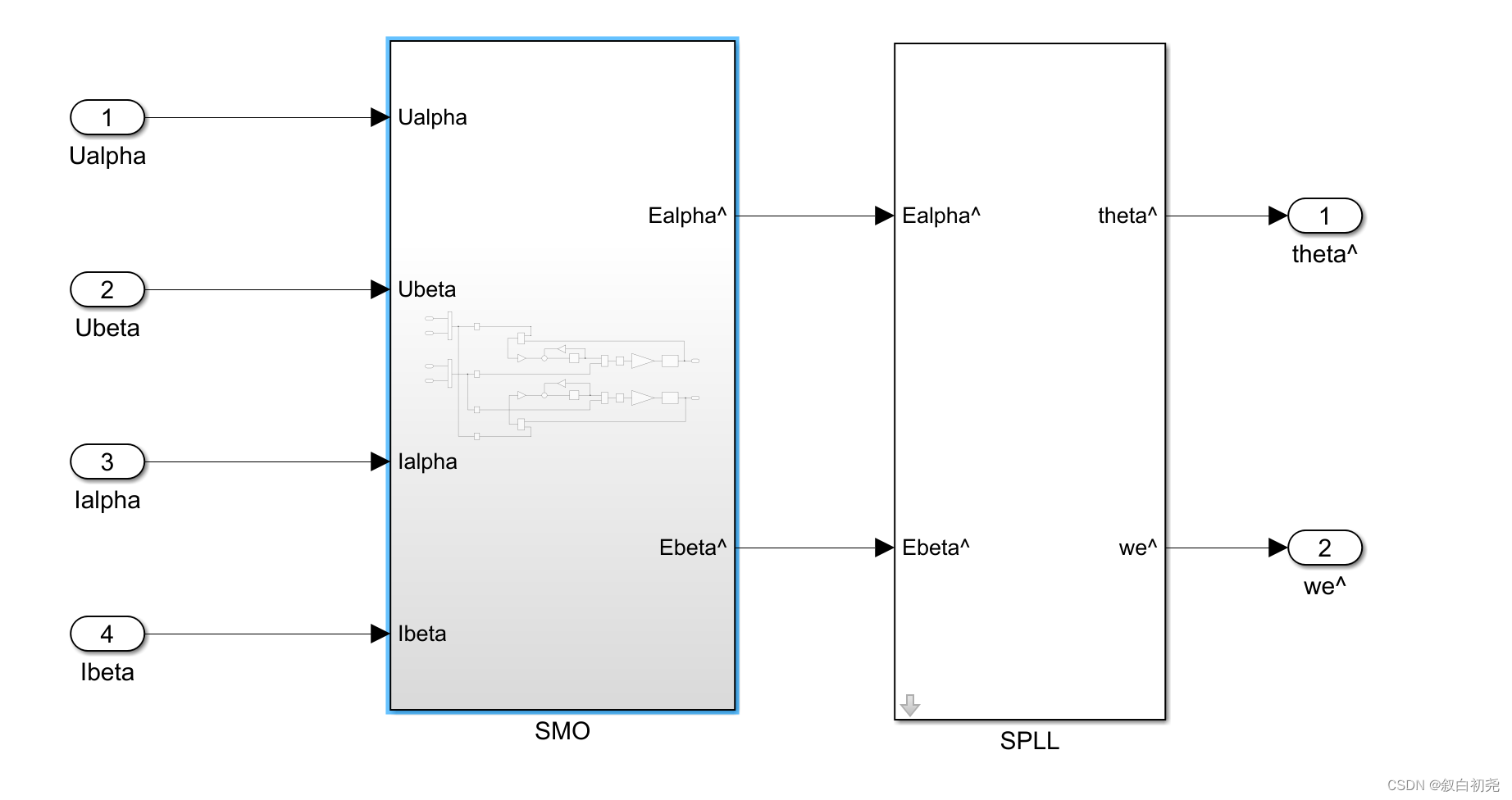
可将上图等效为下图
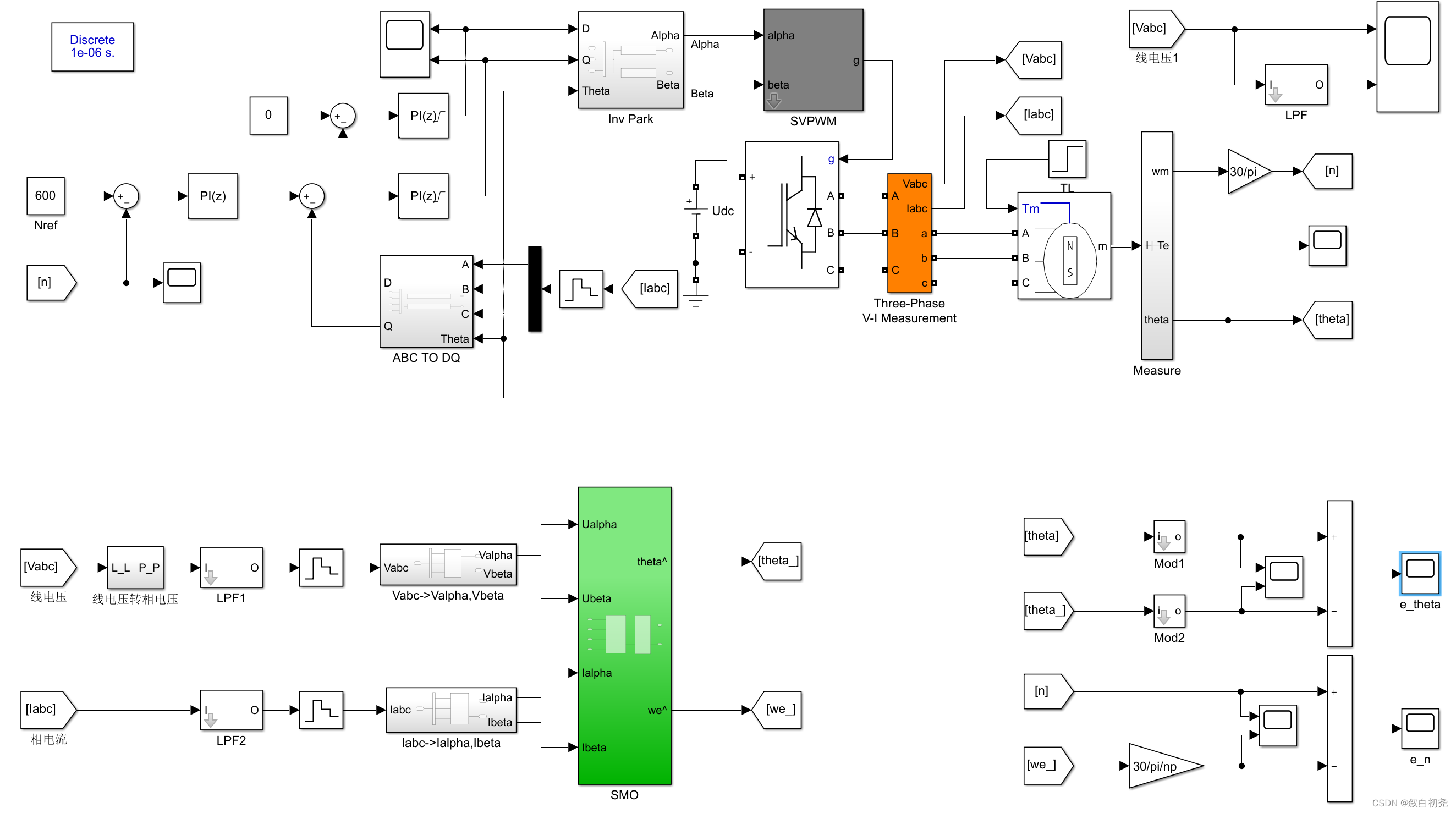
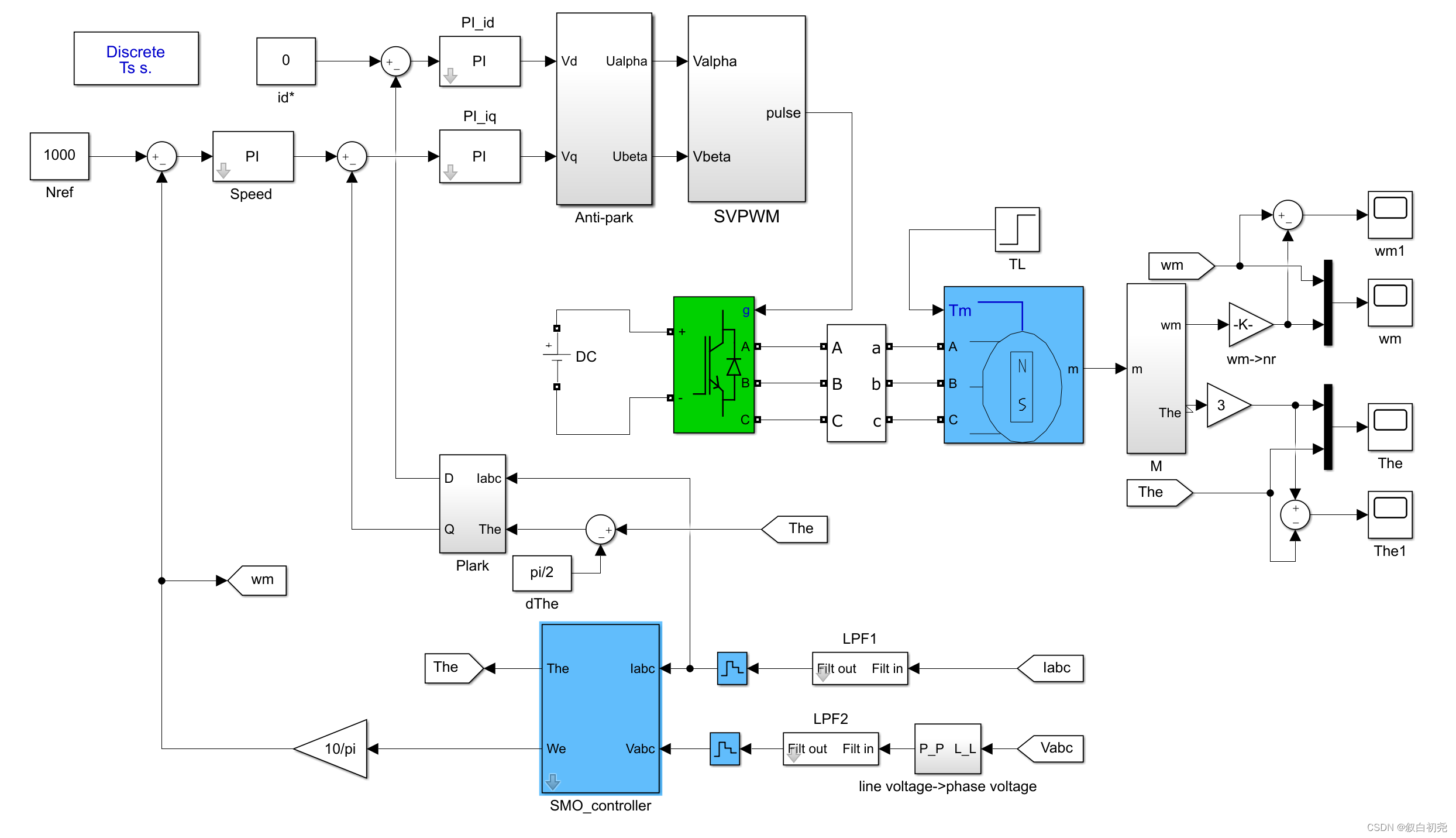
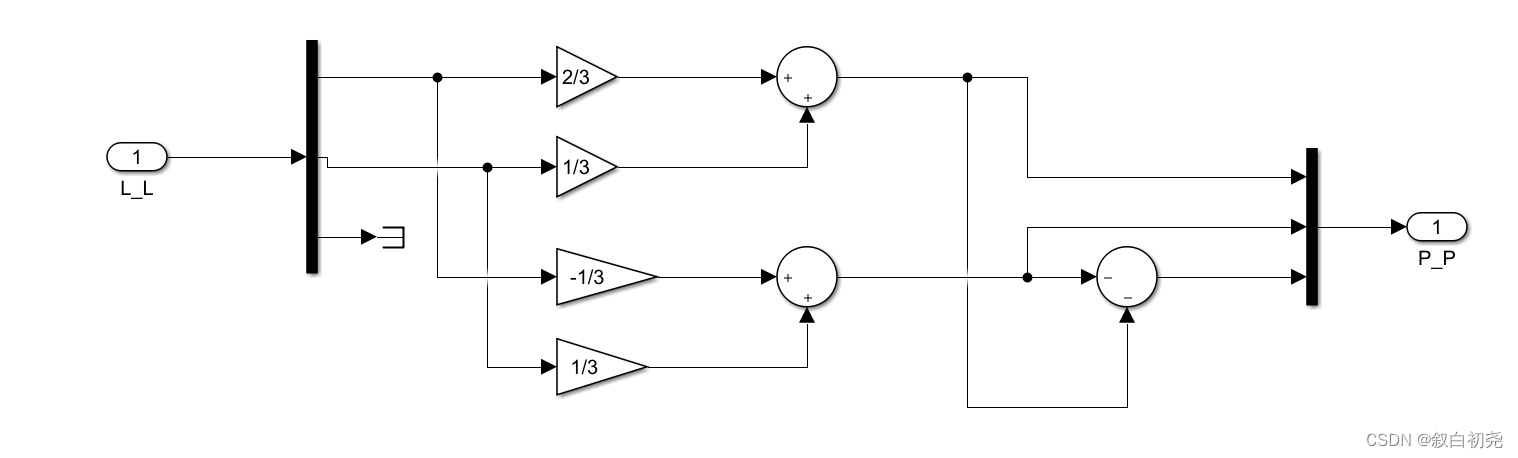
Three-Phase V-I Measurement
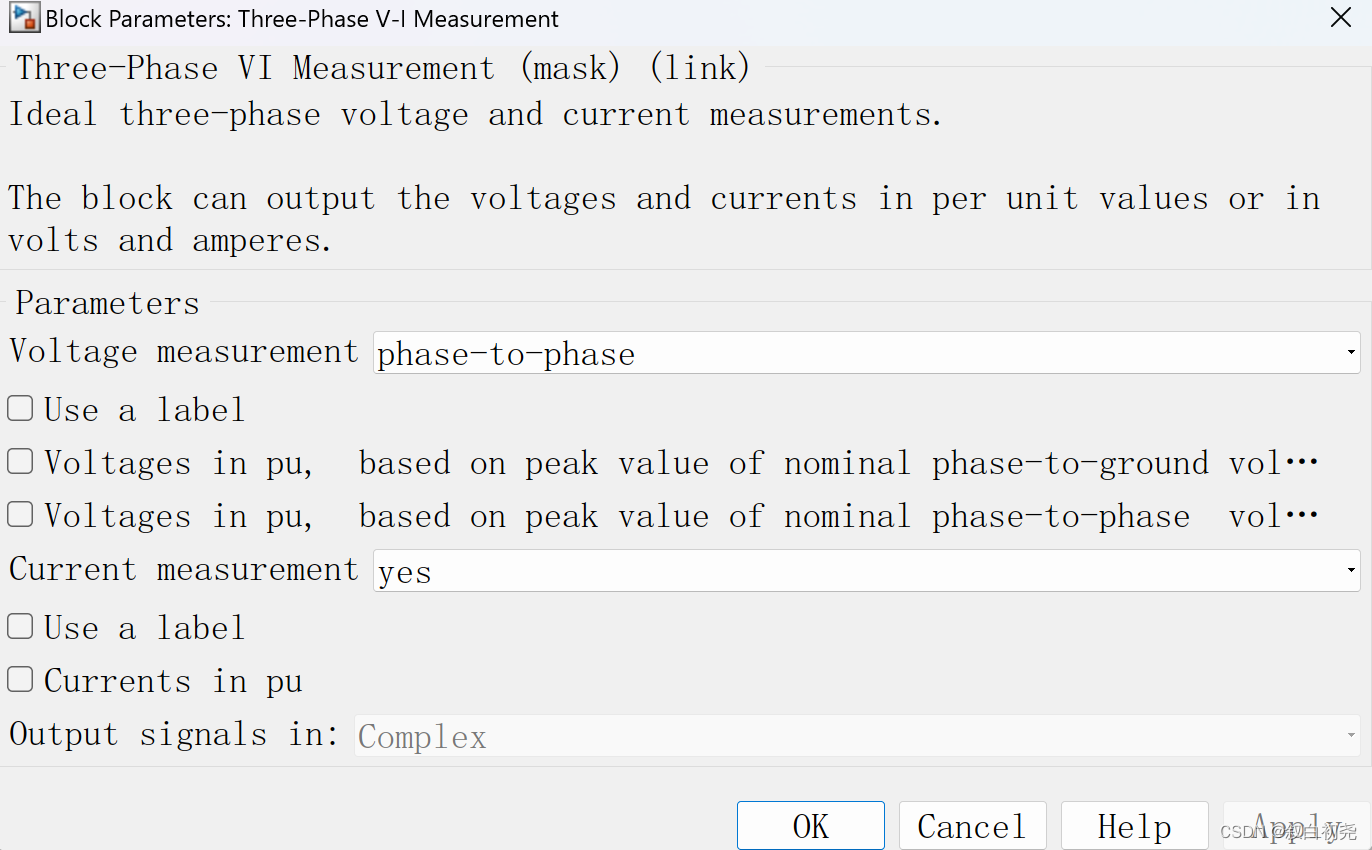
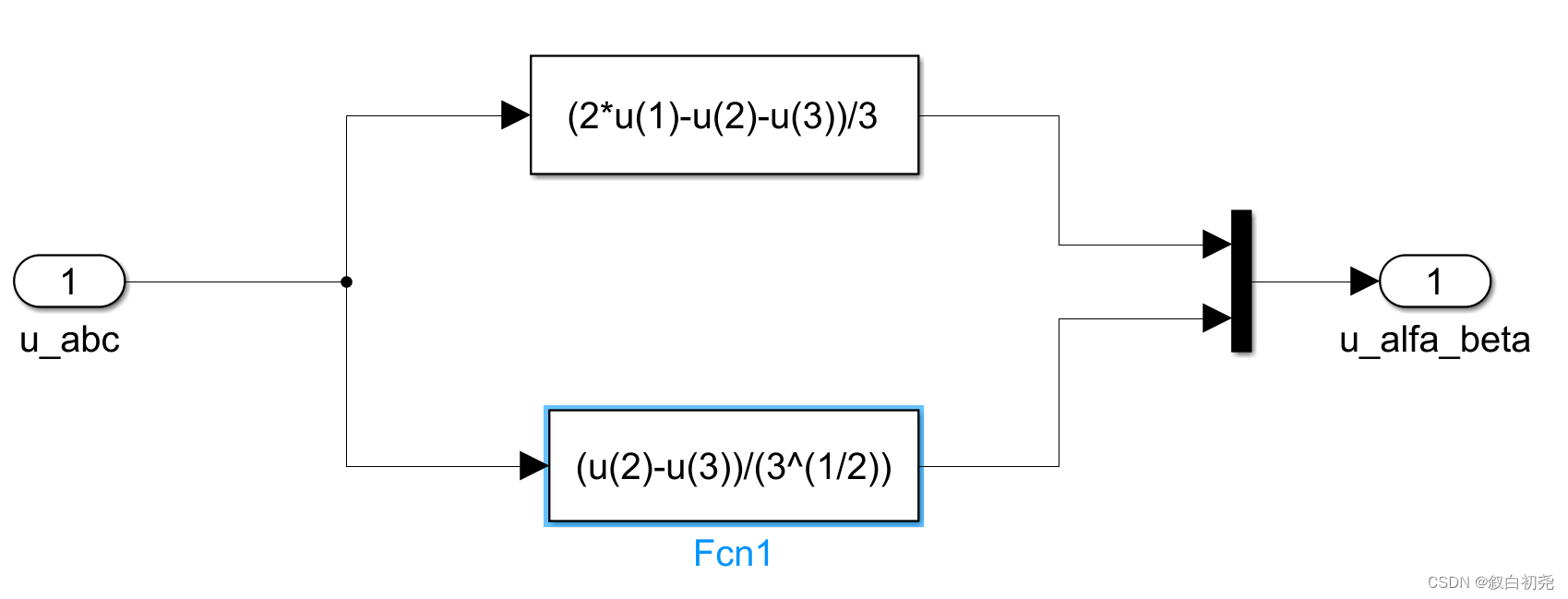
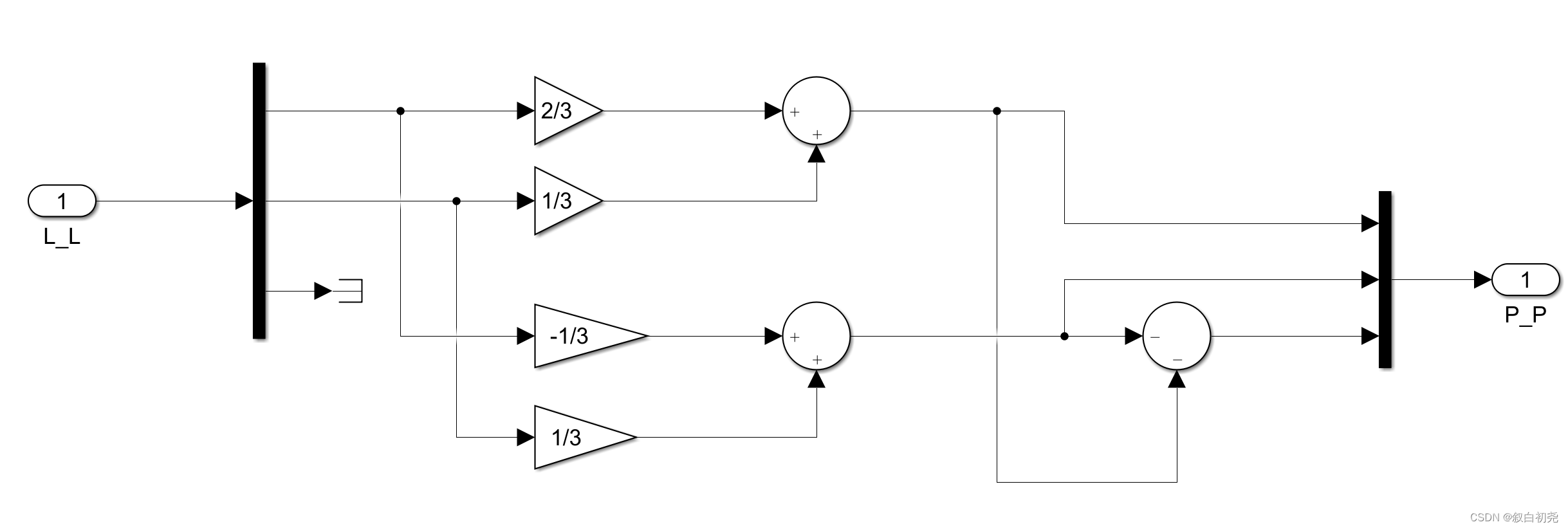
测量的是线电压和相电流,因此需要将线电压转为相电压。
(线电压转相电压)
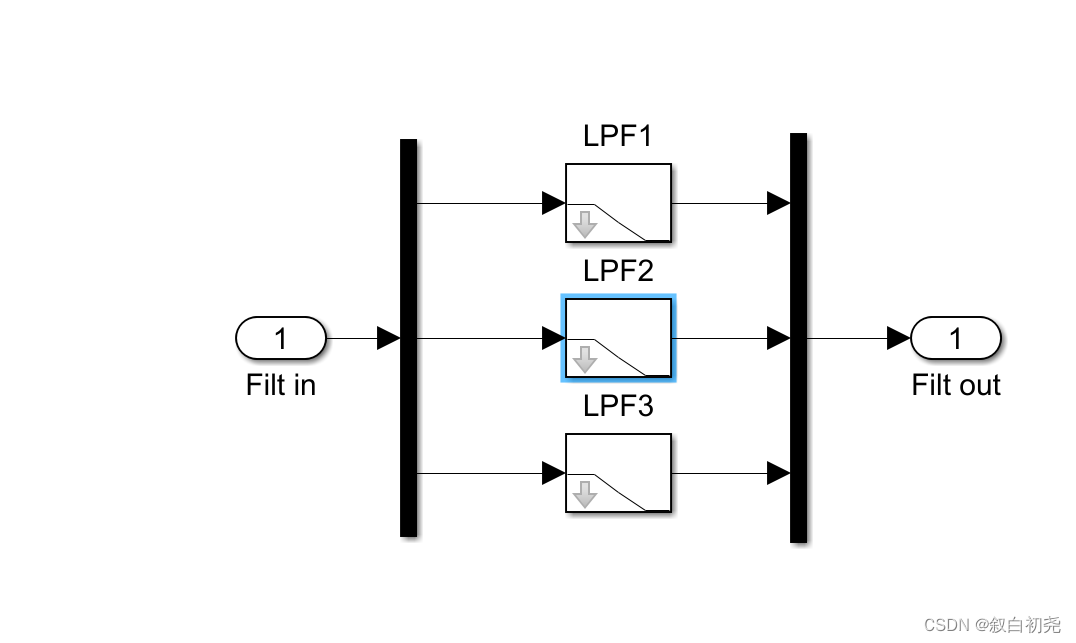
低通滤波器(三相)
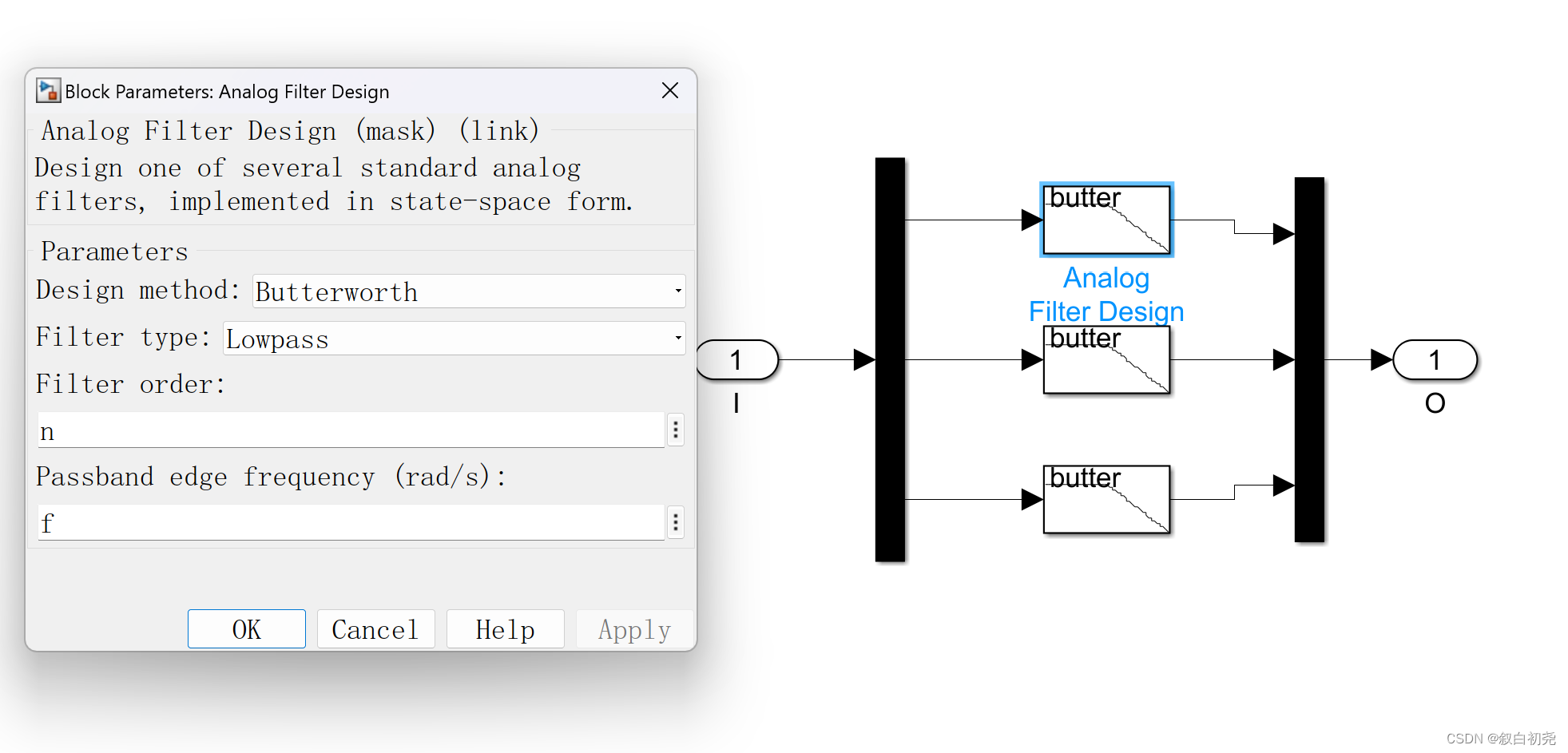
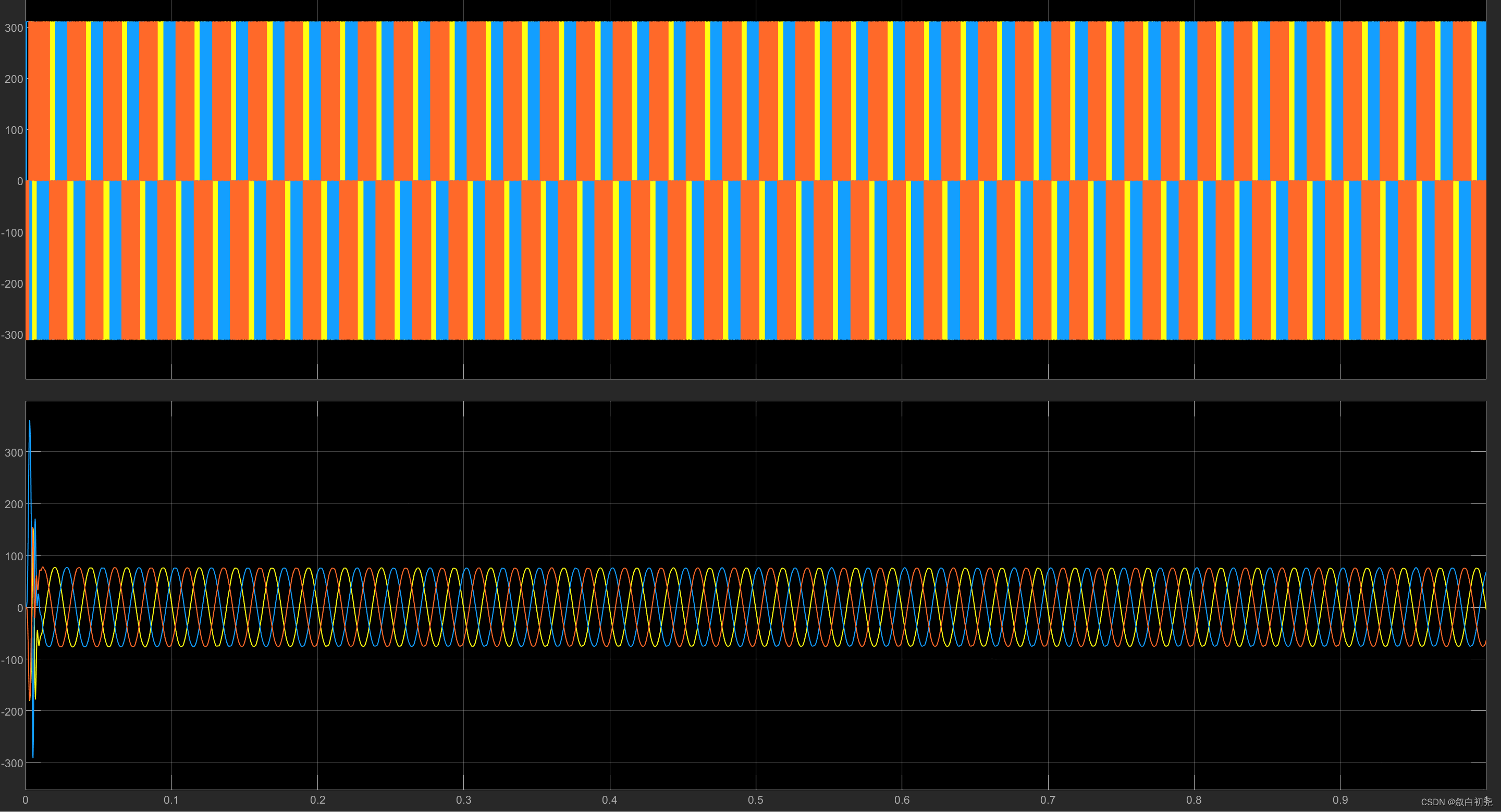
采用滤波器的效果
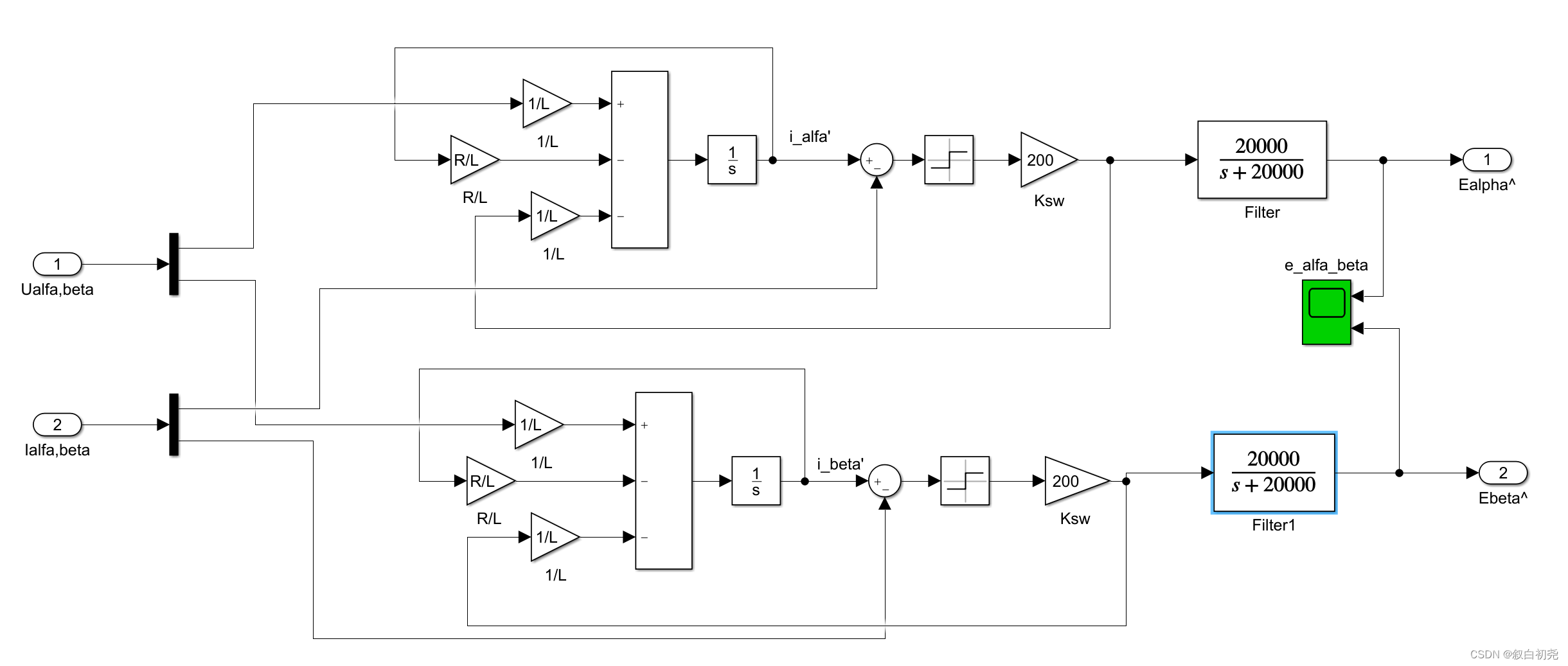
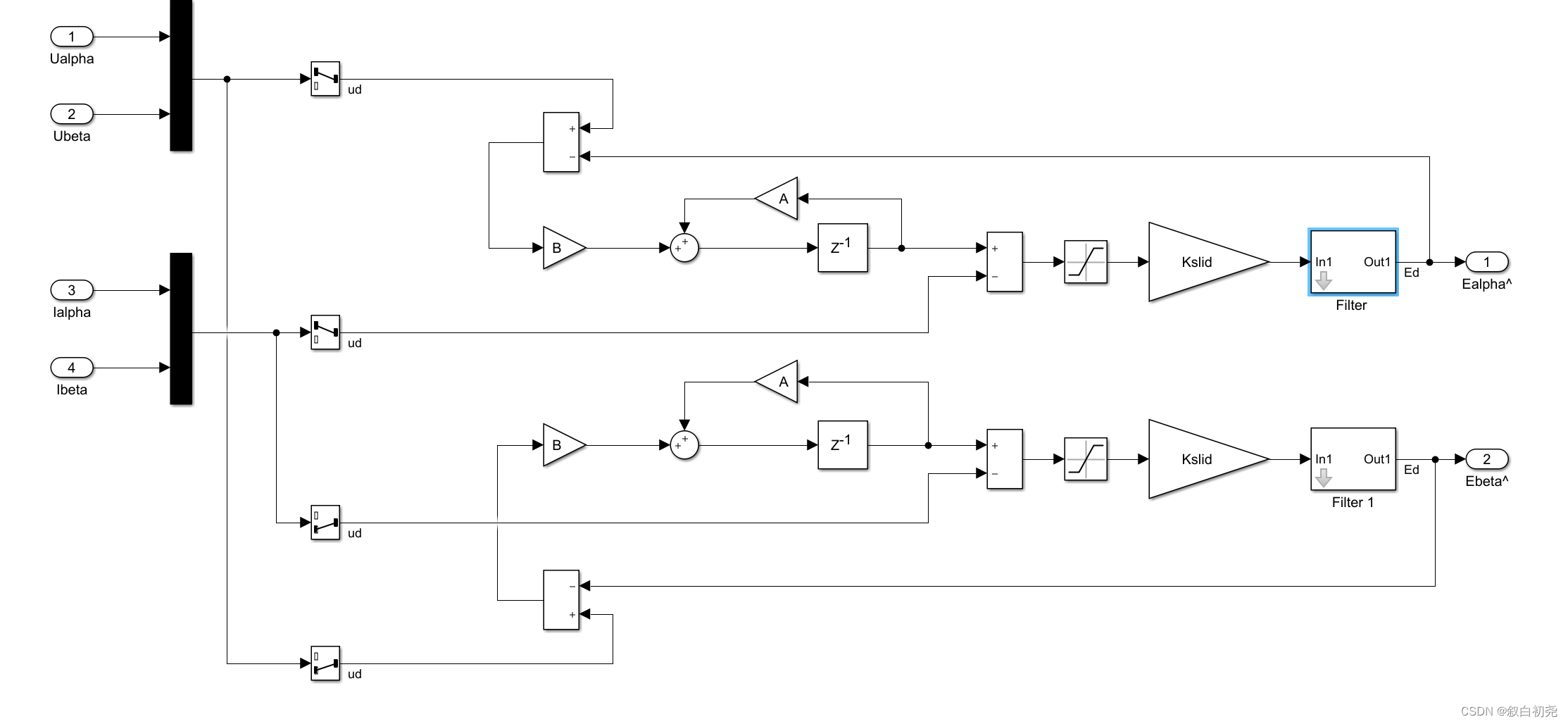
SMO
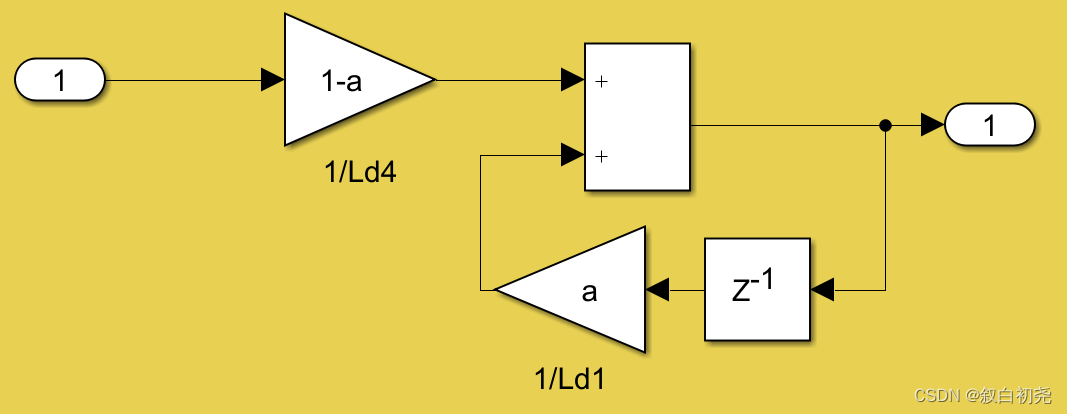
离散低通滤波器
比较误差(角度取余2*pi)
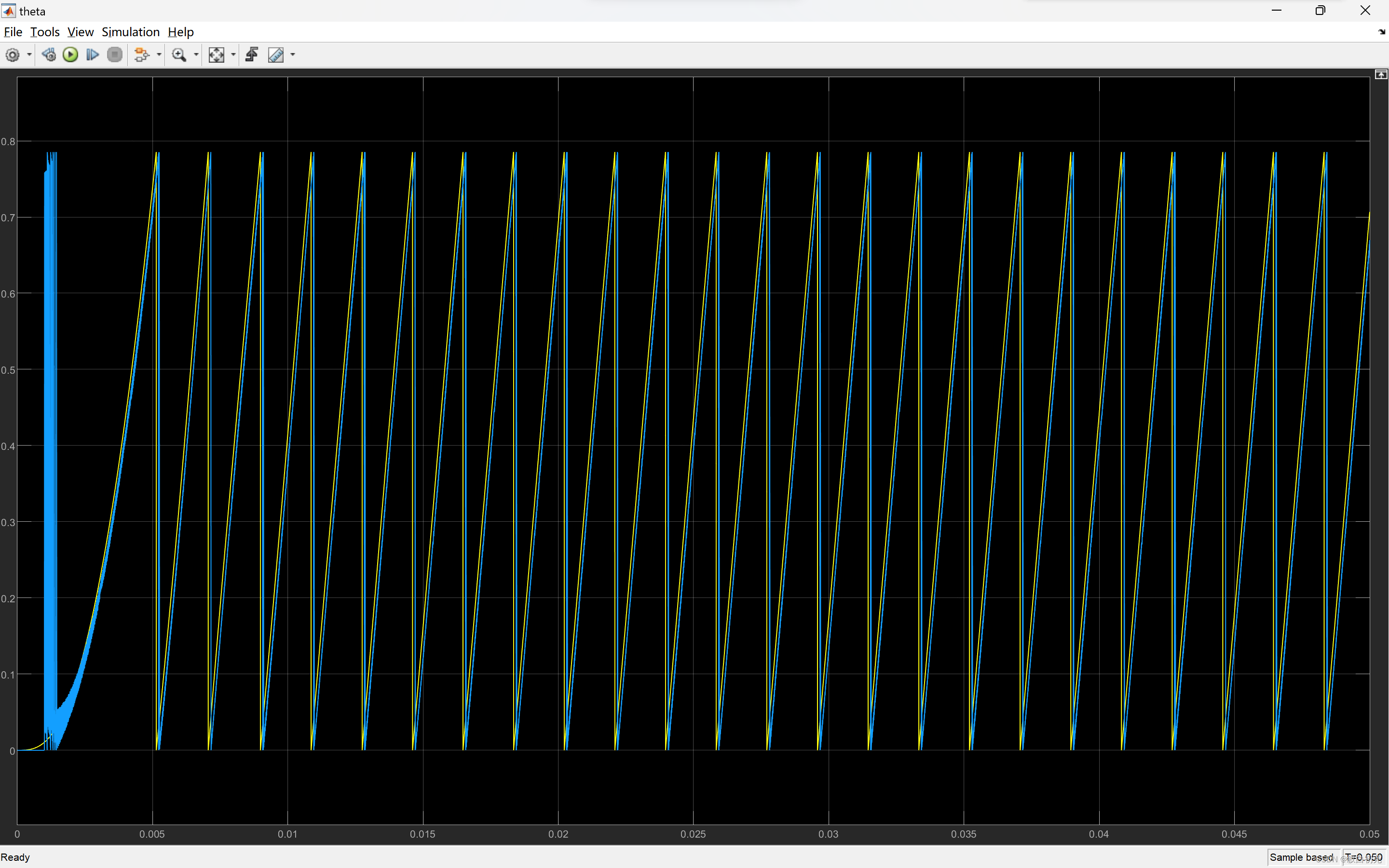
theta


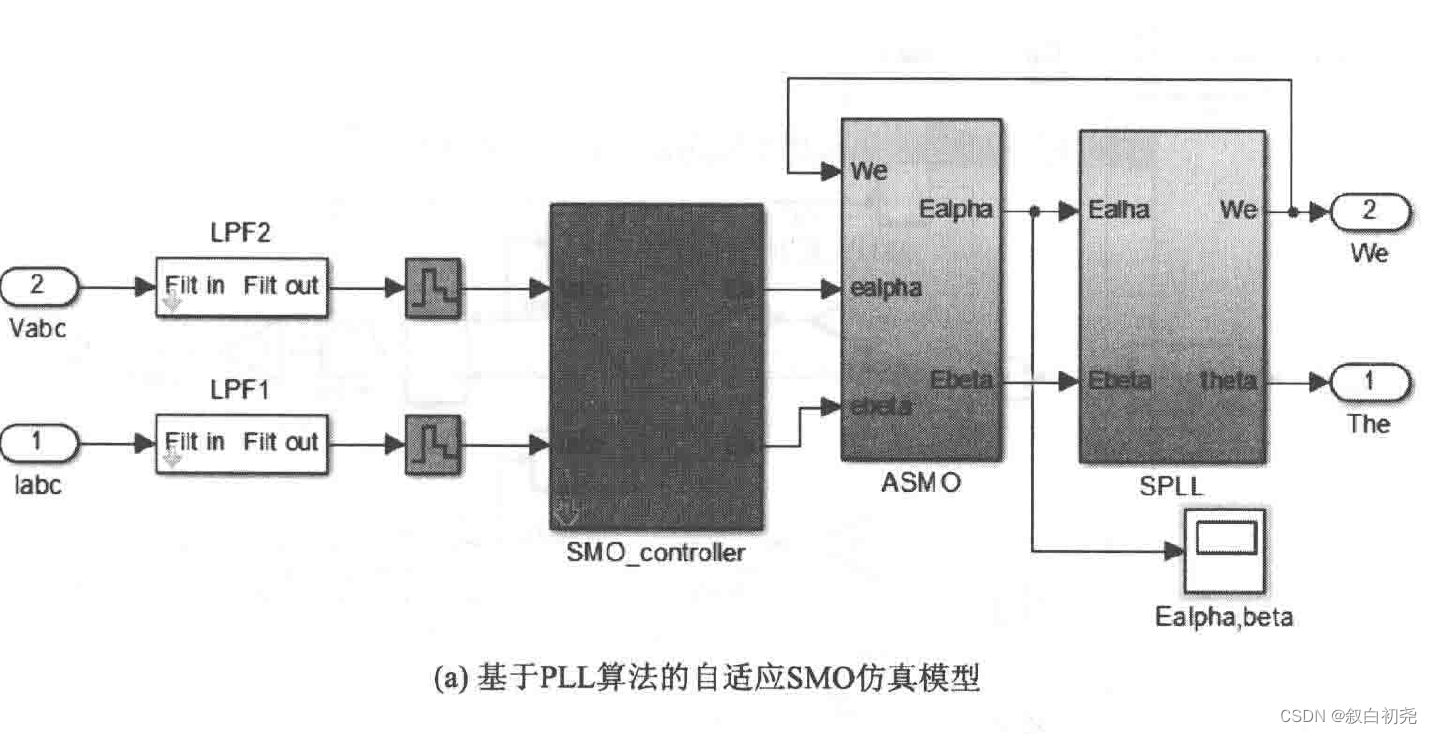
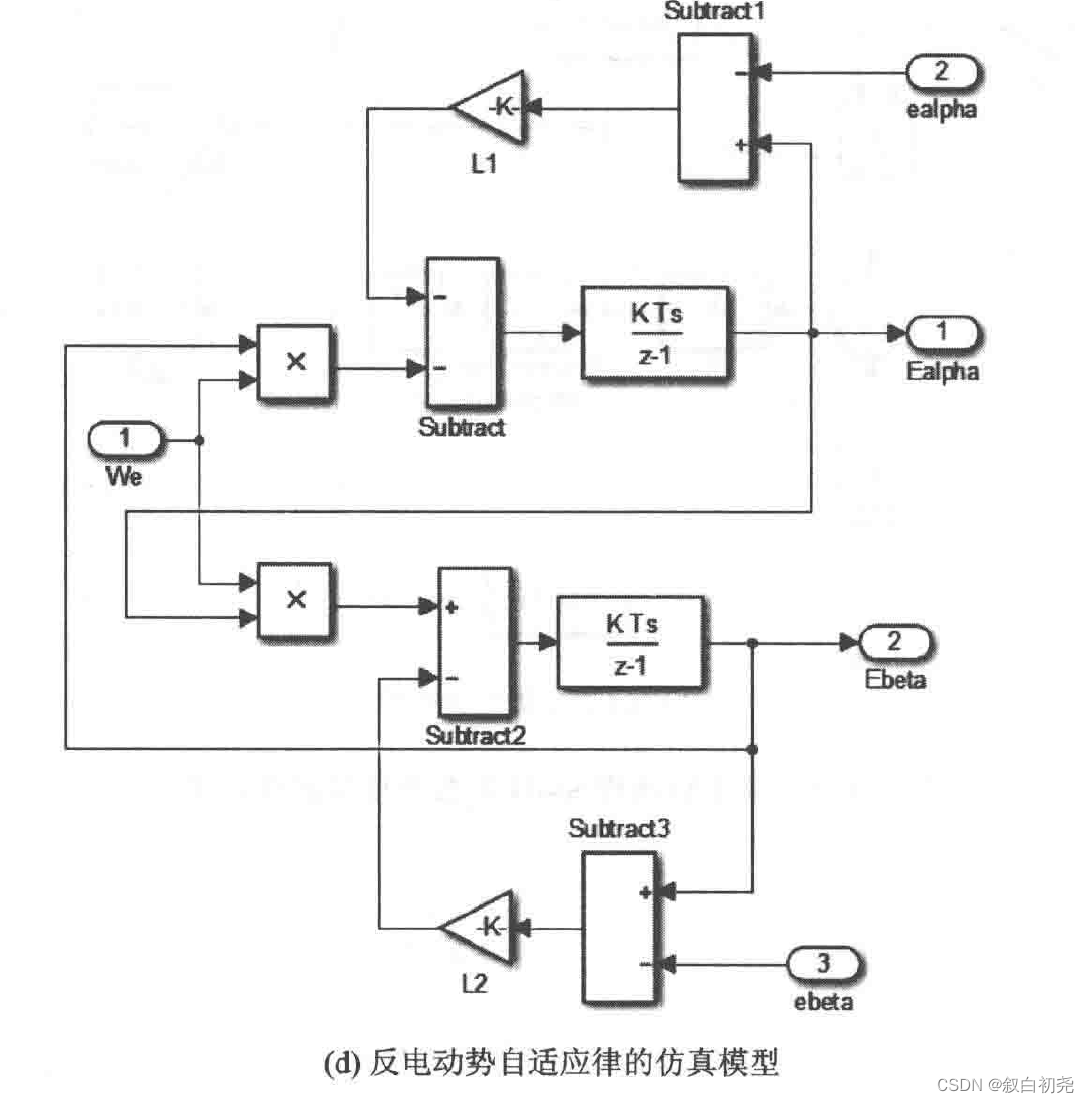
三、自适应滑膜观测器算法
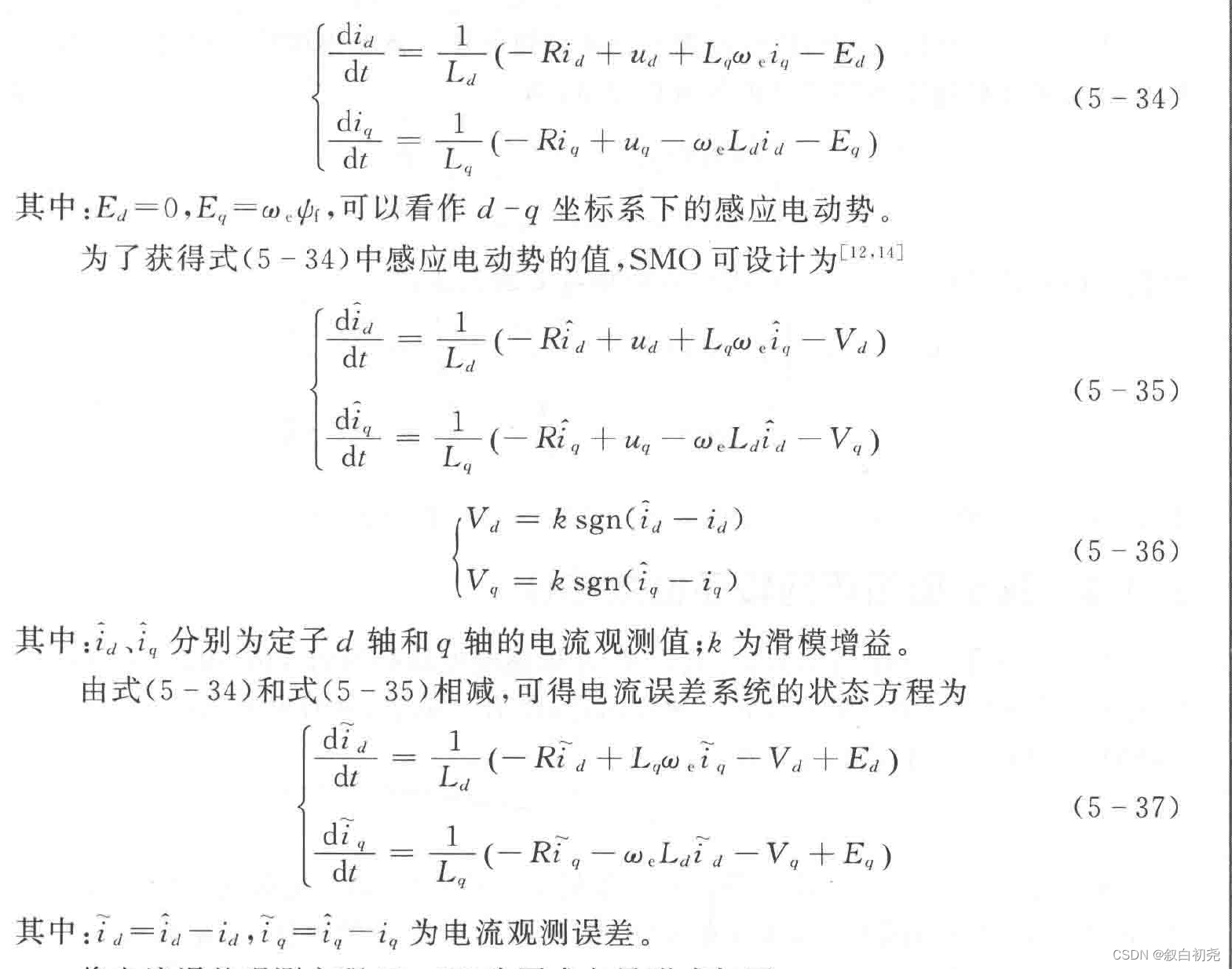
四、dq坐标系下的滑膜观测器
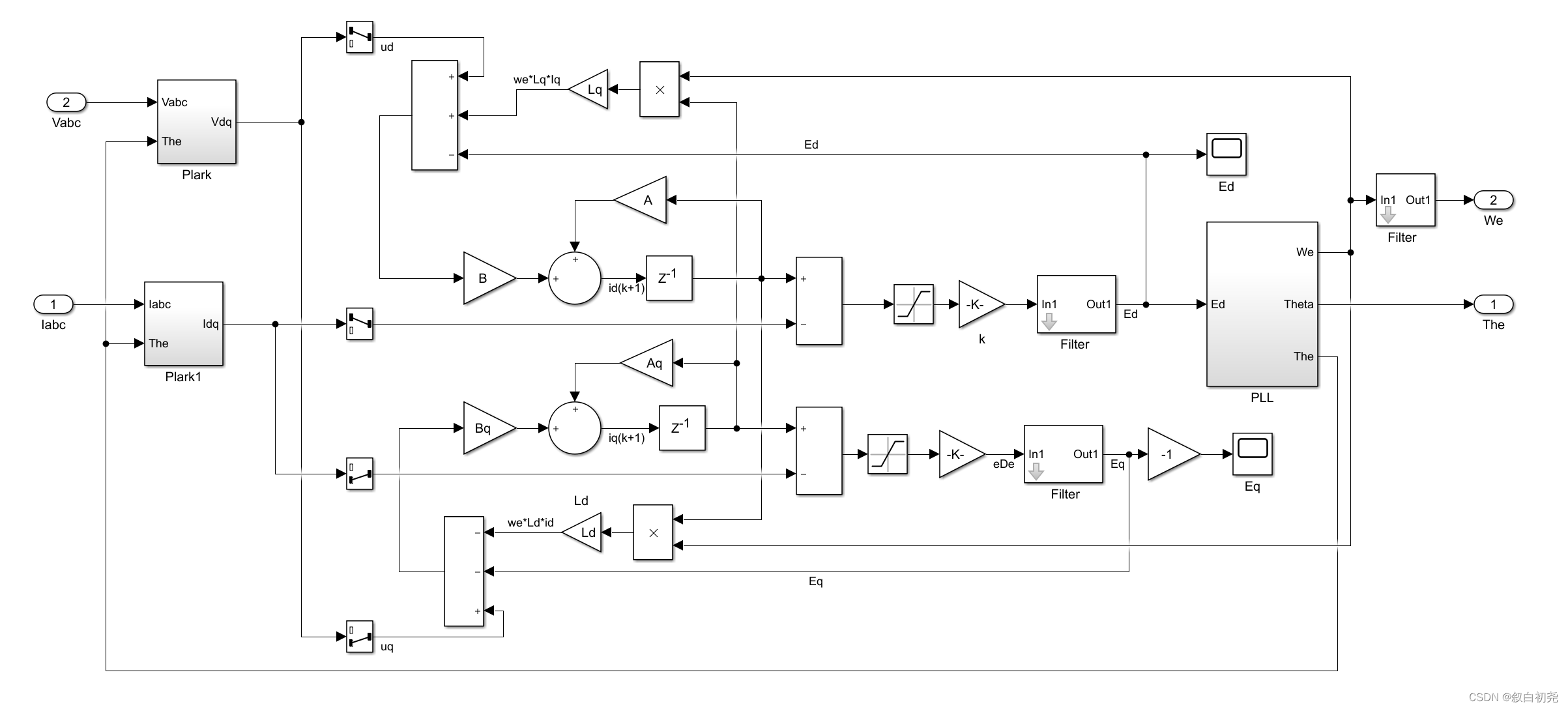
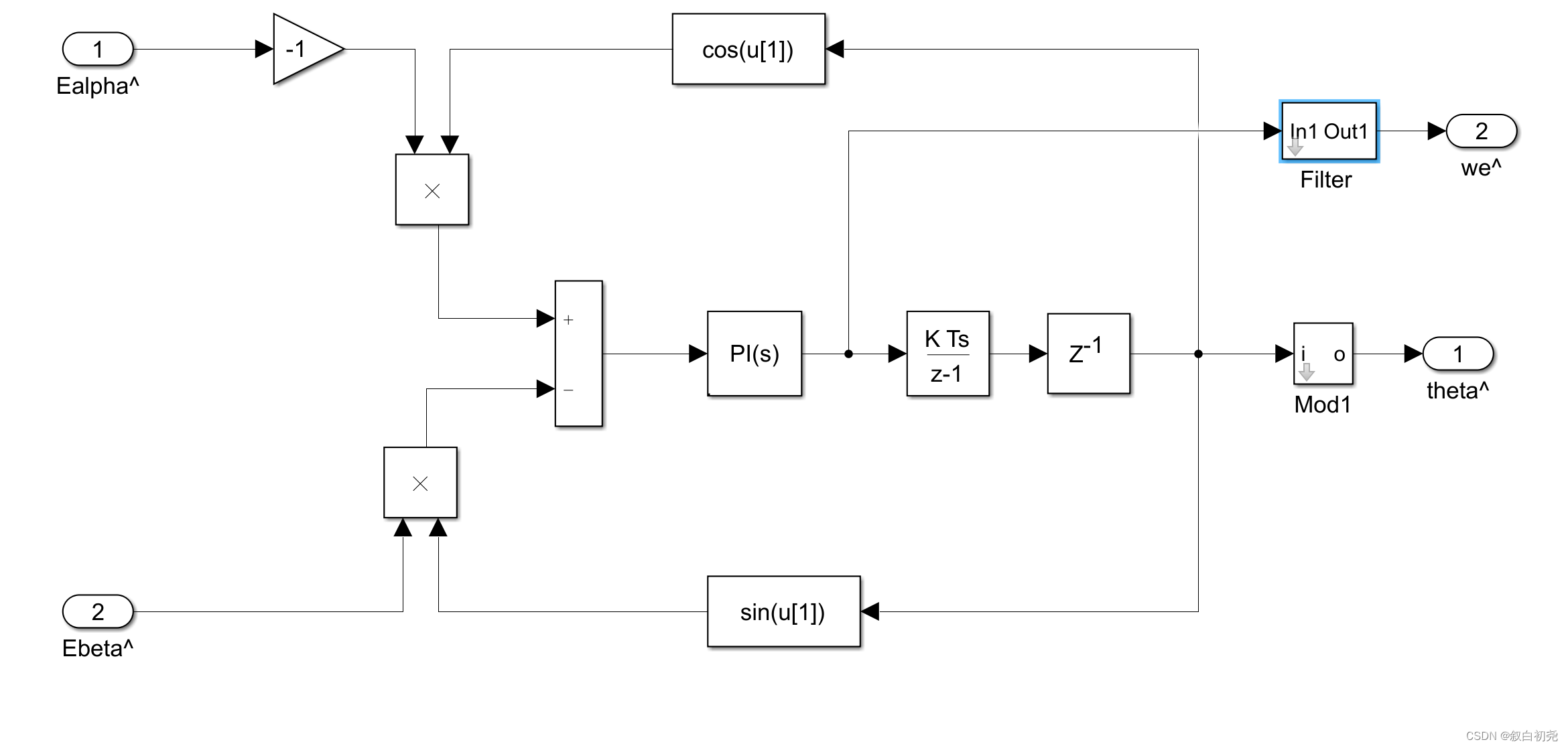
PLL
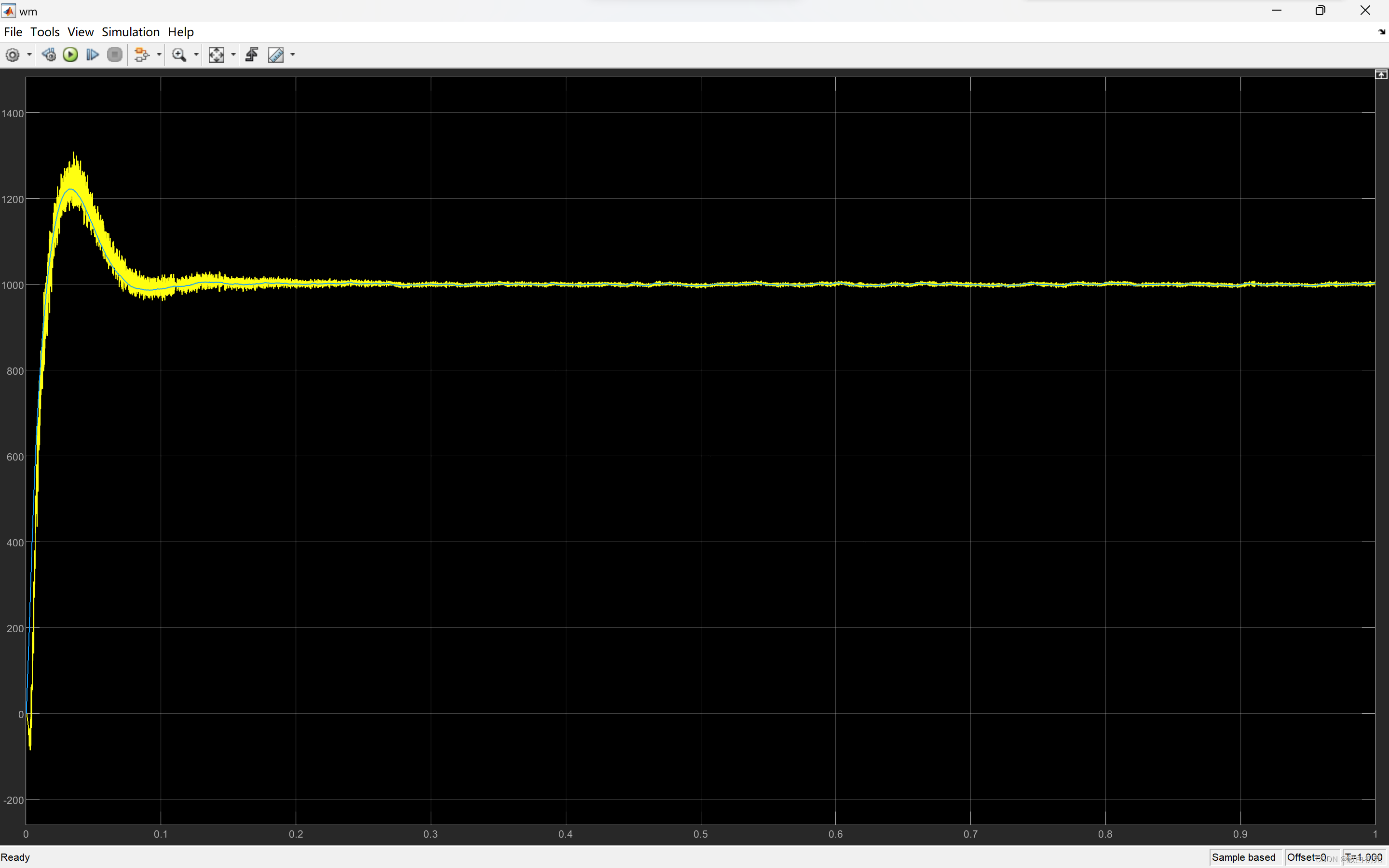
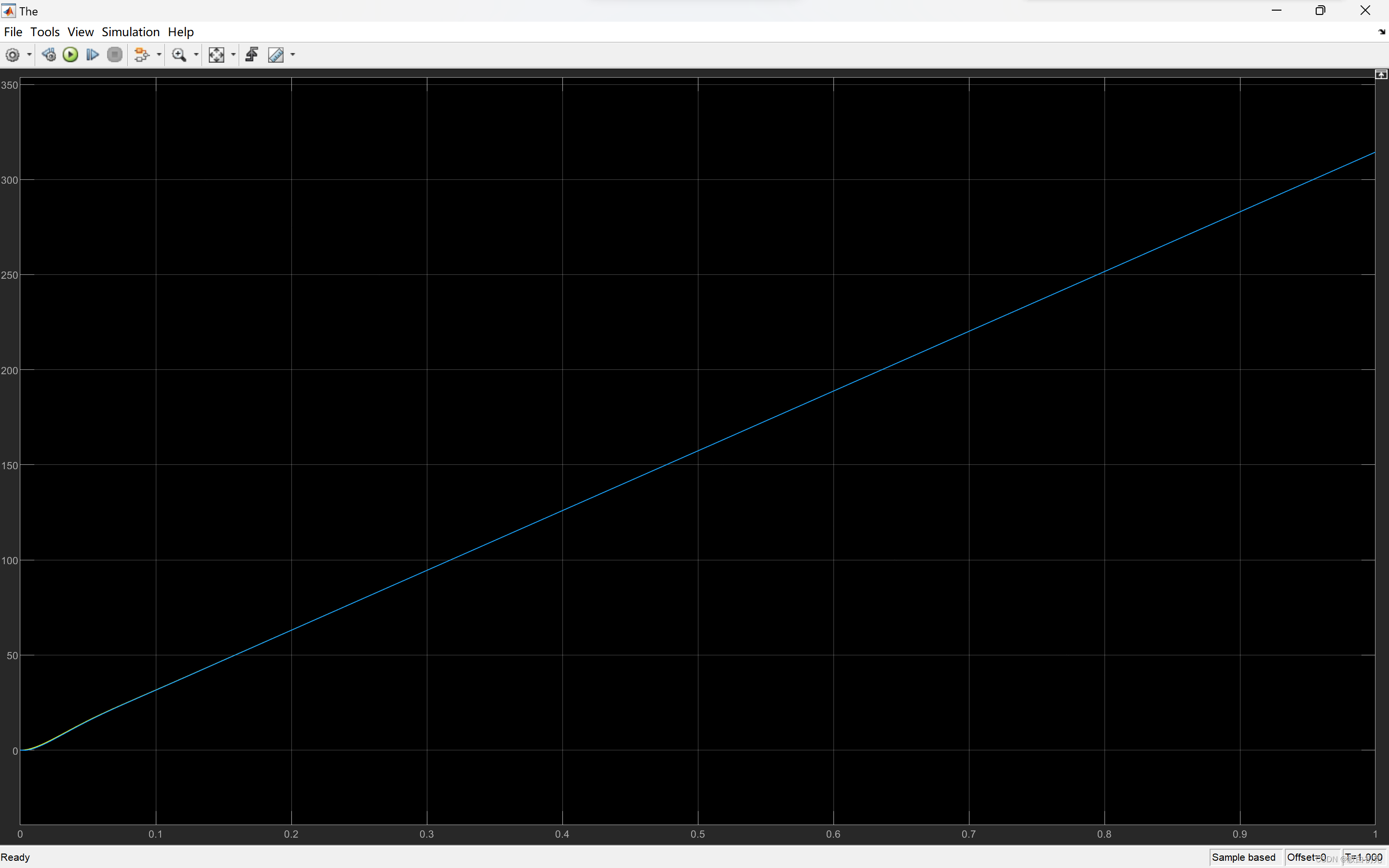
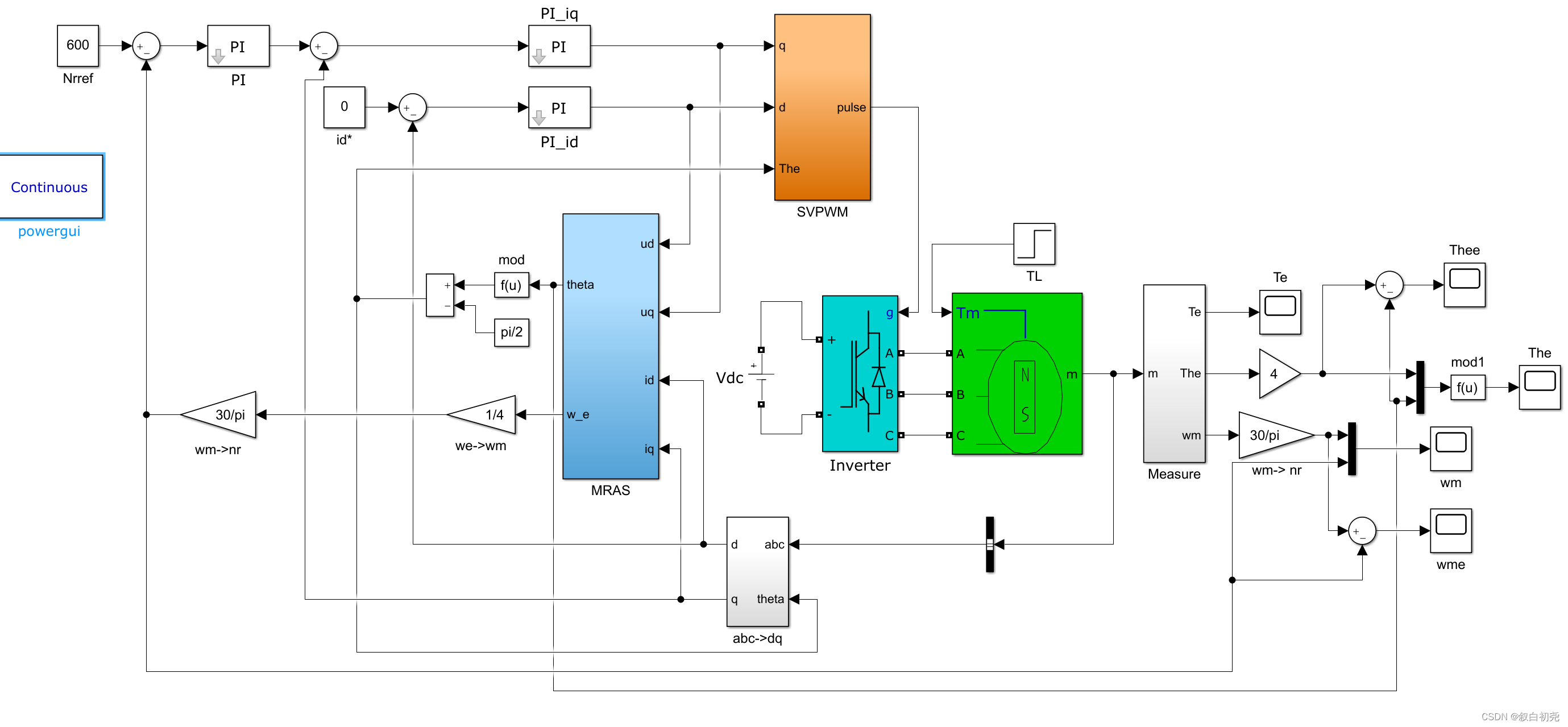
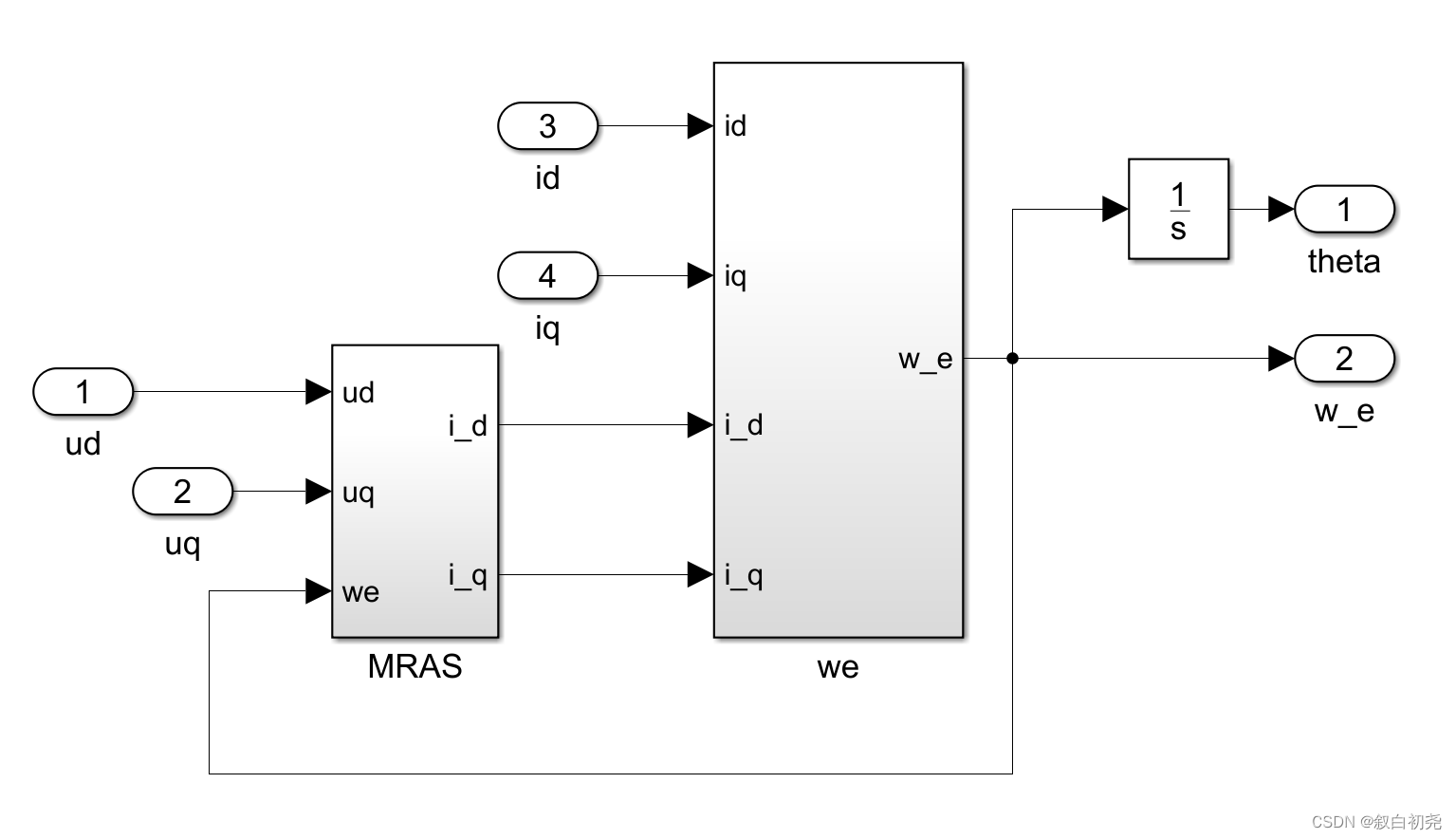
四、模型参考自适应系统
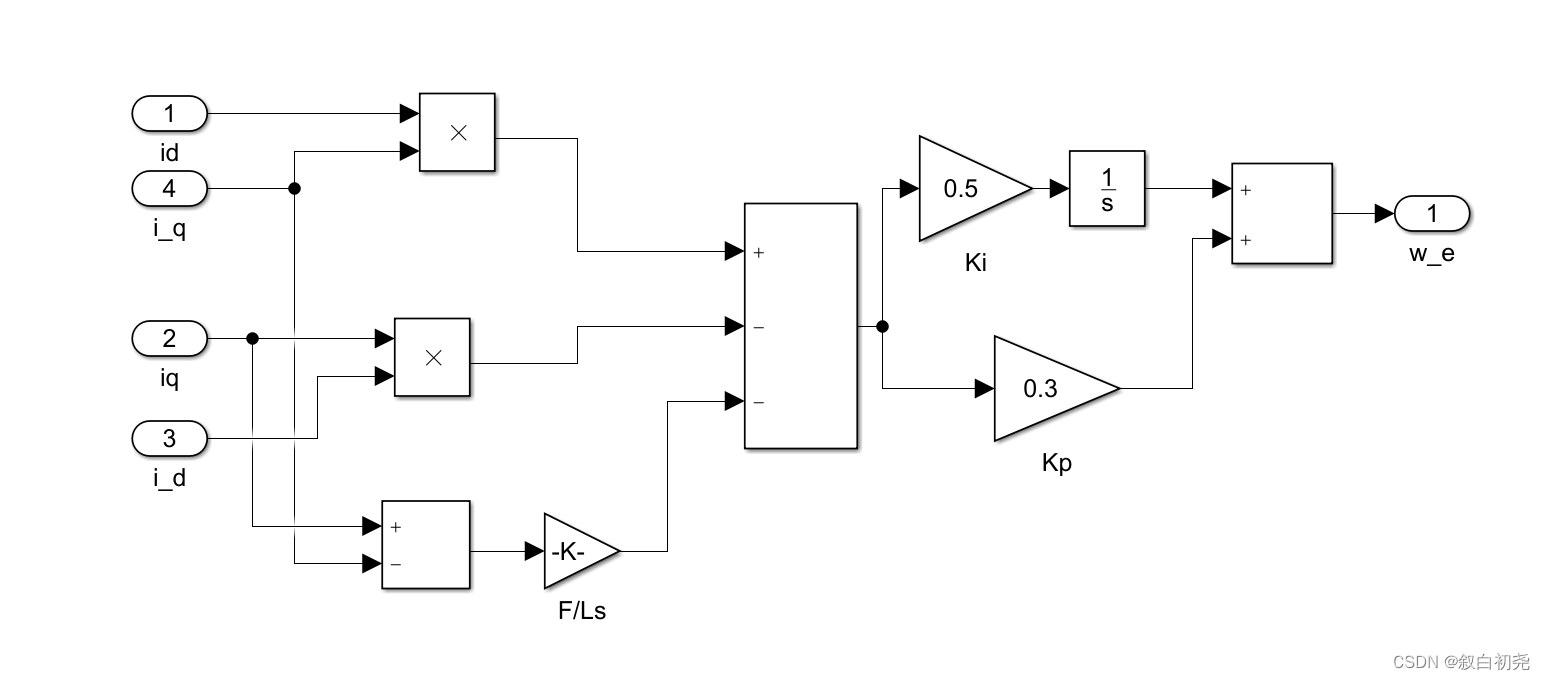

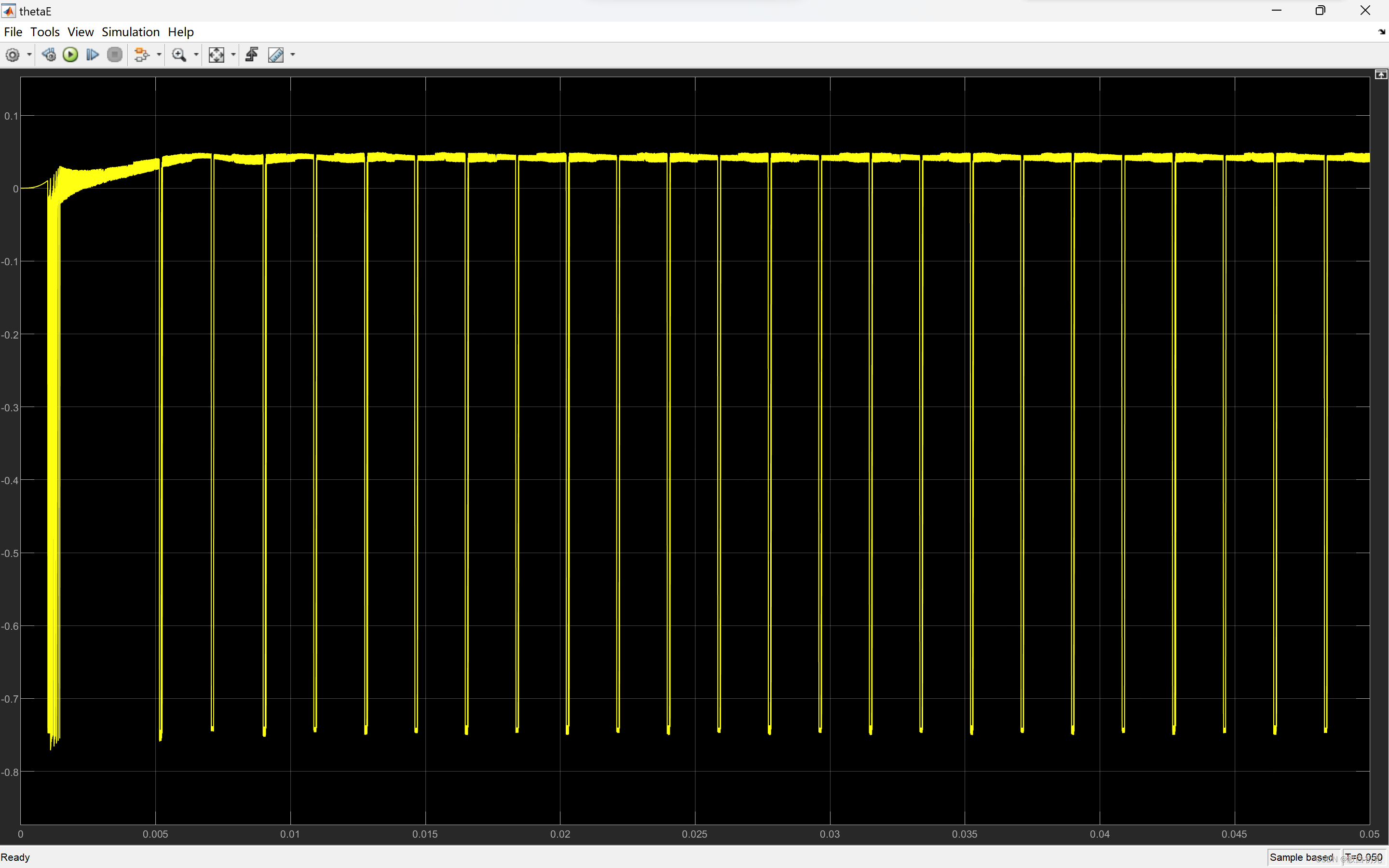
theta误差
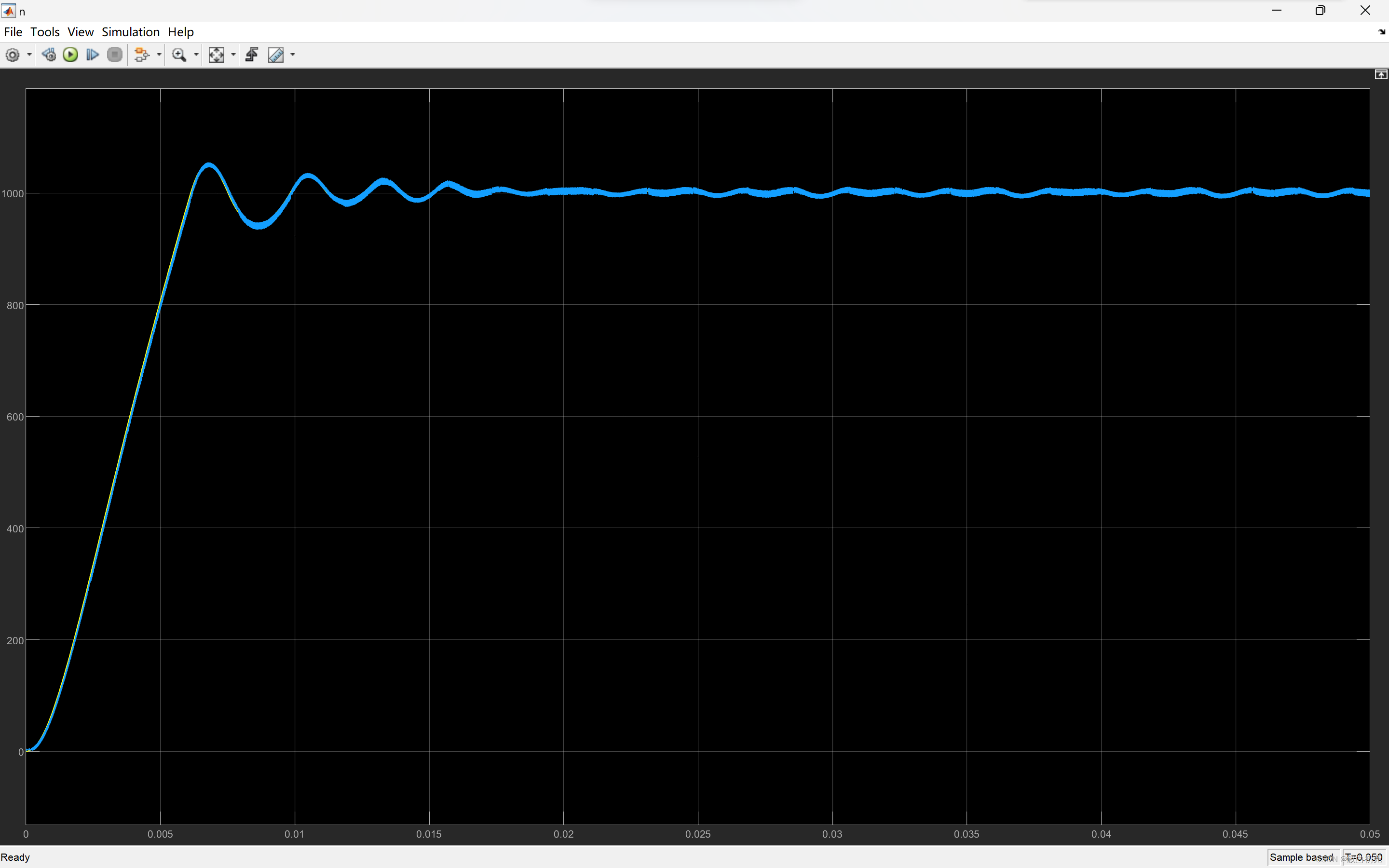
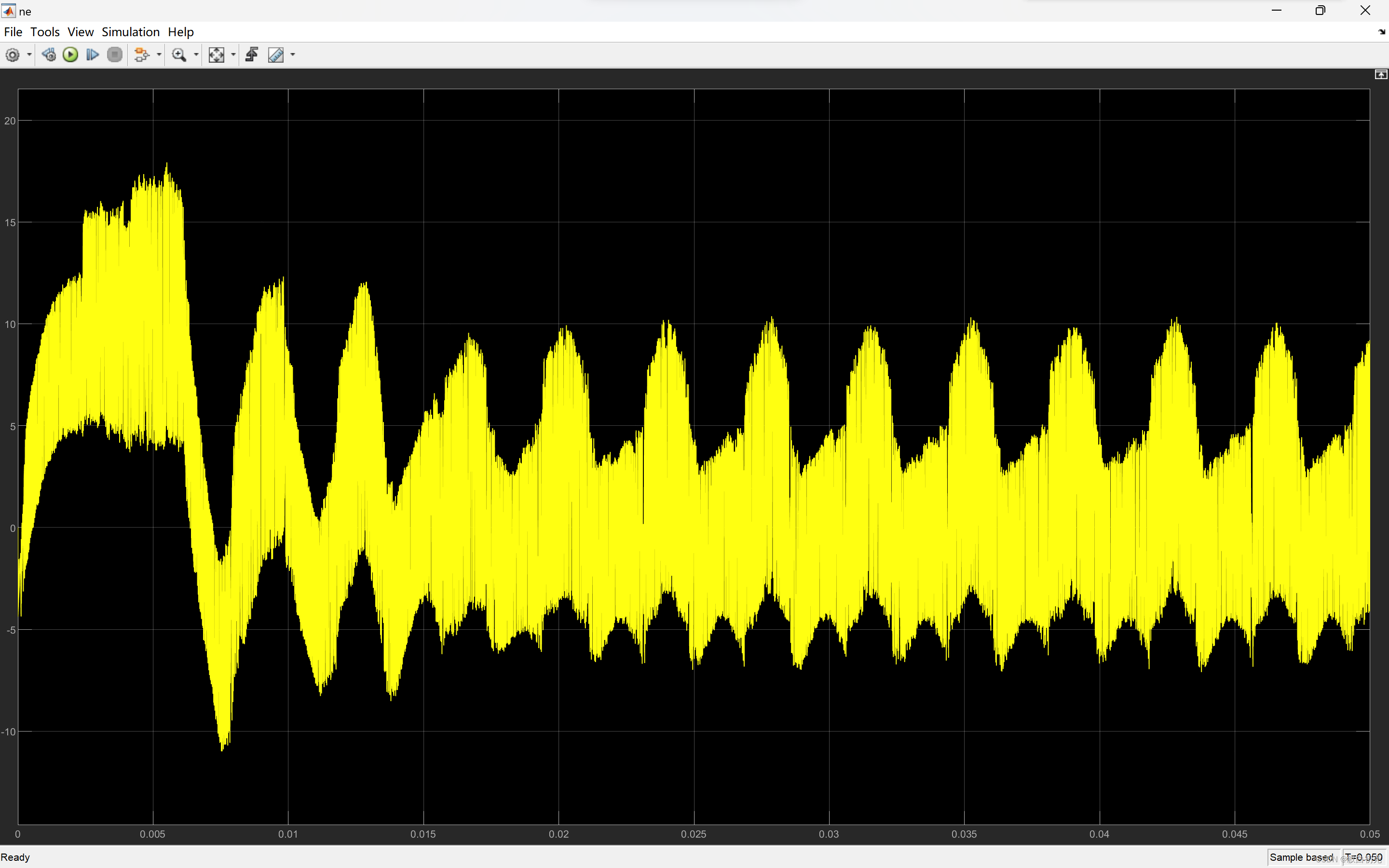
n误差















 4320
4320











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









