




网卡设置固定IP和机械臂通过网线连接。
请参考这篇文章中的步骤:ROS - 使用UR机械臂最新的 ur_robot_driver
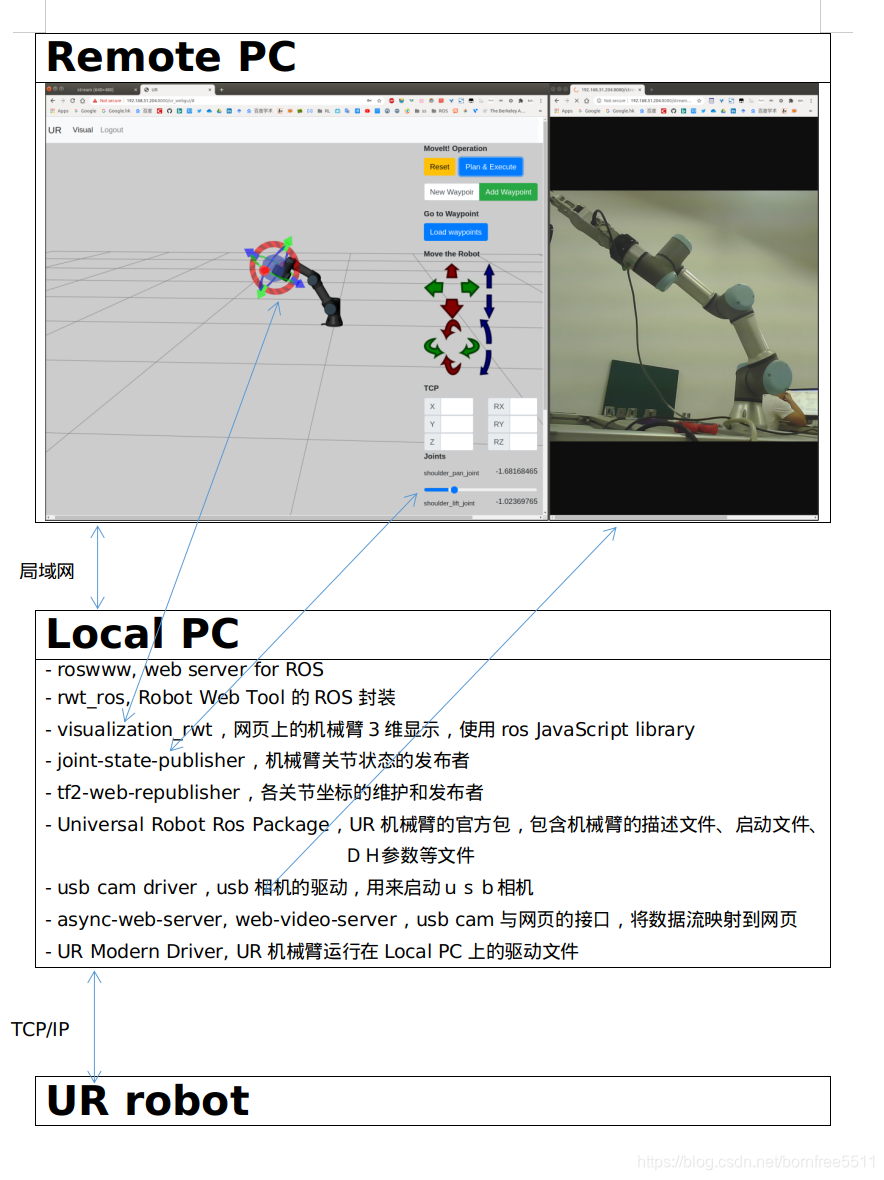
网页控制机械臂主要通过 robot web tools
robot web tools包含roslibjs, ros2djs, ros3djs, roslibpy, rosgraph web visualizer等工具,它们提供了本地ROS和网页交互的接口。
同时,PC通过ROS控制机械臂,还需要UR机械臂的驱动程序,目前最新的驱动是ur robot driver,考虑到生态,使用ur modern driver会有更多的资料和使用经验。对于CB3.10以上,还需要对ur modern driver进行一些修改。
为了监视机械臂,还配置了一个摄像头,摄像头通过ROS连到网页需要async-web-server
和web_video_server,如果使用USB摄像头,还需要USB摄像头的驱动文件(usb cam)。
所有的这些必须软件已经集成在了软件仓库中,直接git clone下来。
首先要建立ros workspace
mkdir -p catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
sudo apt install git
sudo apt-get install ros-${ROS_DISTRO}-async-web-server-cpp
git clone https://github.com/borninfreedom/ur-webgui.git
cd ..
catkin_make
使用
roslaunch ur_webgui ur3_real.launch robot_ip:=192.168.56.2
roslaunch usb_cam usb_cam-test.launch
rosrun web_video_server web_video_server
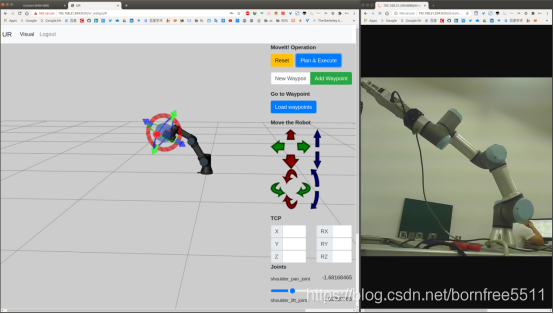
在另一台和控制机械臂的PC在同一局域网的电脑浏览器上输入
http://hostname_of_PC_control_ur:8000/ur_webgui,
其中hostname_of_PC_control_ur指的是和控制柜相连的PC,hostname可以直接通过 hostname 指令查看。
如果通过hostname不能连接成功,直接用IP替换hostname。
在浏览器新打开一个标签页,输入
http://hostname:8080/stream?topic=/usb_cam/image_raw
同样,hostname指控制PC的hostname,或者用IP代替。
输入后,账户和密码都是admin,即可看到开始界面。

















 5916
5916

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









