







HC-SR04超声波模块工作原理:
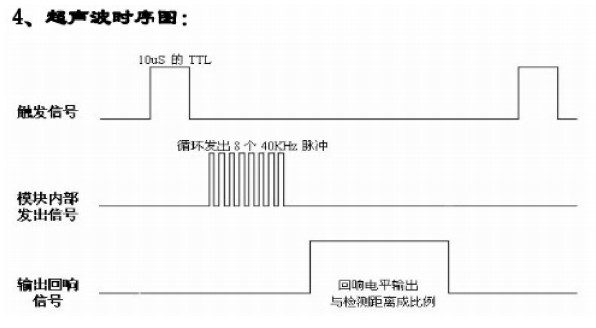
- 采用IO口TRIG触发测距,给至少10us的高电平信号;
- 模块自动发送8个40khz的方波,自动检测是否有信号返回;
- 有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2;
详细信息:

使用方法
初始化时将trig和echo端口都置低,首先向给 trig 发送至少10 us的高电平脉冲(模块自动向外发送8个40K的方波),然后等待,捕捉 echo 端输出上升沿,捕捉到上升沿的同时,打开定时器开始计时,再次等待捕捉echo的下降沿,当捕捉到下降沿,读出计时器的时间,这就是超声波在空气中运行的时间,按照 测试距离=(高电平时间*声速(340M/S))/2 就可以算出超声波到障碍物的距离。
树莓派的接线
VCC,超声波模块电源脚,接5V电源即可
Trig,超声波发送脚,高电平时发送出40KHZ出超声波
Echo,超声波接收检测脚,当接收到返回的超声波时,输出高电平
GND,超声波模块GND
参考代码:
#! /usr/bin/python
# -*- coding:utf-8 -*-
import RPi.GPIO as GPIO
import time
def checkdist():
#发出触发信号
GPIO.output(2,GPIO.HIGH)
#保持10us以上(我选择15us)
time.sleep(0.000015)
GPIO.output(2,GPIO.LOW)
while not GPIO.input(3):
pass
#发现高电平时开时计时
t1 = time.time()
while GPIO.input(3):
pass
#高电平结束停止计时
t2 = time.time()
#返回距离,单位为米
return (t2-t1)*340/2
GPIO.setmode(GPIO.BCM)
#第3号针,GPIO2
GPIO.setup(2,GPIO.OUT,initial=GPIO.LOW)
#第5号针,GPIO3
GPIO.setup(3,GPIO.IN)
time.sleep(2)
try:
while True:
print 'Distance: %0.2f m' %checkdist()
time.sleep(0.5)
except KeyboardInterrupt:
GPIO.cleanup()参考资料:
http://blog.chinaunix.net/uid-21658993-id-4694734.html















 1208
1208

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









