







 本文深入解析PointCloudSensor的工作原理,包括其采样策略、配置参数、输出模式及在Simulink中的应用。介绍了AngularSampleMap、SampleAccuracy等关键概念,探讨了采样方向、精度控制和输出数据表示。
本文深入解析PointCloudSensor的工作原理,包括其采样策略、配置参数、输出模式及在Simulink中的应用。介绍了AngularSampleMap、SampleAccuracy等关键概念,探讨了采样方向、精度控制和输出数据表示。
Point Cloud Sensor是真值传感器,能够输出原始的点云数据
转载请注明出处:https://blog.csdn.net/gloria_iris/article/details/105720798
目录
(7). Output data representation
(8). User Interface(UI) vs. data model API
1. 介绍
PCS(Point Cloud Sensor)是以高数据速率和高更新速率构造点云数据的理想传感器,具有固定但可配置的模式,并针对性能(速度)进行了优化。PCS是gound truth(真值)传感器,从传感器视角对世界采样,采样方向称为角度采样图,对每个采样方向返回点云数据,根据传感器配置对每个采样点提取信息。
(1). Angular Sample Map
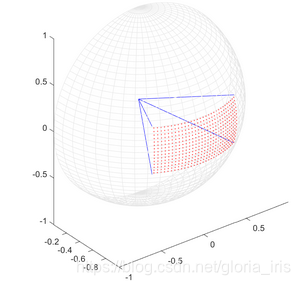
指定了所需样本方向的集合,实际采样方向可能有些差异。the angular sample map由4个参数构成,这些参数描述了单位球面上的规则网格,因而方向可球形坐标中描述:
| 参数 | 描述 | 默认值 | Min. | Max. |
|---|---|---|---|---|
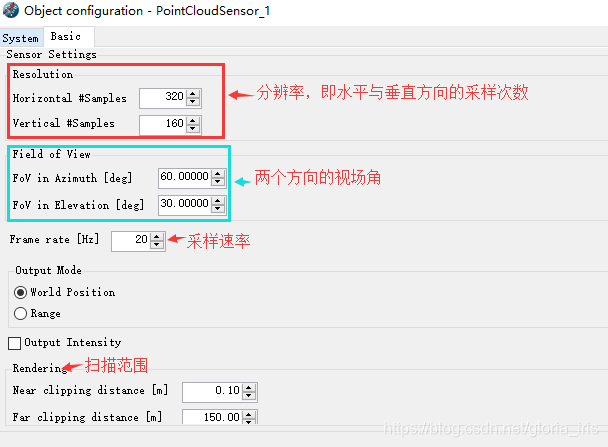
| FoV in Azimuth(deg) | 传感器的水平视场角 | 60 | 0.1 | 120 |
| FoV in Elevation(deg) | 每个azimuth方向,相同的垂直视场 | 30 | 0.1 | 60 |
| #水平采样 | azimuth方向上等角距离样本的数量 | 320 | 1 | 3840 |
| #垂直采样 | elevation方向上等角距离样本的数量 | 160 | 1 | 2160 |
传感器位于半球中心,蓝线表示视场角的线。仔细看会发现蓝线没有完全结束于采样点的corner,这是为了无缝并排排放多个PCSs,以构建更宽的视场或将视场从一个时间步长移动到另一个时间步长。例子中60度azimuth进行30次采样,采样间隔=2deg。azimuth角度是[-29,-27,...,-1,1,...,27,29]。
(2). Sample Accuracy
PCS有基本的采样策略,规定了一组可能的采样方向。传感器报告有关采样点的信息,意味着采样点与the angular sample map中指定的点可能不重合。方位角和仰角的最大误差由标中的两个参数控制:
| 参数 | 描述 | 默认值 |
|---|---|---|
| azimuth sample accuracy(deg) | azimuth方向的角度误差<=azimuth采样精度的一半 | 0.05 |
| elevation sample accuracy(deg) | elevation方向的角度误差<=elevation采样精度的一半 | 0.05 |
当前只能通过模型API访问这些值,因为PreScan对这些值不施加任何限制,必须小心配置参数。较小的值会提高角度精度,但也会使传感器变慢,甚至发生意外情况。
(3). Angular error correction
PCS有有效算法来估计传感器在准确方向上的采样,该算法默认开启,可通过API关闭。
| extrapolation | angular accuracy | range accuracy | points are real intersections |
|---|---|---|---|
| false | azimuth/elevation采样精度的一半 | 约为0m | always |
| true | 约为0度 | 无界,但优于均值 | mostly |
(4). Frame rate
帧率=水平采样*垂直采样的集合
(5). Output mode
有两种输出模式:
- World Position(default):返回每个点在Prescan世界坐标系中的(x,y,z)坐标位置;
- Range mode:返回每个点的距离。
选项:可在采样点返回目标的反射率,该反射率是red channel的漫反射。在用户界面intensity复选框,值的范围[0.0,1.0];
(6). Detection range
通过near clipping distance和far clipping distance参数来配置检测到的最小和最大距离。
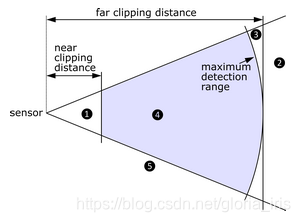
图2中对象1的深度<near clipping,因此不被检测,移除后不会遮挡任何其他目标;目标2的深度>far clipping,故不被检测;PCS的最大检测距离=far clipping distance,即目标3不被检测;目标4在检测范围内,可被检测;目标5在FOV外,不被检测。
| 参数 | 描述 | 默认值 | min. | max. |
|---|---|---|---|---|
| Near clipping distance(m) | 深度小于ncd的区域将被移除 | 0.1 | 0.01 | fcd-0.01 |
| Far clipping distance(m) | 深度大于fcd的区域将被移除 | 150 | 0.02 | 1000 |
(7). Output data representation
PCS返回的值是单精度(32位)浮点型,当图2的蓝色区域无检测时,输出的Range=inf,X,Y,Z=NaN(取决于输出模式)。
(8). User Interface(UI) vs. data model API
| 参数 | In UI | In model API | 参数 | In UI | In model API |
|---|---|---|---|---|---|
| FoV in Azimuth(deg) | Yes | Yes | FoV in Elevation(deg) | Yes | Yes |
| #horizontal samples | Yes | Yes | #vertical samples | Yes | Yes |
| horizontal sample accuracy | No | Yes | vertical sample accuracy | No | Yes |
| extrapolation | No | Yes | |||
| Output mode | Yes | Yes | Output intensity | Yes | Yes |
| near clipping distance | Yes | Yes | far clipping distance | Yes | Yes |
2. PCS的配置
- System tab:位置和方向;
- Basic Tab:配置如图3.
3. PCS在Simulink中的输出

输出端口x,y,z,Rnage, Intensity是矩阵形式,矩阵维数对应PCS的水平和垂直采样。可在Compilation Sheet的’Open Useful Blocks‘中找到点云可视化模块。
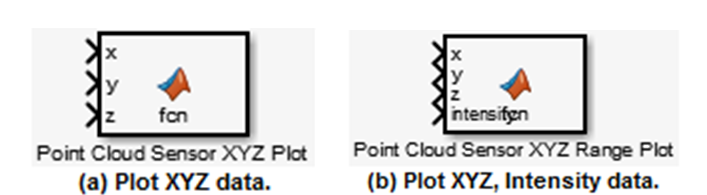
图5 点云数据可视化的两个模块

















 1050
1050

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









