







EKF
EKF称为扩展卡尔曼滤波,他和标准卡尔曼滤波有何区别呢?他的出现主要是为了解决在非线性系统下的最优估计问题,前面我们提到标准卡尔曼滤波只适用于线性系统,对于非线性系统我们可以用EKF来进行最优估计。
GitHub demo
线性与非线性
https://zhuanlan.zhihu.com/p/84365683
线性(Linear)系统的一阶导数为常数,线性系统满足比例性和叠加性。
可以用简单的一句话来描述线性系统:若该系统的的微分方程满足线性性,则该系统为
线性系统,但是对于线性系统来说,一定要先区分系统的输入与输出,再来分析线性系统。
例如函数:f(t)=sin(t)r(t),此时 r(t) 才是输入,t 不是直接的输入变量,所以即使 sin(t) 不
是线性的,但该系统仍是线性的。
雅克比矩阵(Jacobian Matrix)
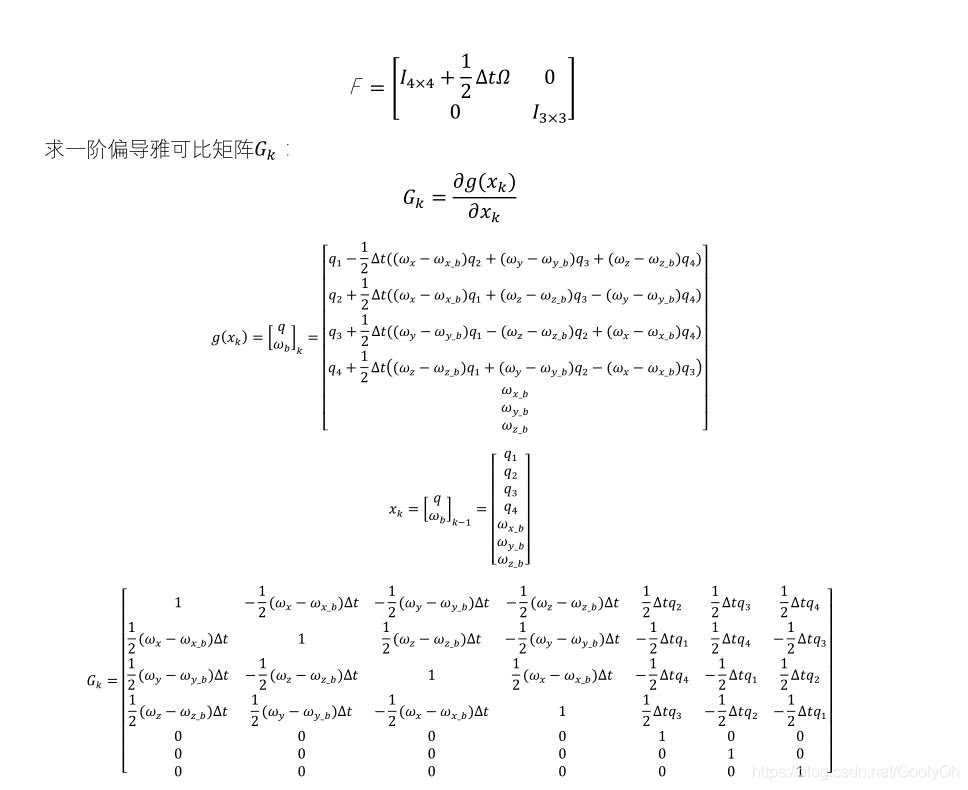
非线性系统线性化我们需要用到雅克比矩阵,实际上也就是求一阶偏导数,对于非线性进行线性化有很多种方法,比如:泰勒展开,最小二乘法,雅可比矩阵,傅里叶展开。对雅克比矩阵感兴趣的可以到雅可比矩阵是什么东西-3Blue1Brown了解更多,在工程上我们一般直接借助MATLAB或者PYTHON直接计算jabobian matrix即可。
高级IMU
前一章我们使用标准卡尔曼滤波实现了姿态估计,但是在实际应用中,我们看到飞控中用的是EKF来进行姿态估计,这是为什么?回顾一下我们之前的系统状态量,是3轴欧拉角,对吧?在实际应用中,由于万向锁的存在,我们不会使用欧拉角来表示姿态,在全姿态的模型中,我们使用四元数来表示姿态,关于欧拉角,四元数,旋转矩阵这些我在系列文章的第一章就进行了全部描述,感兴趣的朋友可以回去看一看。
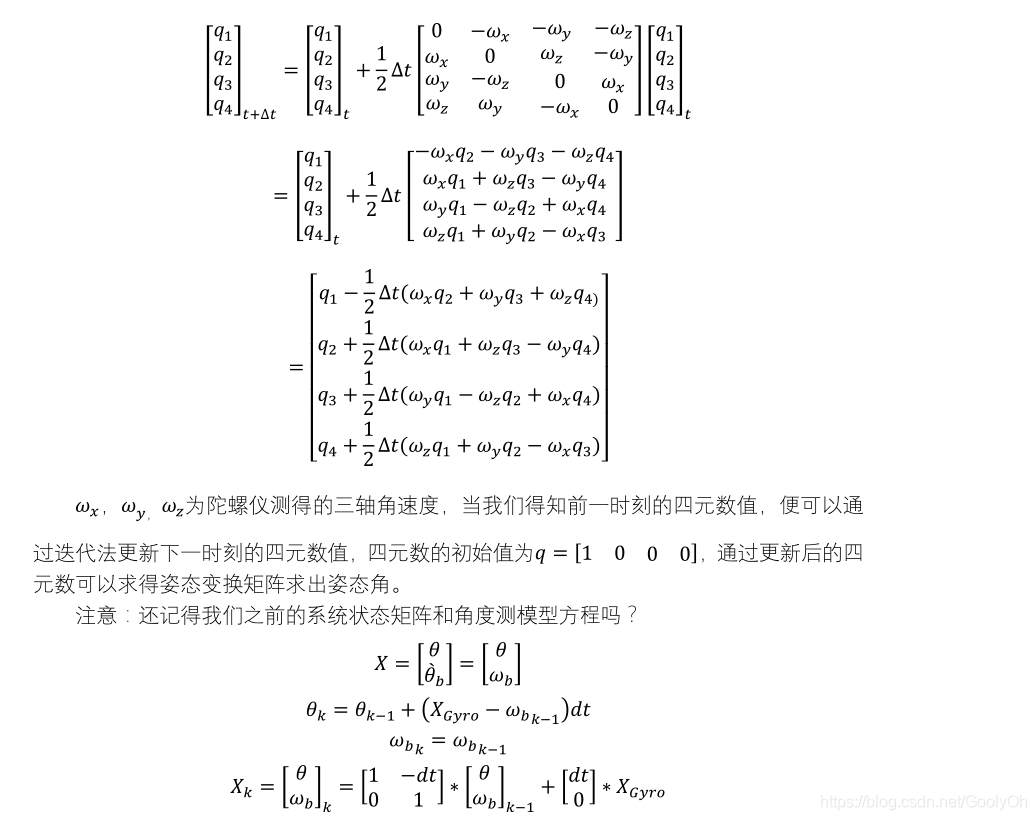
四元数微分方程
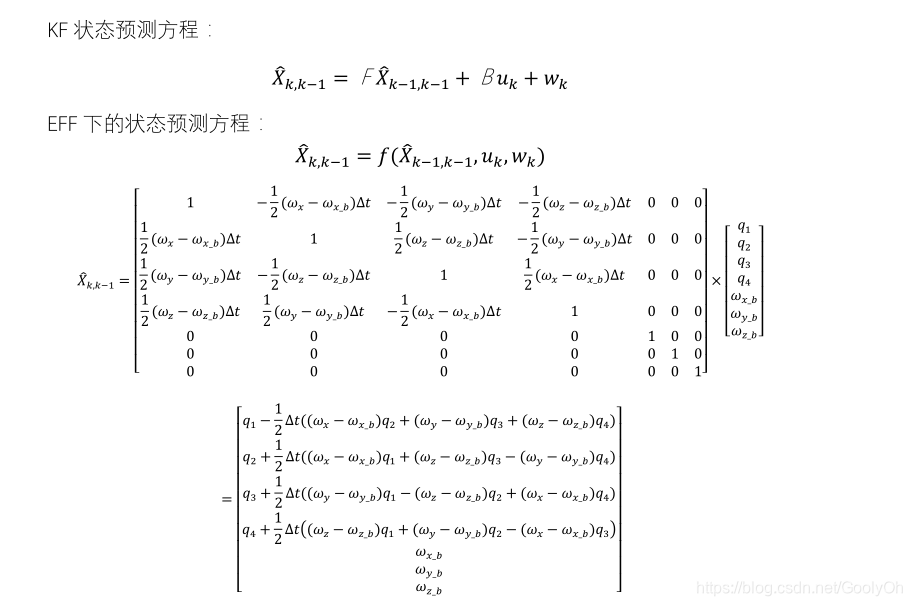
现在我们的系统状态量变成了四元数,也就是我们的系统模型发生了改变,第一步,我们要得到我们的系统模型动力方程,也就是状态预测方程。
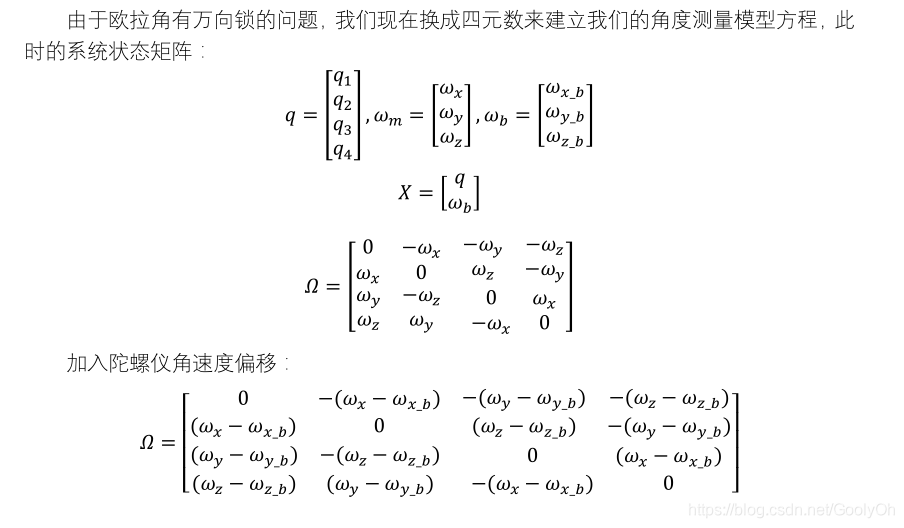


状态预测
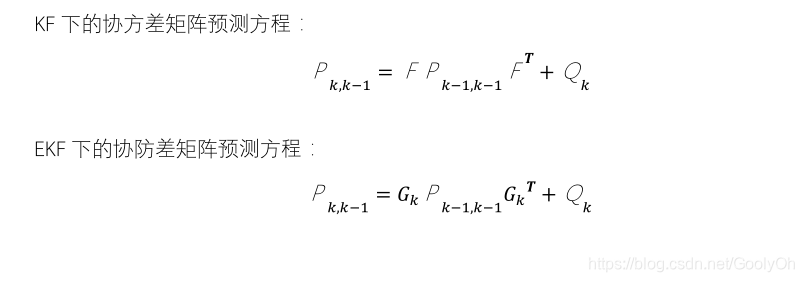
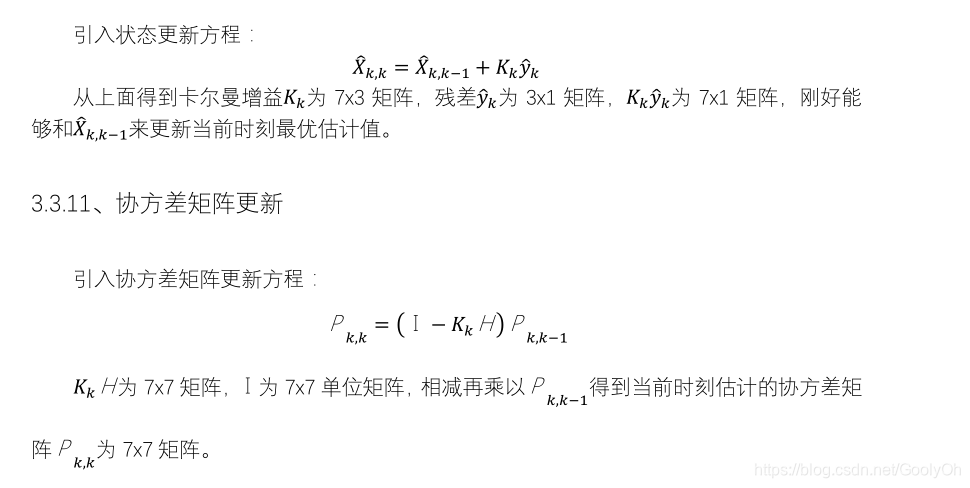
协方差矩阵预测
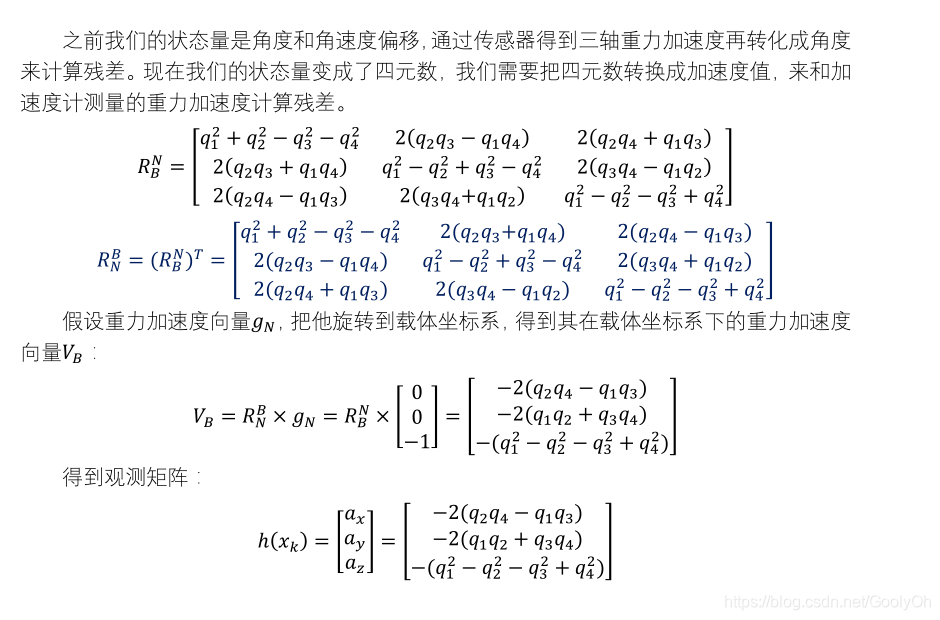
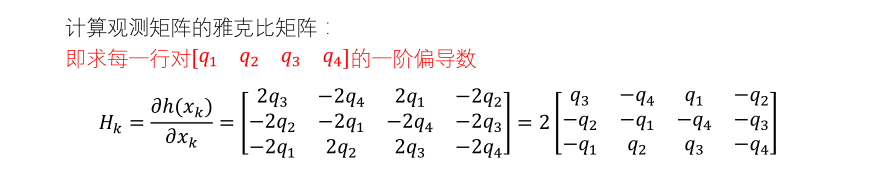
得到观测矩阵
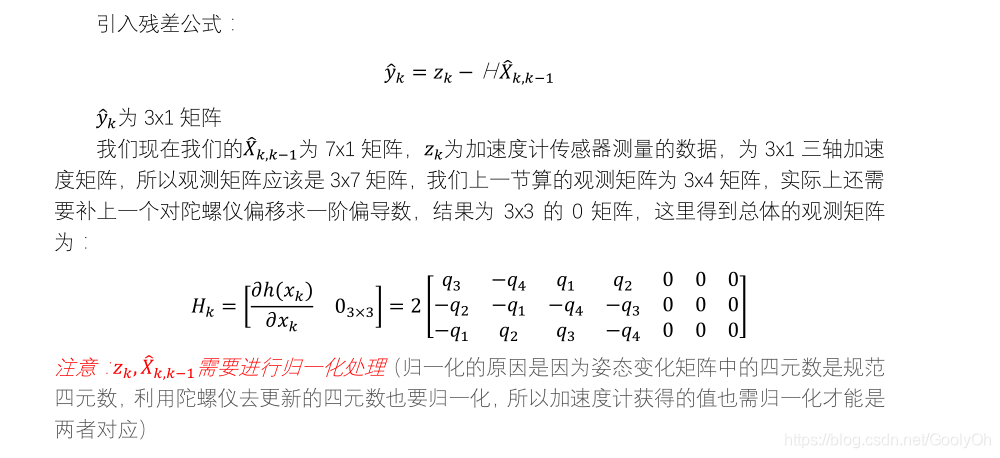
计算残差
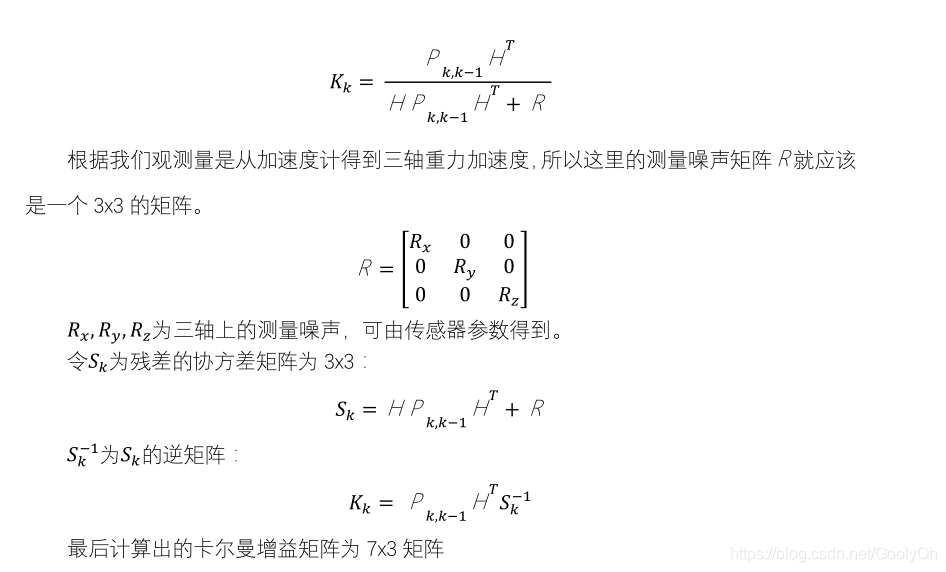
计算卡尔曼增益
状态更新
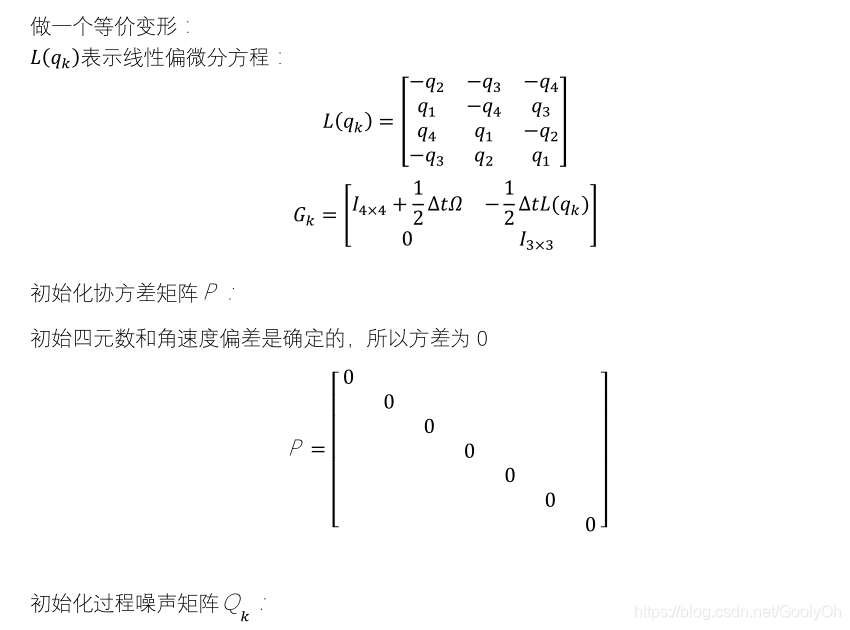
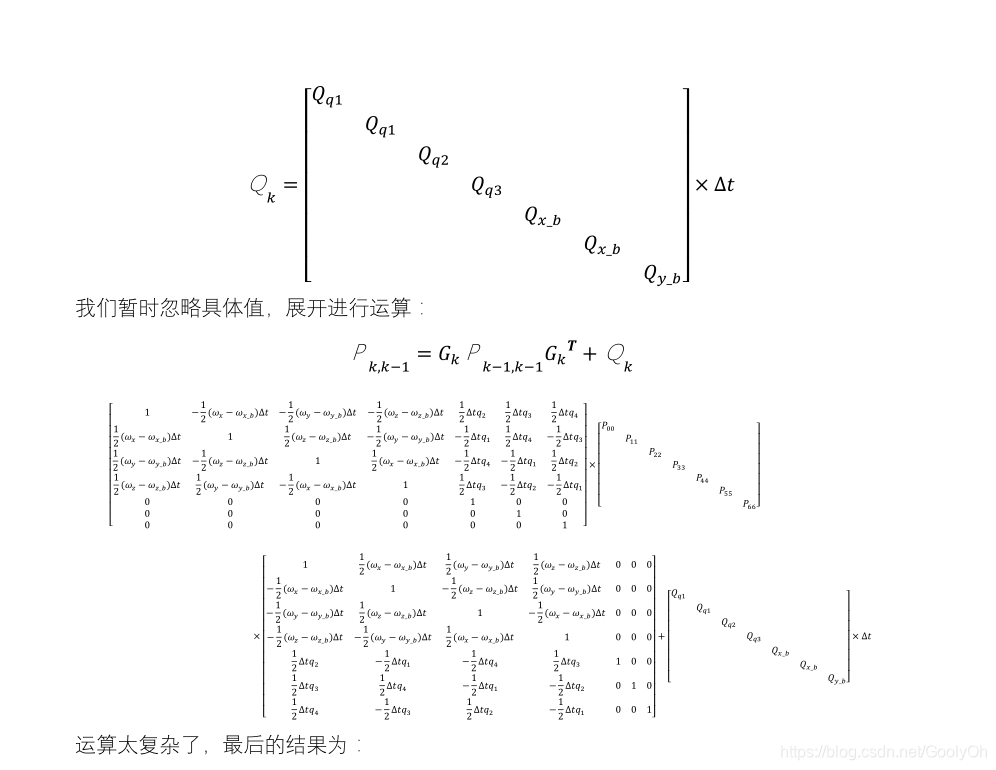
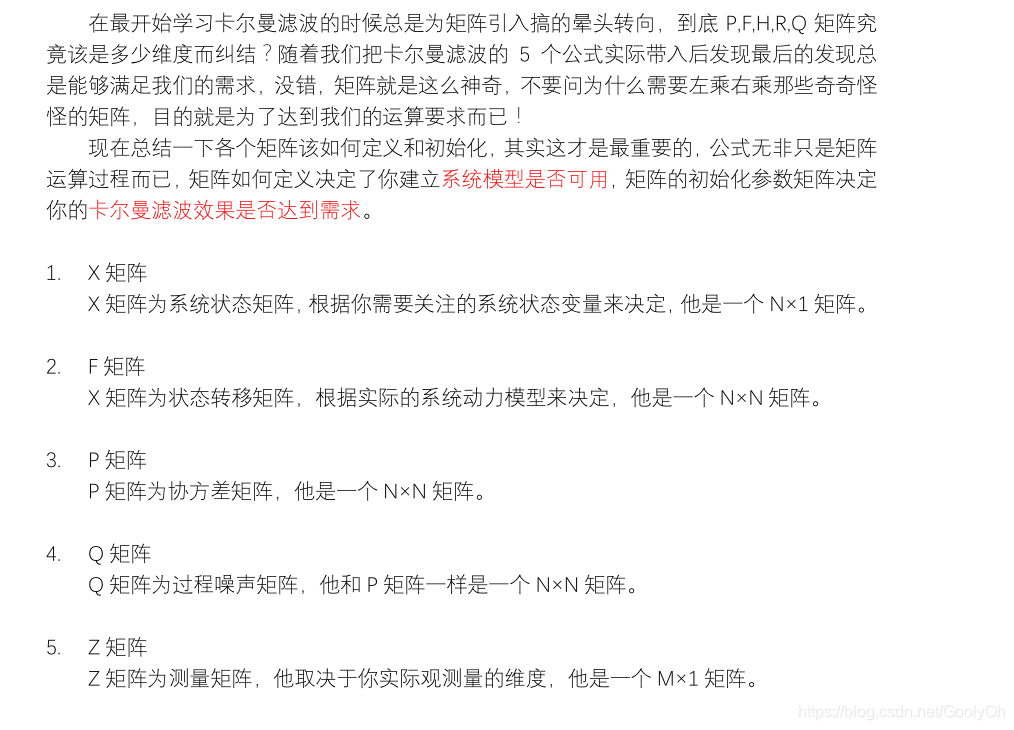
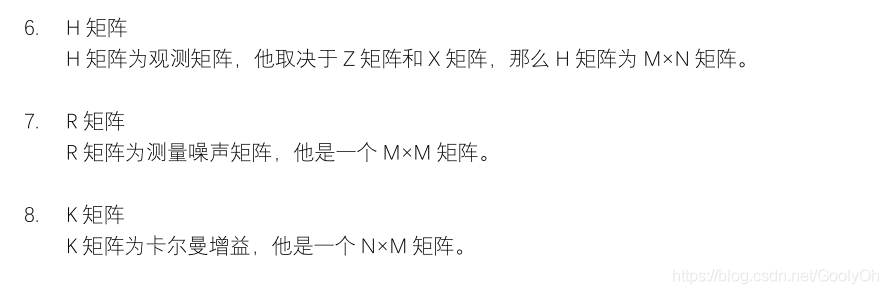
矩阵的定义和初始化
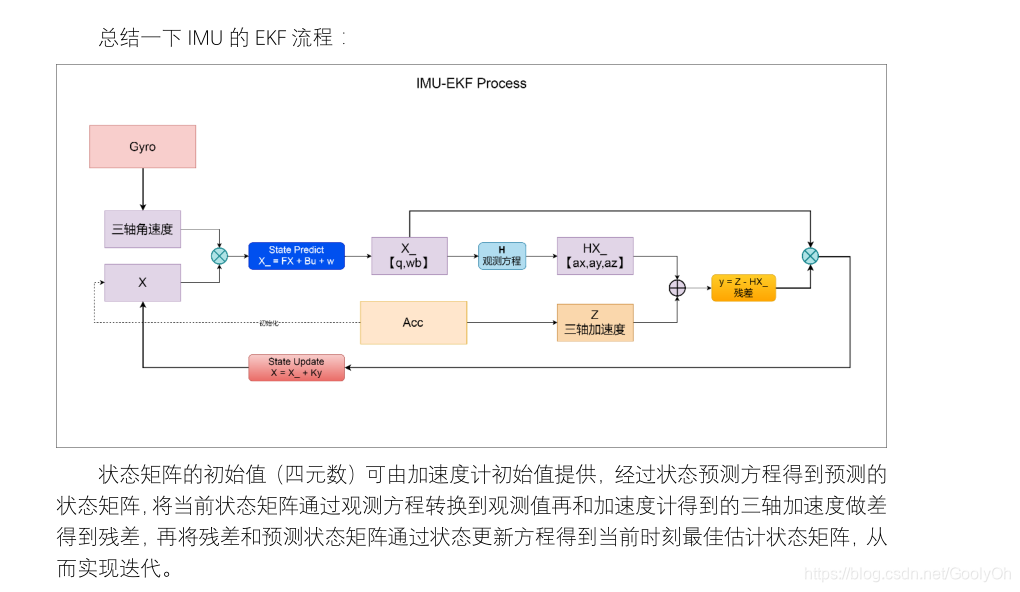
总结














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









