







实战 IMU 卡尔曼滤波
基础知识已经准备的差不多了,本章开始通过一个实际应用来真正感受一下卡尔曼滤波的魅力!
IMU 滤波
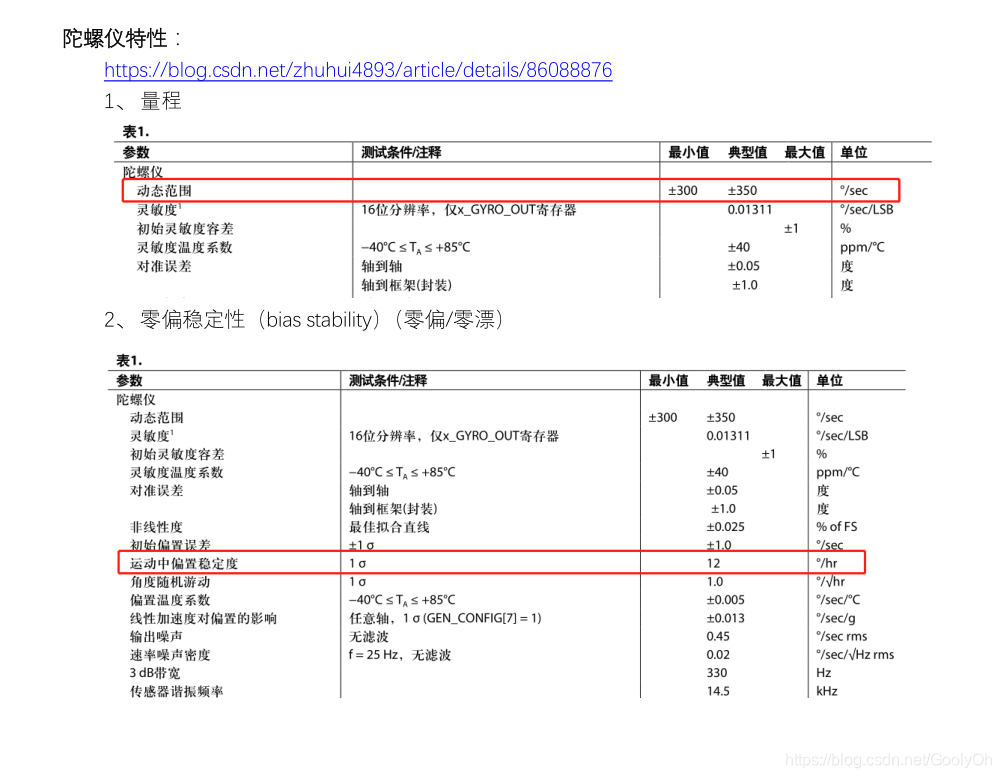
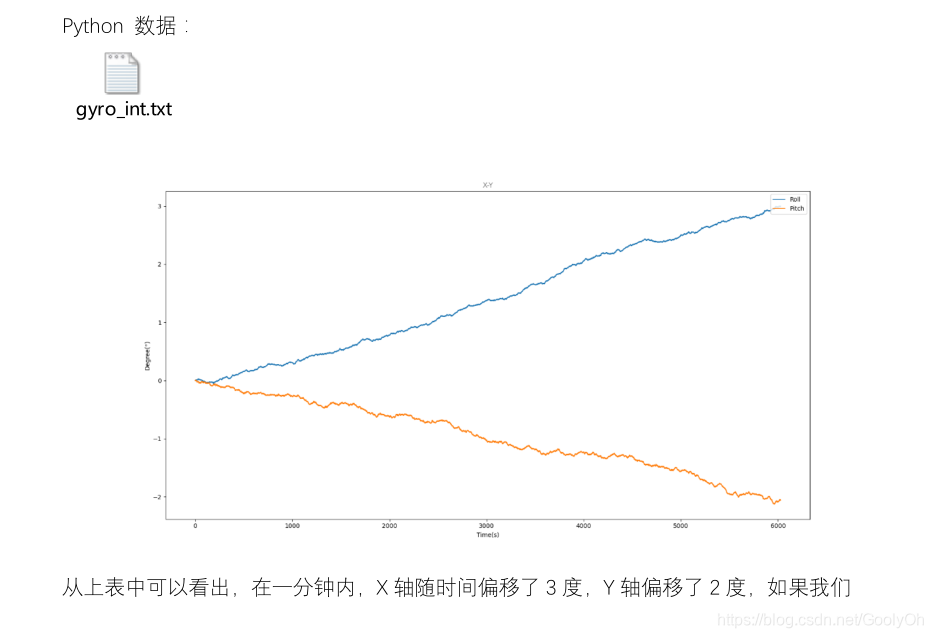
陀螺仪

加速度计
加速度计传感器得到的是 3 轴的重力分量,是基于重力的传感器,但是无法感知 Z 轴
上的旋转,我们可以通过三角函数来计算,X,Y 轴的旋转角度。
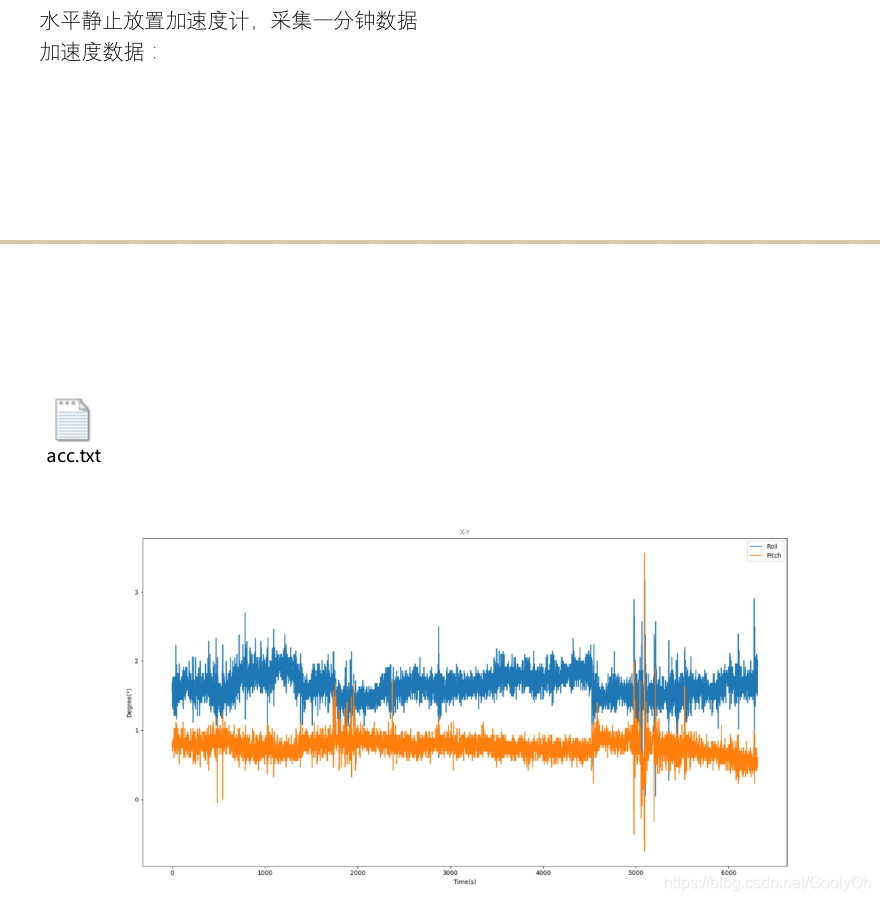
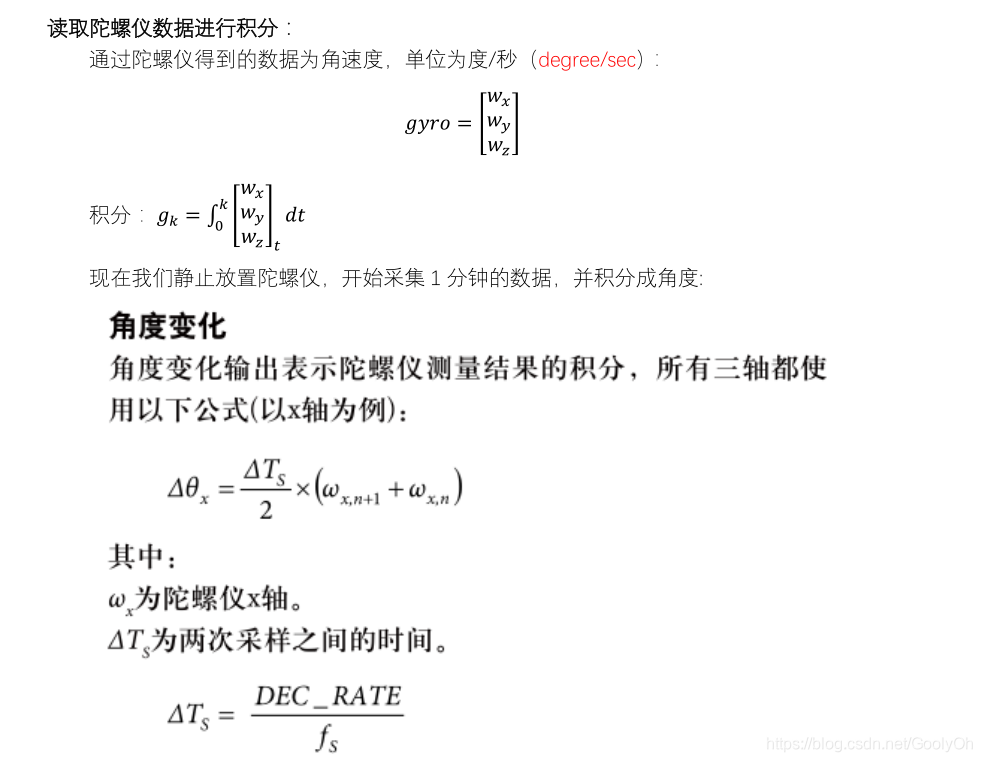
从图表中可以看出,在一分钟内,角度没有随着时间有漂移现象,但是伴随着的噪声很
大,必须经过滤波处理才能使用。
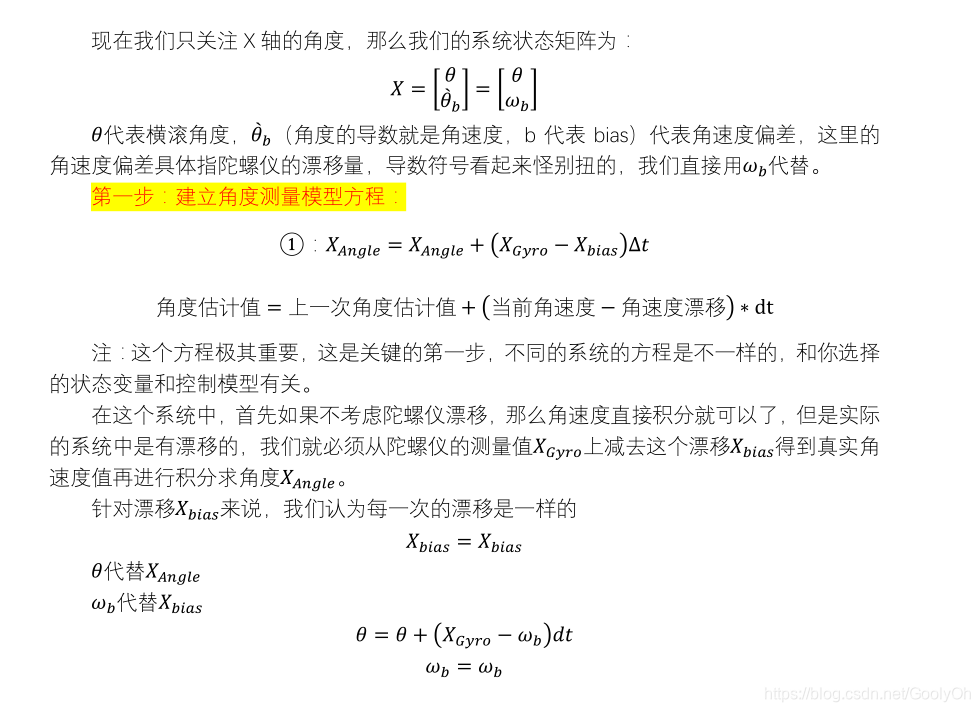
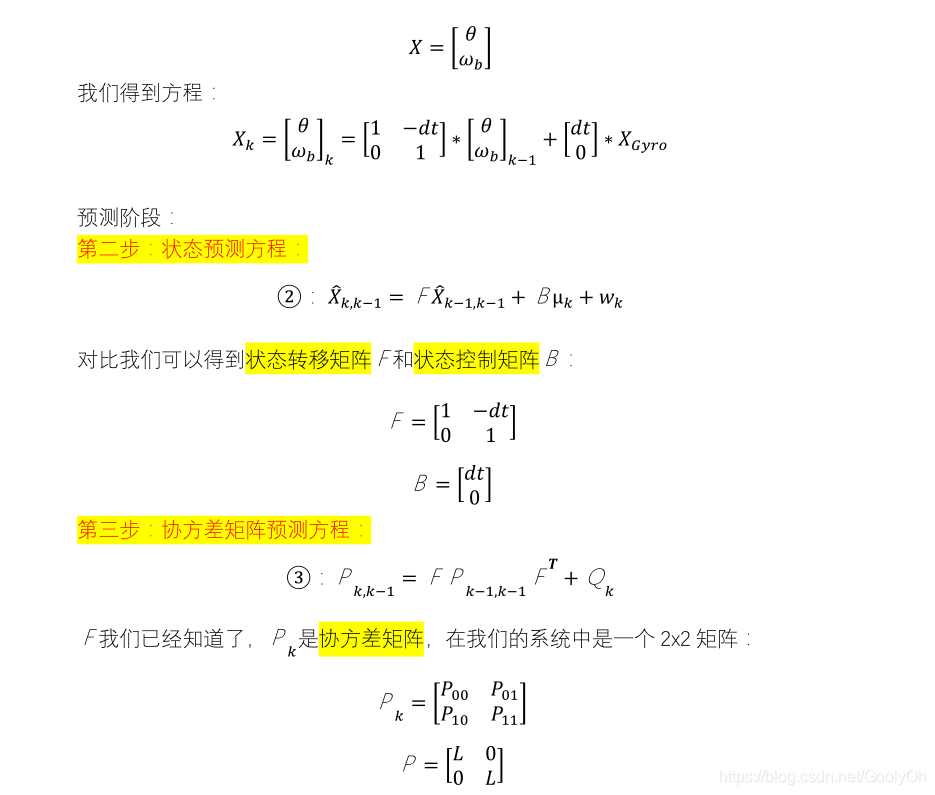
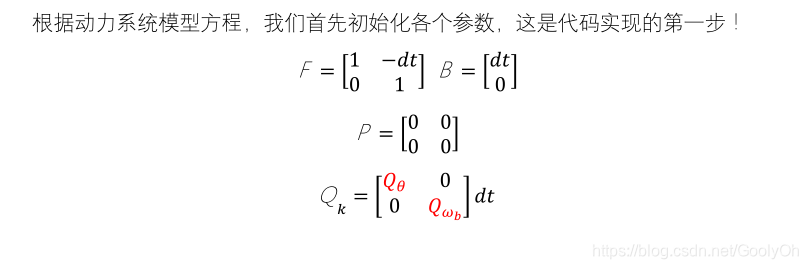
建立系统模型
代码实现卡尔曼滤波
关键元素:
1、 F 矩阵
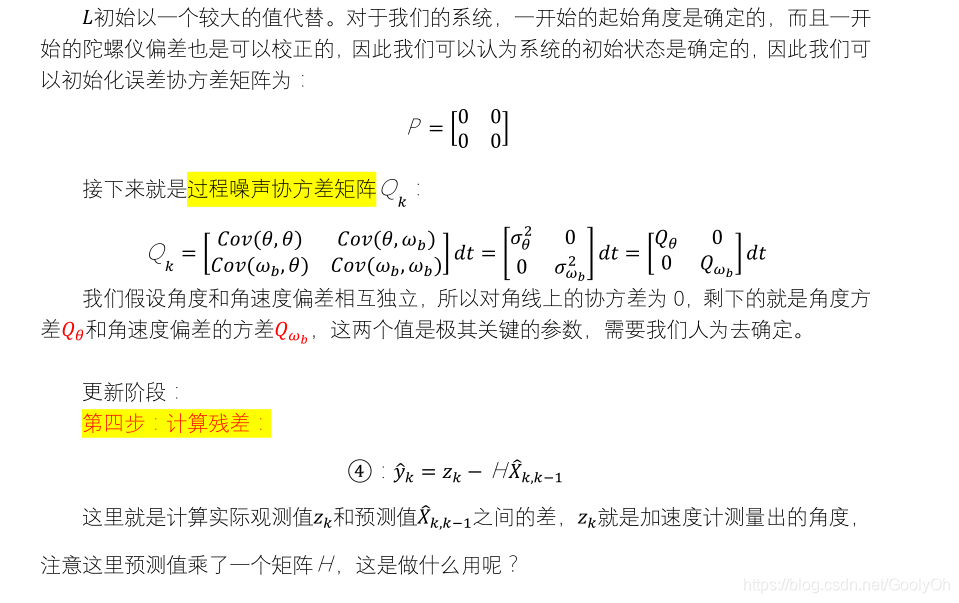
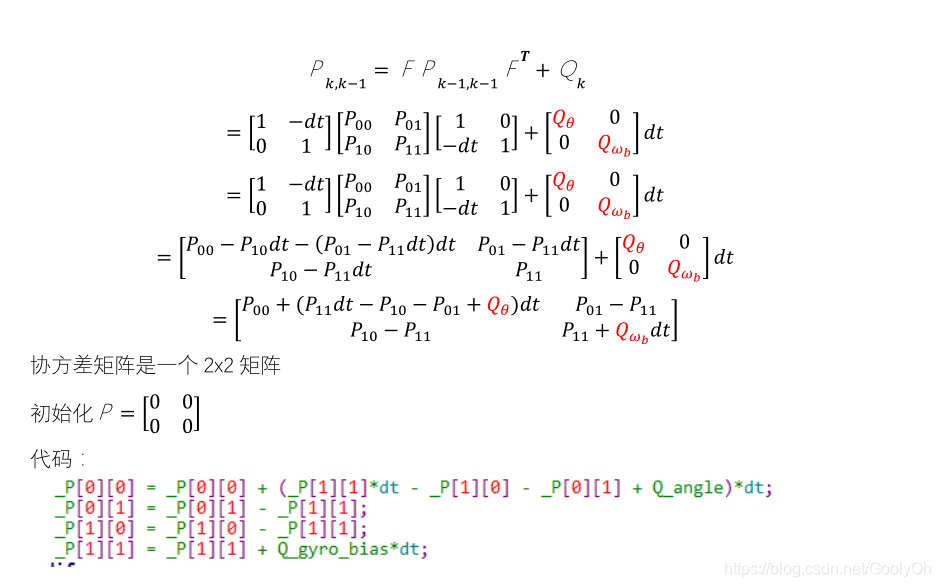
2、 P 矩阵
3、 Q 矩阵
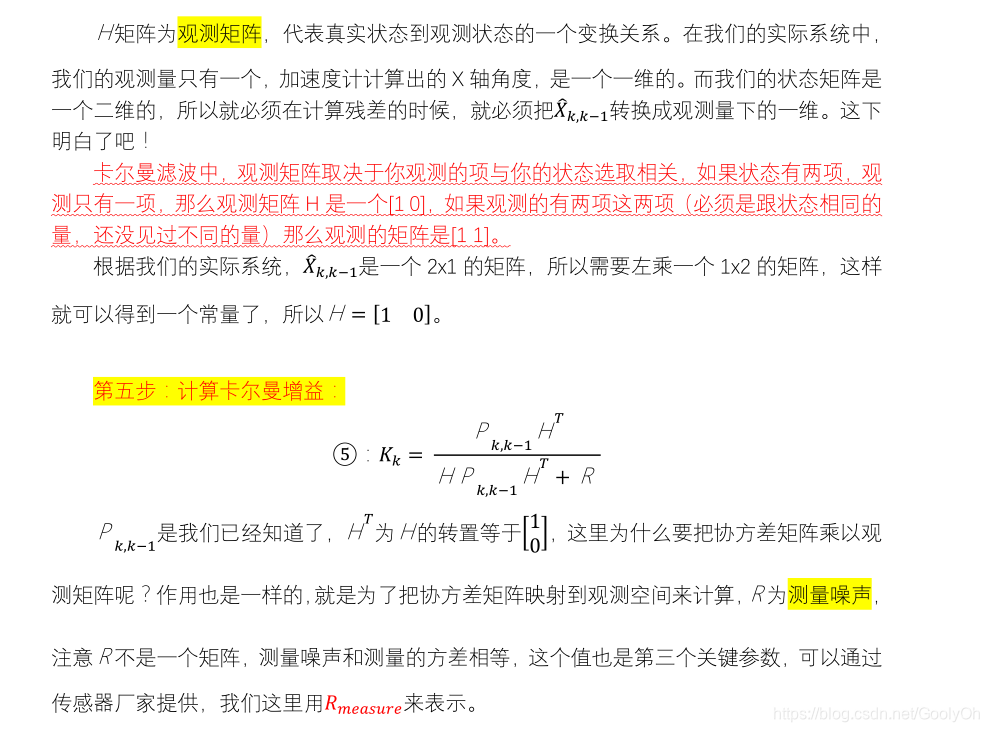
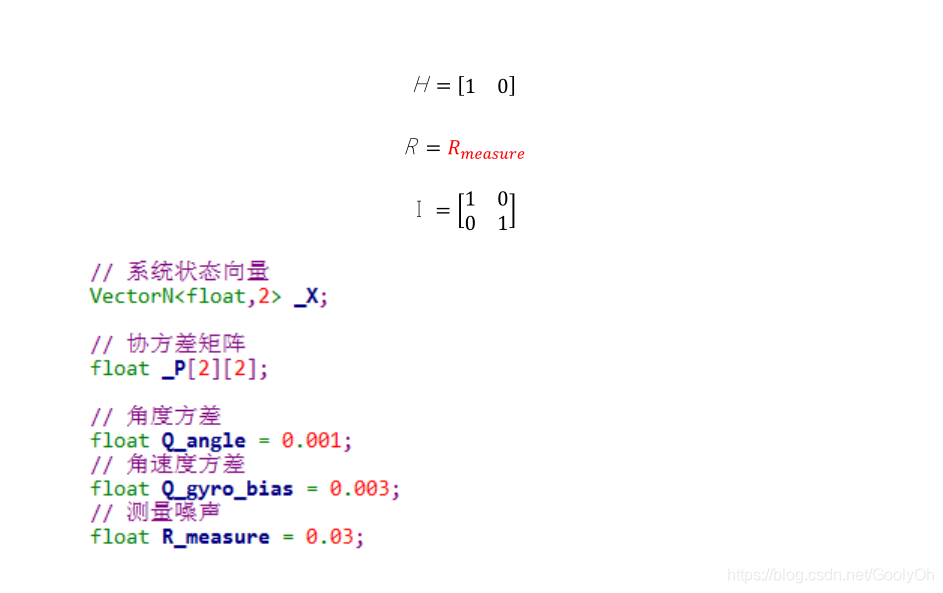
4、 H 矩阵
5、 R 矩阵
6、 I 矩阵
初始化矩阵
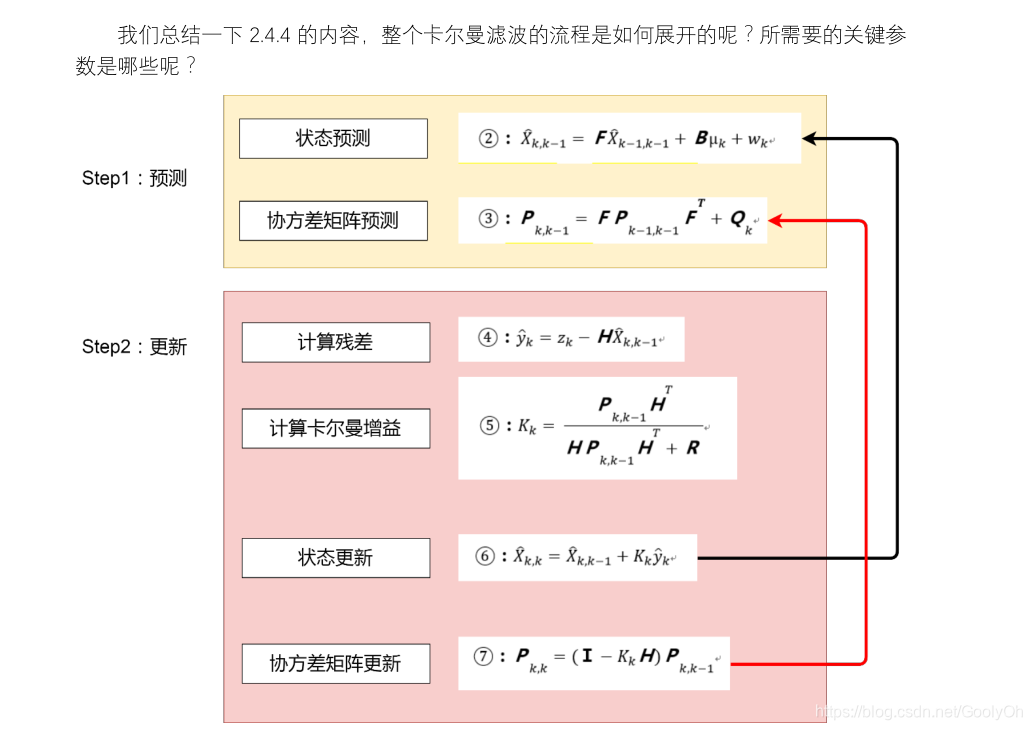
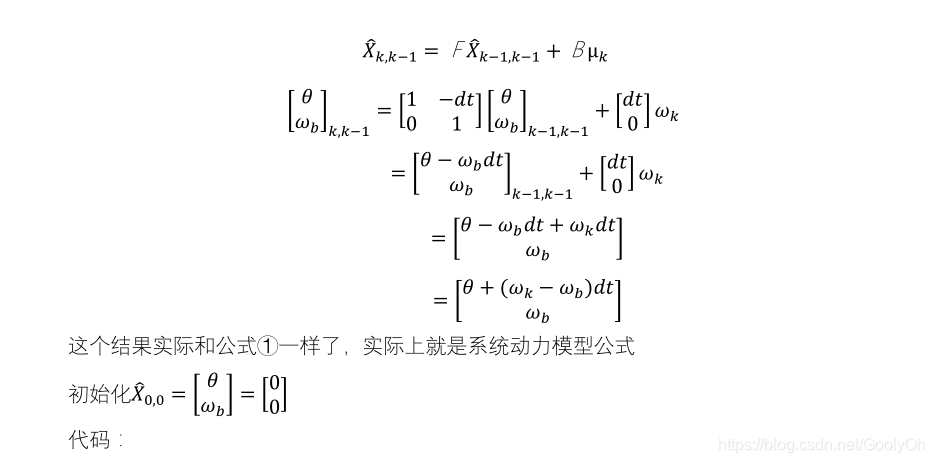
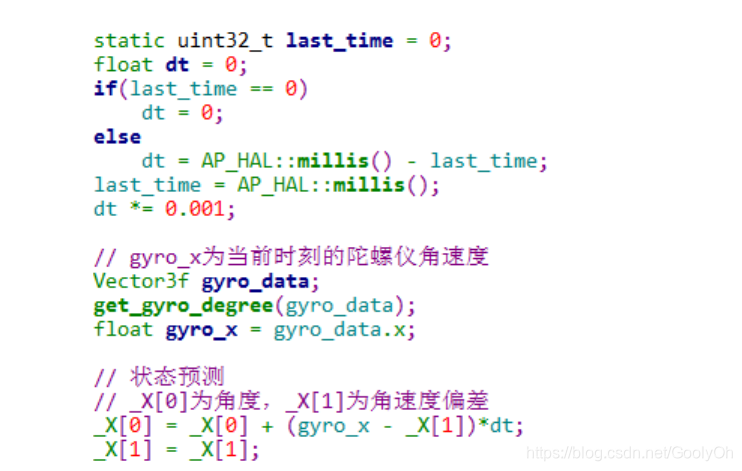
状态预测
协方差矩阵预测
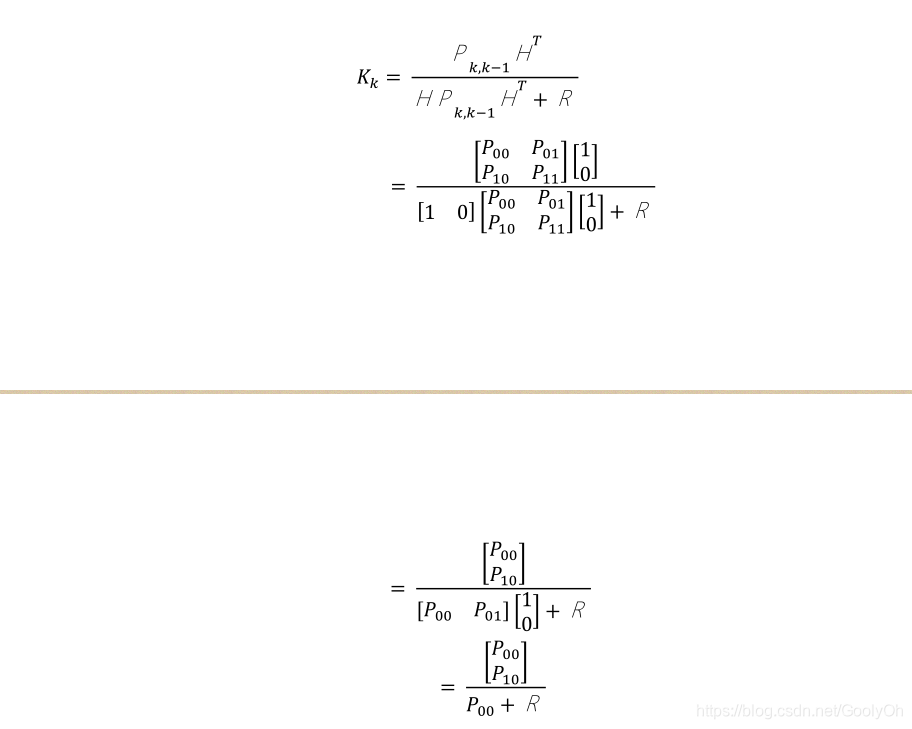
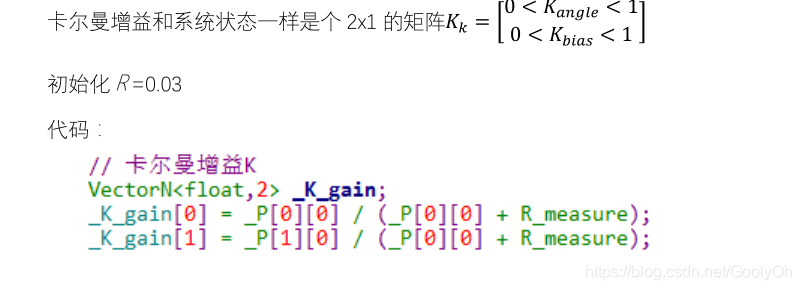
计算卡尔曼增益
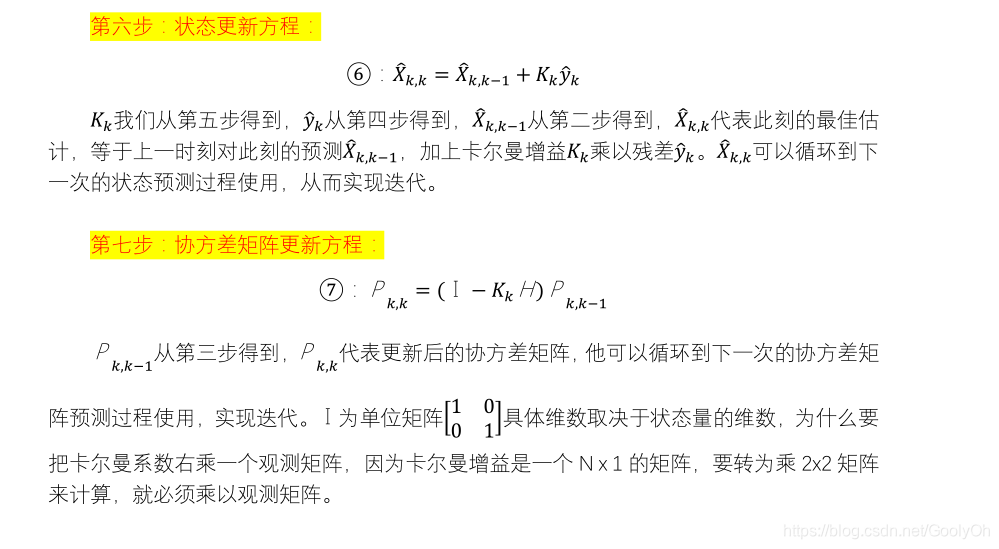
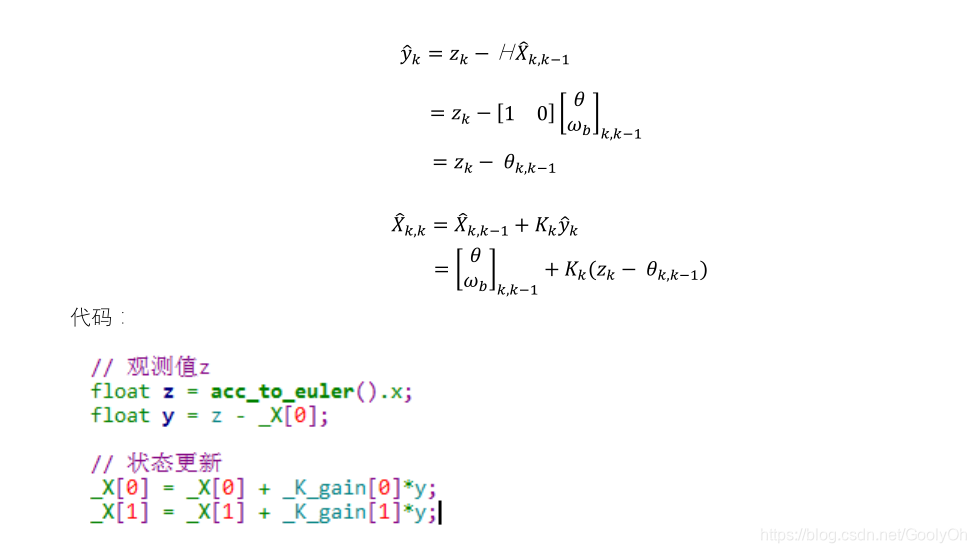
状态更新
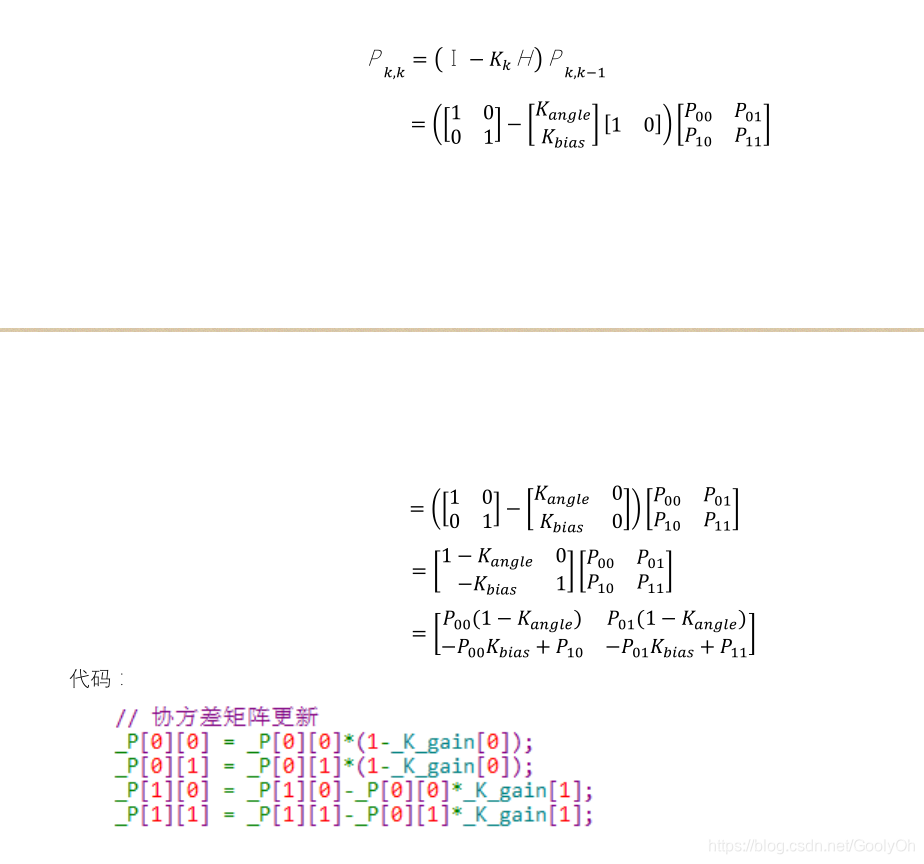
协方差矩阵更新
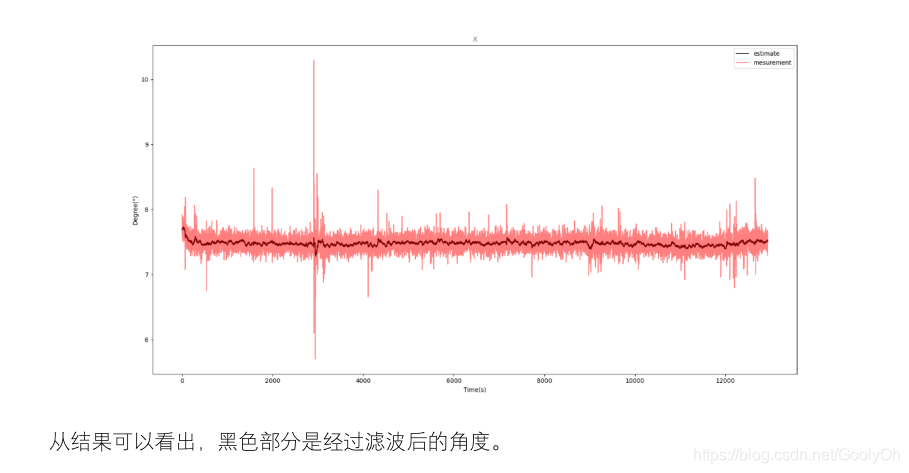
滤波效果
总结
现在你可以尝试把Y和Z轴的状态量加上,这个矩阵会变的稍微复杂一些,而且Z轴的角度变化加速度计无法纠正,需要通过磁力计来纠正,这个后面再EKF中会说到。不要被复杂的矩阵所吓倒,你可以用MATLAB或者PYTHON来自动生成代码,前提是你必须保证你的公式正确!

















 3151
3151

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









