







 本文介绍了摄像机畸变的基本原理,包括径向畸变和切向畸变,以及摄像机矩阵的概念。通过OpenCV和GML Camera Calibration获取摄像机的内参和畸变参数。接着,文章详细阐述了如何绘制反畸变网格,以实现对图像的校正。
本文介绍了摄像机畸变的基本原理,包括径向畸变和切向畸变,以及摄像机矩阵的概念。通过OpenCV和GML Camera Calibration获取摄像机的内参和畸变参数。接着,文章详细阐述了如何绘制反畸变网格,以实现对图像的校正。
基本原理
径向畸变

切向畸变

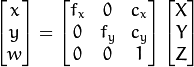
摄像机矩阵
畸变参数和摄像机矩阵获得
需要获得摄像机内部参赛矩阵和畸变参数,有两个方法
1) OpenCV
http://docs.opencv.org/2.4/doc/tutorials/calib3d/camera_calibration/camera_calibration.html
2) GML Camera Calibration
http://graphics.cs.msu.ru/en/node/909
绘制反畸变网格
class Mesh{
short row = 30;
short col = 30;
public float[] vertices;
public float[] texcoord;
public short[] indices;
Mesh(){
vertices = new float[(row+1 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 9347
9347

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









