







激光雷达
根据扫描的方式,分为 机械式、半固态(混合固态)和固态三种。
半固态可以分为一维扫描和二维扫描;
固态激光雷达有OPA(相控阵)和Flash(泛光面阵式)。
-
机械式激光雷达:通过电机带动光机结构整体 360° 旋转。是最经典且最为成熟的激光方案。但是利用传统分立式设计的机械雷达体积大且降本空间有限,并不适用于车规级量产市场。
-
半固态(现阶段量产车的主流方案):收发 + 一维或二维扫描,共同之处是 通过内部运动的反射镜来改变激光的方向。
-
二维扫描:分为MEMS和二维旋转
-
MEMS:厘米尺度的振镜,通过悬臂梁在横纵两轴高速周期运动,从而改变激光反射方向,实现扫描。
优点:简化了扫描结构,只需要控制微振镜的偏转角度改变扫描路径,只需要几个激光器就能达到等效于机械式更多线束激光的覆盖区域和点云密度。难点:悬臂梁转动角度有限,导致单个振镜视角太小,需要多台拼接才能实现大场视角覆盖,导致点云图像在叠加边缘出现不均匀的畸变和重叠,加大后续算法处理难度。
-
二维转境:由一个不断在横轴旋转的多边形棱镜和一个可以在纵轴摆动的镜子组成。不断旋转的多边形棱镜可以让光源实现水平扫描,纵轴摆镜可以改变光源的垂直扫描方向。
-
-
一维扫描:仅在水平方向上低速转动的反射镜来改变光线方向,获得视角覆盖,稳定性和可靠性更高。
缺点:一维,且扫描线数较少。(但是使用足够多的激光器就可以解决,目前前沿的芯片化技术能够在几颗厘米级的芯片上集成128组 激光收发模块。
-
-
固态 - 未来的重要方向 - 面阵收发 + 无运动部件 - OPA和Flash两种技术路线
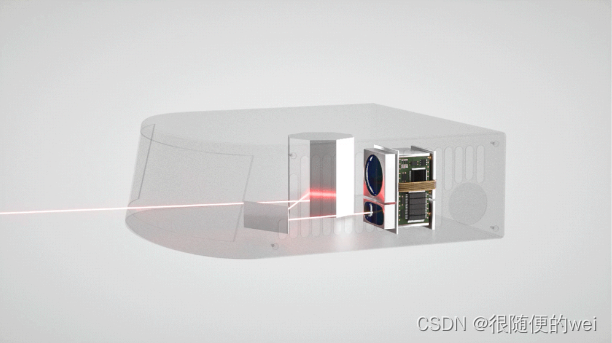
无论是机械式还是半固态,都是收发模块搭配一种机械运动的扫描模块,只要内部有运动部件,就不能算是纯固态。而且归根结底,扫描模块只是一个机械部件,真正决定激光雷达性能的本质,是其收发模块。
只有在内部没有任何运动部件的,才是纯固态激光雷达。这种激光雷达结构最简单,集成度最高。- OPA:通过多个激光发射单元组成发射阵列,通过调节发射阵列中各个单元的相位差,来改变激光光束的发射角度。
- Flash:通过高密度的激光源阵列,像手电筒一样,能够在短时间内发射出覆盖一片区域的激光,并用高灵敏度的接收器来构建三维图像。
由于固态激光雷达取消了复杂 和 高频转动的机械结构,不仅能够降低物料和量产成本,也能提升产品可靠性、生产效率和一致性。
- 缺点:功率密度低,探测距离短。但是固态激光雷达的近距补盲能与半固态激光雷达的远距感知相组合,打造出完整的车规级激光雷达解决方案。


















 1870
1870

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











