






意义:
旋转矩阵自身是带有约束的(正交且行列式为1)。它们作为优化变量时,会引入额外的约束,使优化变得困难。通过李群—李代数间的转换关系,我们希望把位姿估计变成无约束的优化问题,简化求解方式。
李代数的定义和相互转换关系
由于是三维向量,我们可以定义它的模长和方向,分别记作θ和a,于是有
=θa。这里a是一个长度为1的方向向量,即|al||=1。
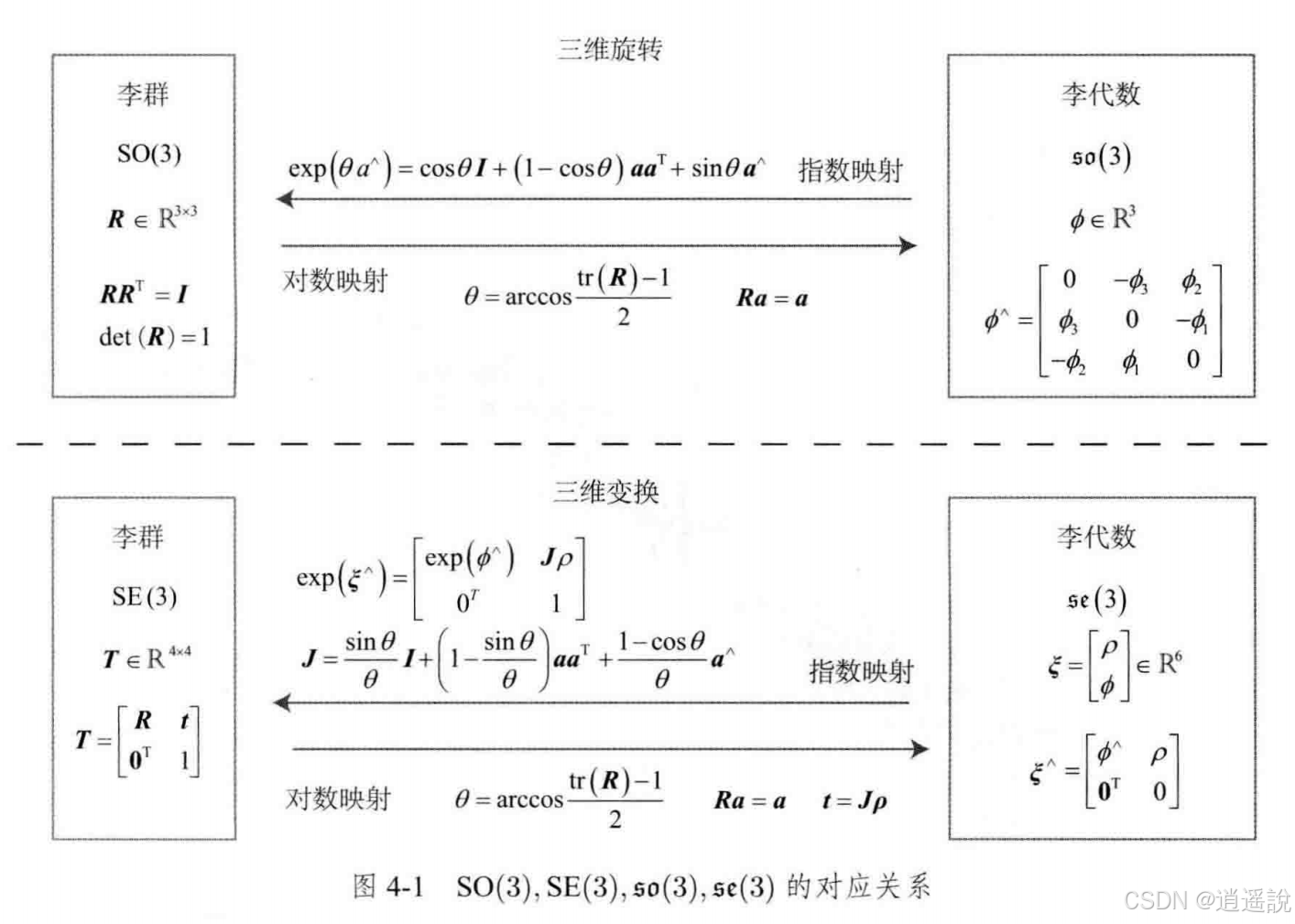
这表明,so(3)实际上就是由所谓的旋转向量组成的空间,而指数映射即罗德里格斯公式。通过它们,我们把so(3)中任意一个向量对应到了一个位于SO(3)中的旋转矩阵。反之,如果定义对数映射,也能把SO(3)中的元素对应到so(3)中。
指数映射有何性质呢?是否对于任意的R都能找到一个唯一的φ?很遗憾,指数映射只是一个满射,并不是单射。这意味着每个SO(3)中的元素,都可以找到一个so(3)元素与之对应;但是可能存在多个so(3)中的元素,对应到同一个SO(3)。至少对于旋转角θ,我们知道多转360°和没有转是一样的——它具有周期性。但是,如果我们把旋转角度固定在士π之间,那么李群和李代数元素是一一对应的。
李代数求导和扰动模型
使用李代数解决求导问题的思路分为两种:
1.用李代数表示姿态,然后根据李代数加法对李代数求导。
2.对李群左乘或右乘微小扰动,然后对该扰动求导,称为左扰动和右扰动模型。
李代数求导:
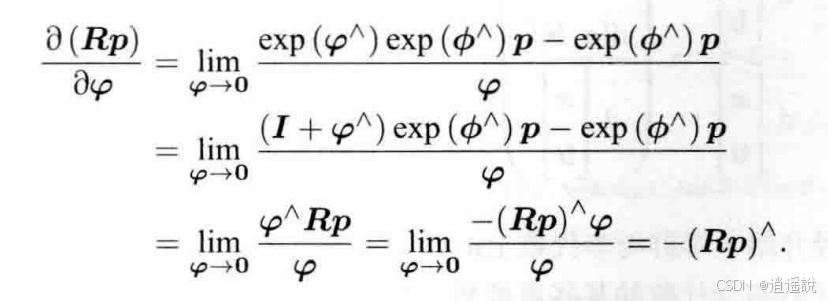
考虑SO(3)上的情况。假设我们对一个空间点p进行了旋转,得到了Rp。现在,要计算旋转之后点的坐标相对于旋转的导数,推导出
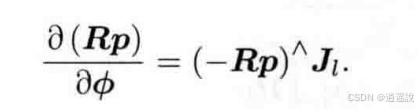
不过,由于这里仍然含有形式比较复杂的J,我们不太希望计算它。而下面要讲的扰动模型则提供了更简单的导数计算方式
扰动模型(左乘):
另一种求导方式是对R进行一次扰动△R,看结果相对于扰动的变化率。这个扰动可以乘在左边也可以乘在右边,最后结果会有一点儿微小的差异,我们以左扰动为例。设左扰动△R对应的李代数为φ。然后,对φ求导,即
内容参考:slam十四讲第二版

















 112
112

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









