







报错一
报错内容:
['test']: The following errors were found in the model test.
原因:
- ['test']: In the dynamically coupled component containing Revolute Joint 'test/Revolute Joint', there are fewer joint primitive degrees of freedom with automatically computed force or torque (0) than with motion from inputs (3). The prescribed motion trajectories in this component may not be achievable. Solve this problem by reducing the number of joint primitives with motion from inputs or increasing the number of joint primitives with automatically computed force or torque. Resolve this issue in order to simulate the model.
报错原因:由报错内容“ there are fewer joint primitive degrees of freedom with automatically computed force or torque (0) than with motion from inputs (3).”可知,模型文件中automatically computed force or torque 的关节是0个,而有运动输入的关节是3个,所以,只要将automatically computed force or torque的关节也设置成3个即可,需要注意的是,关节不需要是同一个关节,只需要保证automatically computed force or torque关节的个数和提供运动输入的关节个数相等就可以。
示例解析:如图一所示的模型,三个旋转关节和三个连杆,三个旋转关节的设置为图二所示,运行模型文件后会报上述错误。
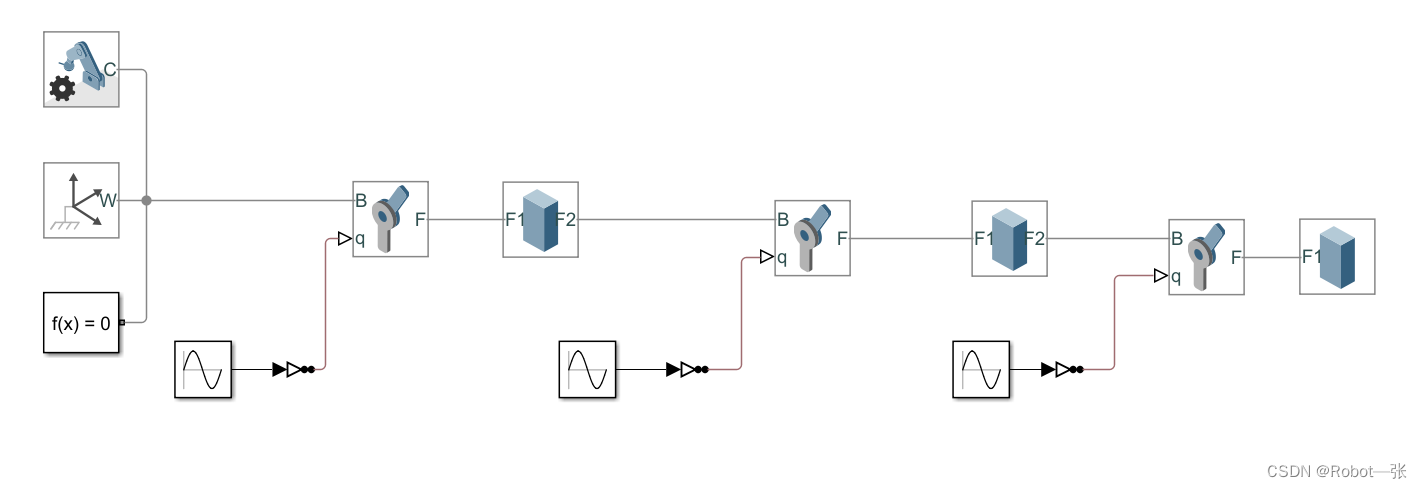
图一

图二
将三个旋转关节需按照如图三所示的更改即可,由此可知,三个旋转关节中,Automatically Computed的Torque和Provided by Input的Motion都是三个,保证其个数相等。
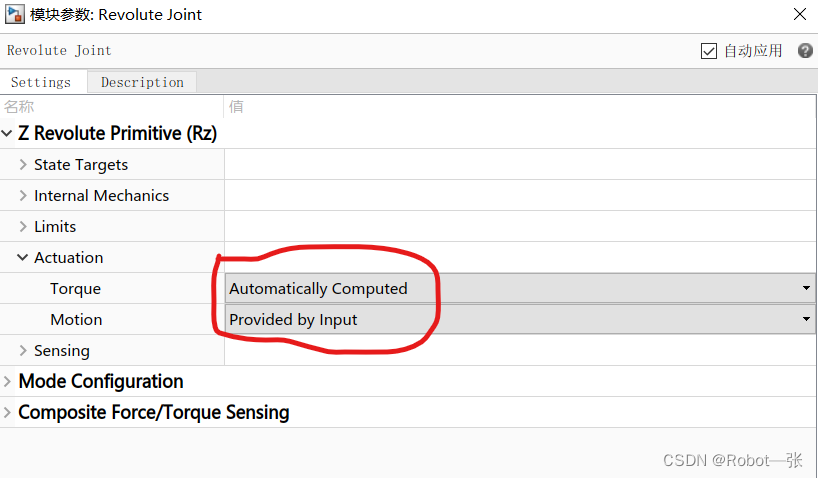
图三
报错二
报错内容:
['test']: The following errors were found in the model test.
原因: ['test']: Invalid actuation specification. Each kinematic loop must contain at least one joint that has no motion from input and no automatically computed forces or torques among its primitives. Fix this problem by configuring such a joint within this kinematic loop: Planar Joint 'test/Planar Joint' Planar Joint 'test/Planar Joint' Planar Joint 'test/Planar Joint' Planar Joint 'test/Planar Joint' Resolve this issue in order to simulate the model.
报错原因:由报错内容“Each kinematic loop must contain at least one joint that has no motion from input and no automatically computed forces or torques among its primitives.”可知,对于闭环的运动链,必须添加一个焊接关节“weld joint”,
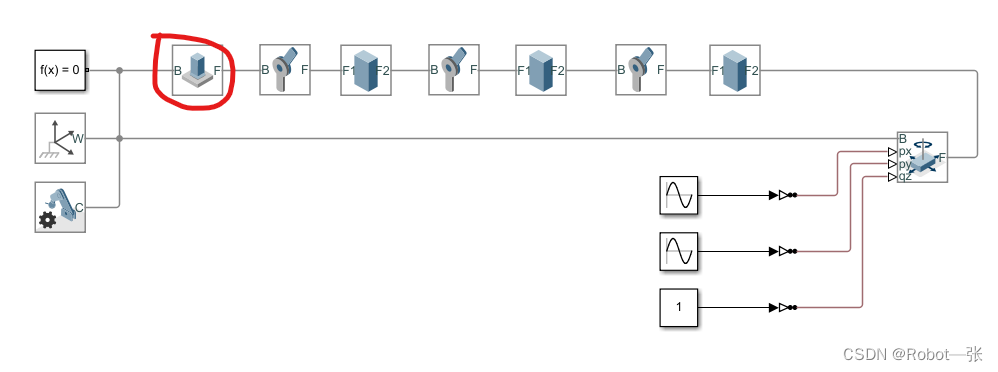
示例解析:如图四所示,模型文件中所示的模型是一个闭环运动链,三个连杆串联,第一个连杆(红色圈)的F1和世界坐标系(紫色圈)通过Revolute Joint(黄色圈)相连,第三个连杆(红色圈)的F2也和世界坐标系(紫色圈)通过Planar Joint(黄色圈)相连,所以其是一个闭环运动链,

图四
这个时候运行图四所示的模型会报上诉错误,我们需要在运动链上添加一个焊接关节weld joint即可,如图五所示。
图五
未完待续。。。。















 663
663











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









