







import numpy as np
import matplotlib.pyplot as plt
class kalman_filter2:
def __init__(self,Q,R):
self.Q = Q
self.R = R
self.P_k_k1 = 1
self.Kg = 0
self.P_k1_k1 = 1
self.x_k_k1 = 0
self.ADC_OLD_Value = 0
self.Z_k = 0
self.kalman_adc_old=0
def kalman(self,ADC_Value):
self.Z_k = ADC_Value
if (abs(self.kalman_adc_old-ADC_Value)>=60):
self.x_k1_k1= ADC_Value*0.382 + self.kalman_adc_old*0.618
else:
self.x_k1_k1 = self.kalman_adc_old;
self.x_k_k1 = self.x_k1_k1
self.P_k_k1 = self.P_k1_k1 + self.Q
self.Kg = self.P_k_k1/(self.P_k_k1 + self.R)
kalman_adc = self.x_k_k1 + self.Kg * (self.Z_k - self.kalman_adc_old)
self.P_k1_k1 = (1 - self.Kg)*self.P_k_k1
self.P_k_k1 = self.P_k1_k1
self.kalman_adc_old = kalman_adc
return kalman_adc
class kalman_filter:
def __init__(self,Q,R):
self.Q = Q
self.R = R
self.P_k_k1 = 1
self.Kg = 0
self.P_k1_k1 = 1
self.x_k_k1 = 0
self.ADC_OLD_Value = 0
self.Z_k = 0
self.kalman_adc_old=0
def kalman(self,ADC_Value):
self.Z_k = ADC_Value
if (abs(self.kalman_adc_old-ADC_Value)>=60):
self.x_k1_k1= ADC_Value*0.382 + self.kalman_adc_old*0.618
else:
self.x_k1_k1 = self.kalman_adc_old;
self.x_k_k1 = self.x_k1_k1
self.P_k_k1 = self.P_k1_k1 + self.Q
self.Kg = self.P_k_k1/(self.P_k_k1 + self.R)
kalman_adc = self.x_k_k1 + self.Kg * (self.Z_k - self.kalman_adc_old)
self.P_k1_k1 = (1 - self.Kg)*self.P_k_k1
self.P_k_k1 = self.P_k1_k1
self.kalman_adc_old = kalman_adc
return kalman_adc
def np_move_avg(a,n,mode="same"):
return(np.convolve(a, np.ones((n,))/n, mode=mode))
LEN = 500
if __name__ == '__main__':
kalman_filter = kalman_filter(0.001,0.1)
kalman_filter2 = kalman_filter2(0.001,3.9)
# a= [100]*200
a= []
for i in range(LEN//2):
a.append(100-i*0.1)
for i in range(LEN//2):
a.append(200-i*0.1)
array = np.array(a)
s = np.random.normal(0, 15, LEN)
test_array = array + s
kalman1=[]
kalman2=[]
smooth=[]
for i in range(LEN):
kalman1.append(kalman_filter.kalman(test_array[i]))
for i in range(LEN):
kalman2.append(kalman_filter2.kalman(test_array[i]))
smooth = np_move_avg(test_array, 20)
plt.plot(kalman1, label='kalman1')
plt.plot(kalman2, label='kalman2')
plt.plot(smooth, label='smooth')
plt.plot(array)
plt.plot(test_array)
plt.legend()
plt.show()
# help(np.random.normal)
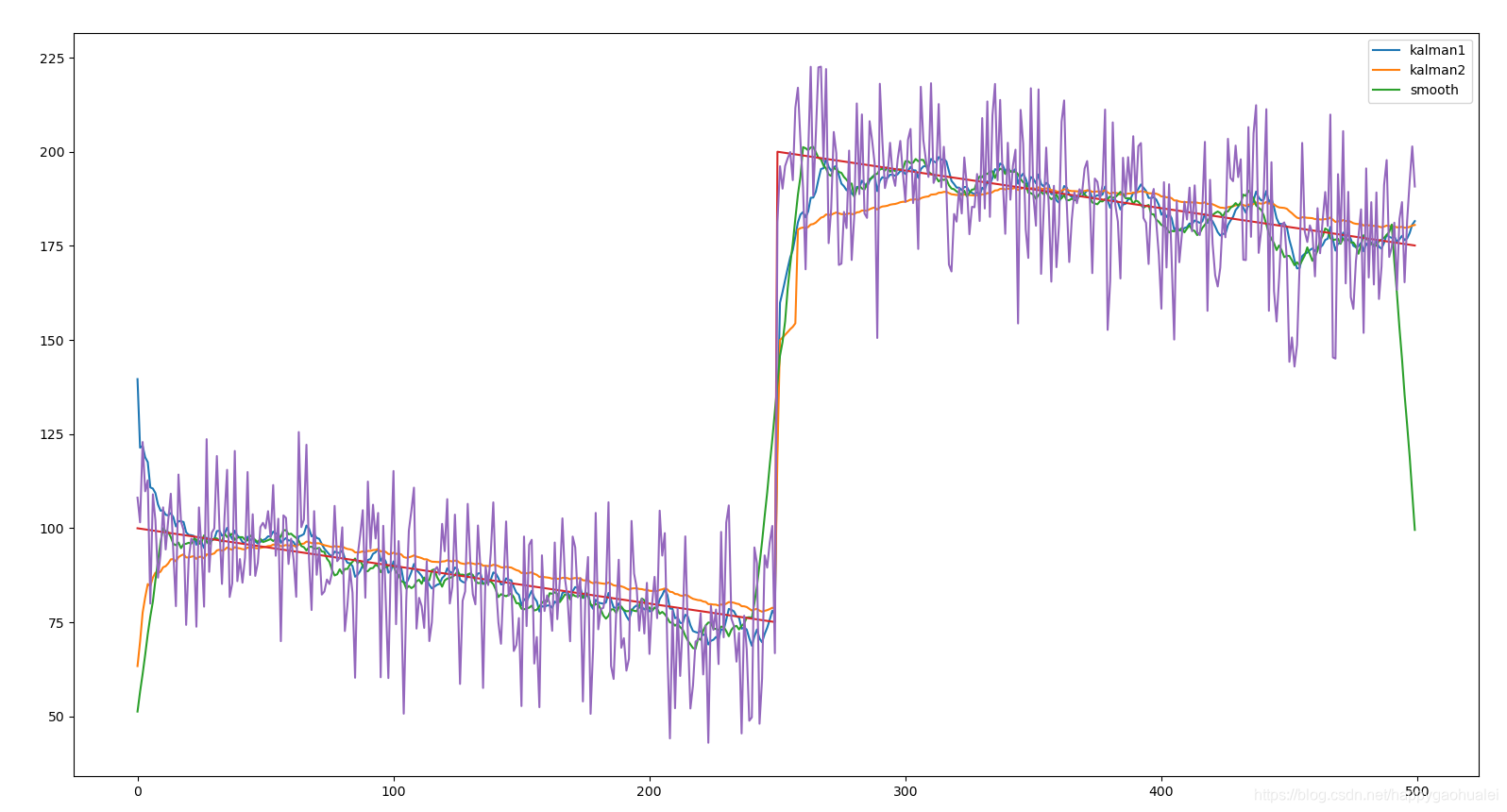
小结:卡尔曼Q R值调试是个技术活,对滤波效果影响很大

















 1021
1021

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









