









目录
1.课题概述
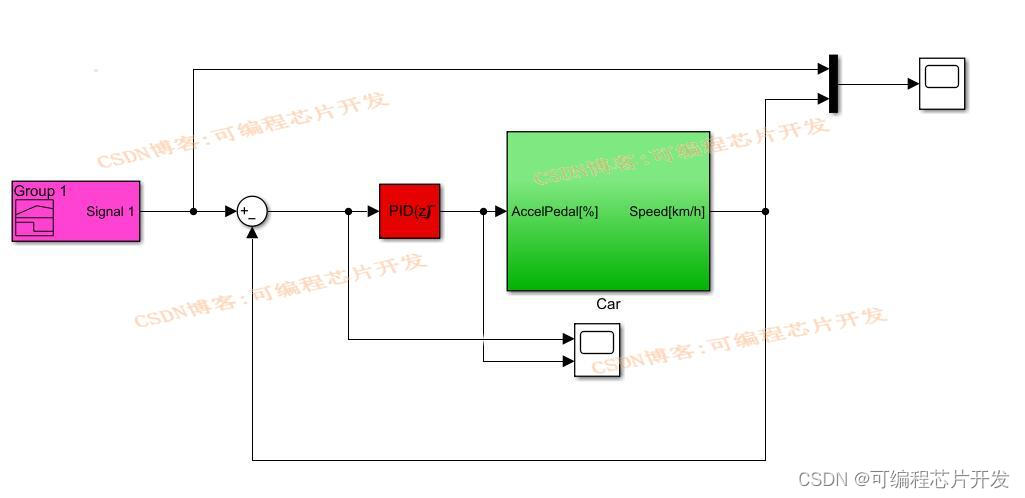
基于PID控制器的车辆控制系统simulink建模与仿真,包括PID控制器和车辆模型。
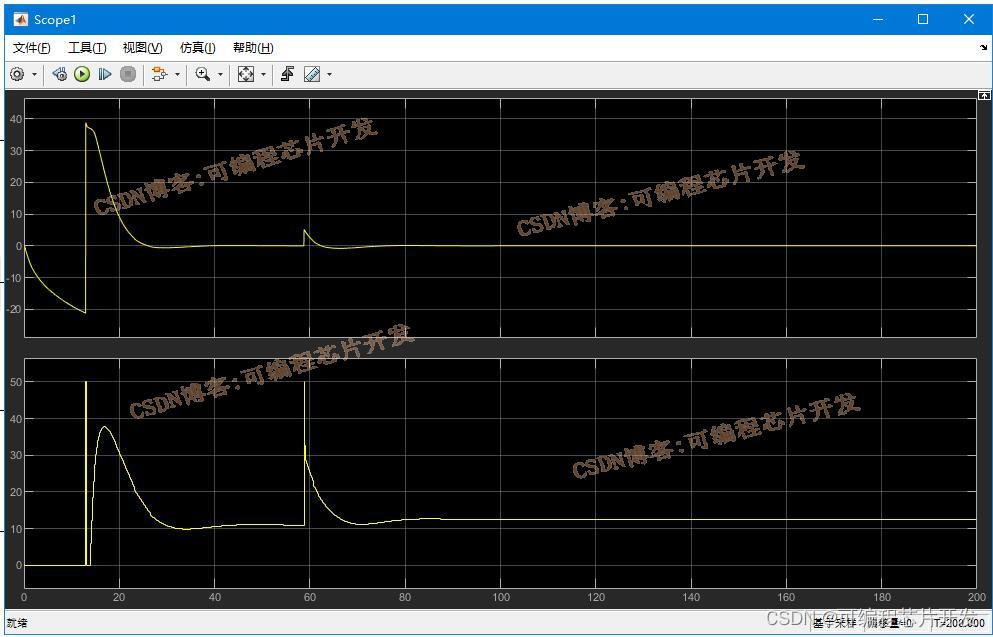
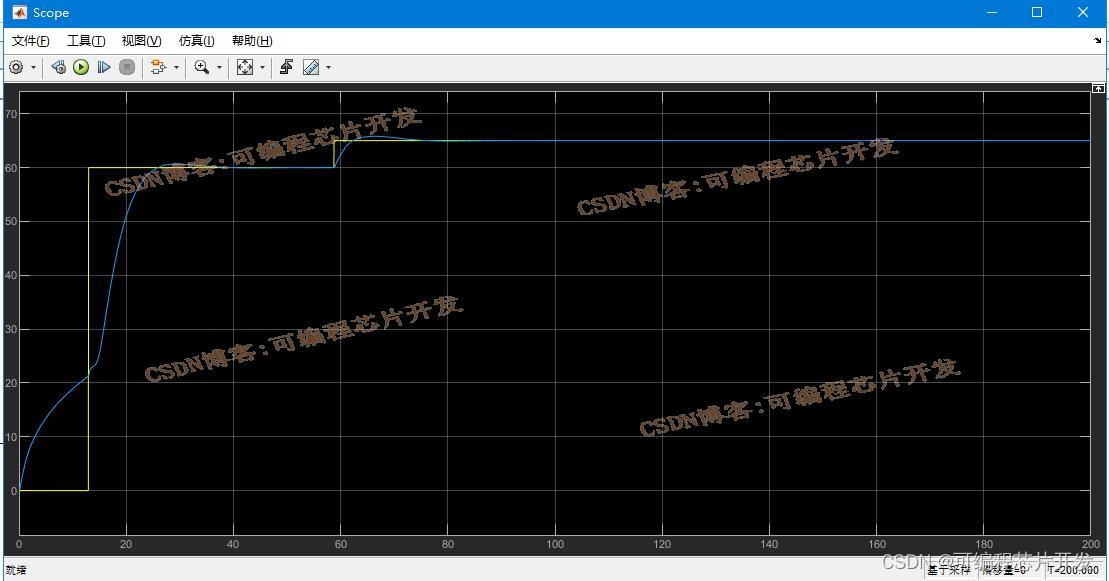
2.系统仿真结果
(完整程序运行后无水印)
3.核心程序与模型
版本:MATLAB2022a
0069
4.系统原理简介
PID控制器(比例-积分-微分控制器)是一种广泛应用在控制理论与工程实践中的闭环控制策略,特别是在车辆控制系统中,它被用来维持期望的性能指标,如车速控制、方向稳定、悬架调整等。PID控制器通过实时计算误差并根据误差的比例(P)、积分(I)和微分(D)分量来调整控制输入,从而有效地纠正偏差,实现系统的稳定运行。
PID控制器的输出u(t)是误差信号e(t)即期望值r(t)与实际输出y(t)之差的函数,可以表示为:
![]()
其中,KP、KI、KD分别为比例系数、积分系数和微分系数,它们共同决定了控制器的响应特性。
1.比例控制(P): 直接根据误差的大小成比例地调整输出,可以迅速响应误差,但无法消除稳态误差。 ![]()
2.积分控制(I): 积累过去的误差,随着时间的推移,即使误差很小,也会逐渐累积起来,有助于消除稳态误差。
![]()
3.微分控制(D): 根据误差变化的速度调整输出,有助于预测未来趋势,减少超调,提高系统的稳定性。
![]()
以车辆速度控制为例,假设期望速度为vd,实际速度为v,则误差e(t)=vd−v。PID控制器的目标是调整油门或刹车的控制信号u(t),以使实际车速尽可能接近期望速度。
PID控制器的性能高度依赖于参数KP、KI和KD的选取,这些参数的确定通常需要通过实验或特定的整定方法,如齐纳-尼克尔斯方法(Ziegler-Nichols method)、经验法则或自整定算法。
5.完整工程文件
v


















 522
522

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











