






基于MPC的智能车运动预测和控制算法
Motion predication; Kinematic model
可加入求解步骤进而得到自定义成本函数的可扩展MPC控制器;
模型状态空间方程线性化和离散化;
可与风险场/人工势场/决策/轨迹跟踪等算法集成;
需要用到车辆运动学模型的算法
ID:49180702845671870
MMiL
基于MPC的智能车运动预测和控制算法
摘要:本文针对智能车运动预测和控制问题,提出了一种基于模型预测控制(MPC)的算法。该算法将运动预测和控制集成到一个框架中,通过求解多步骤的最优化问题来实现对车辆的精确控制。本文首先介绍了MPC算法的基本原理和特点,然后详细阐述了算法的关键步骤,包括运动预测、模型状态空间方程线性化和离散化、自定义成本函数的求解以及集成其他算法。最后,通过实验证明了该算法在智能车运动预测和控制中的有效性和优势。
关键词:MPC算法;运动预测;控制器;状态空间方程;离散化;成本函数;集成算法
-
引言
随着智能车技术的不断发展,如何实现对车辆的精确控制成为了一个重要的研究方向。智能车运动预测和控制算法能够利用车辆的模型进行预测,并通过相应的控制策略对车辆进行控制,从而实现对车辆运动的精确控制。本文基于MPC算法,提出了一种综合考虑车辆的运动预测和控制的智能车控制算法。 -
MPC算法的基本原理和特点
MPC算法是一种优化控制算法,其基本原理是通过求解多步骤的最优化问题来实现对物理系统的控制。MPC算法具有以下几个特点:
2.1 运动预测和控制集成
MPC算法将运动预测和控制集成到一个框架中,通过预测车辆未来的运动轨迹,从而制定相应的控制策略。
2.2 多步骤最优化问题
MPC算法通过求解多步骤的最优化问题,来寻找使得系统状态与预期状态之间差异最小的控制策略。这样可以实现对车辆运动的精确控制。
- 算法的关键步骤
3.1 运动预测
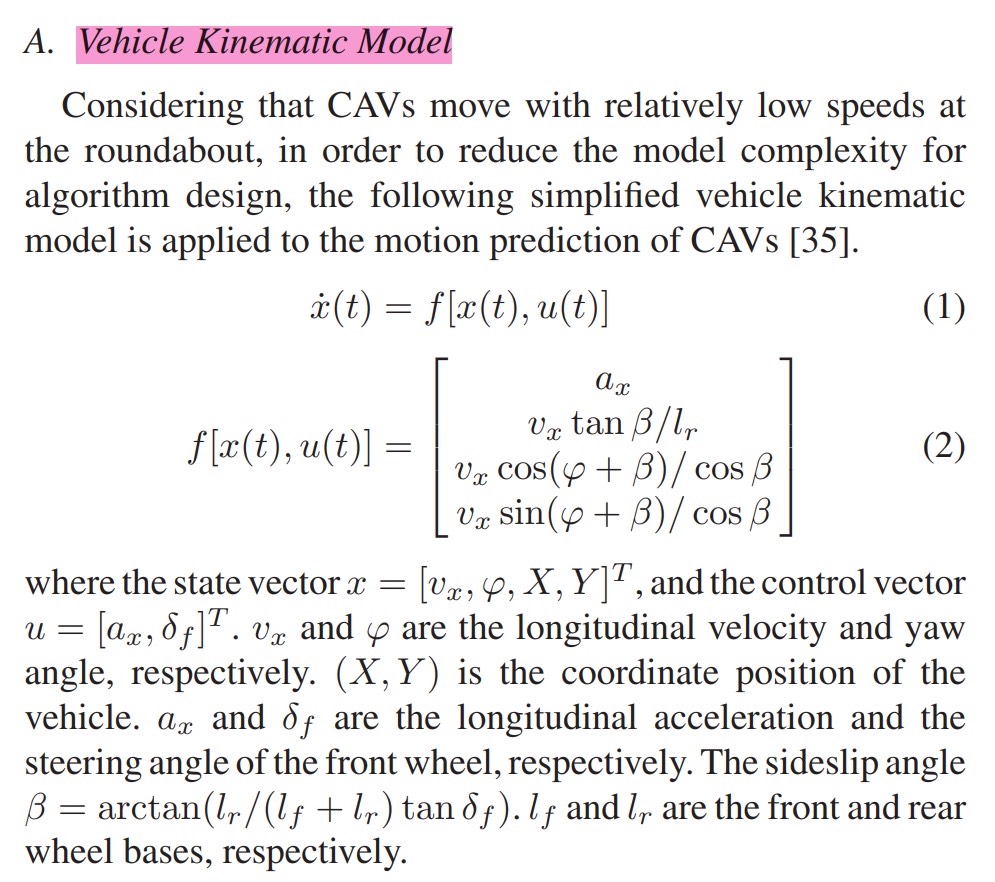
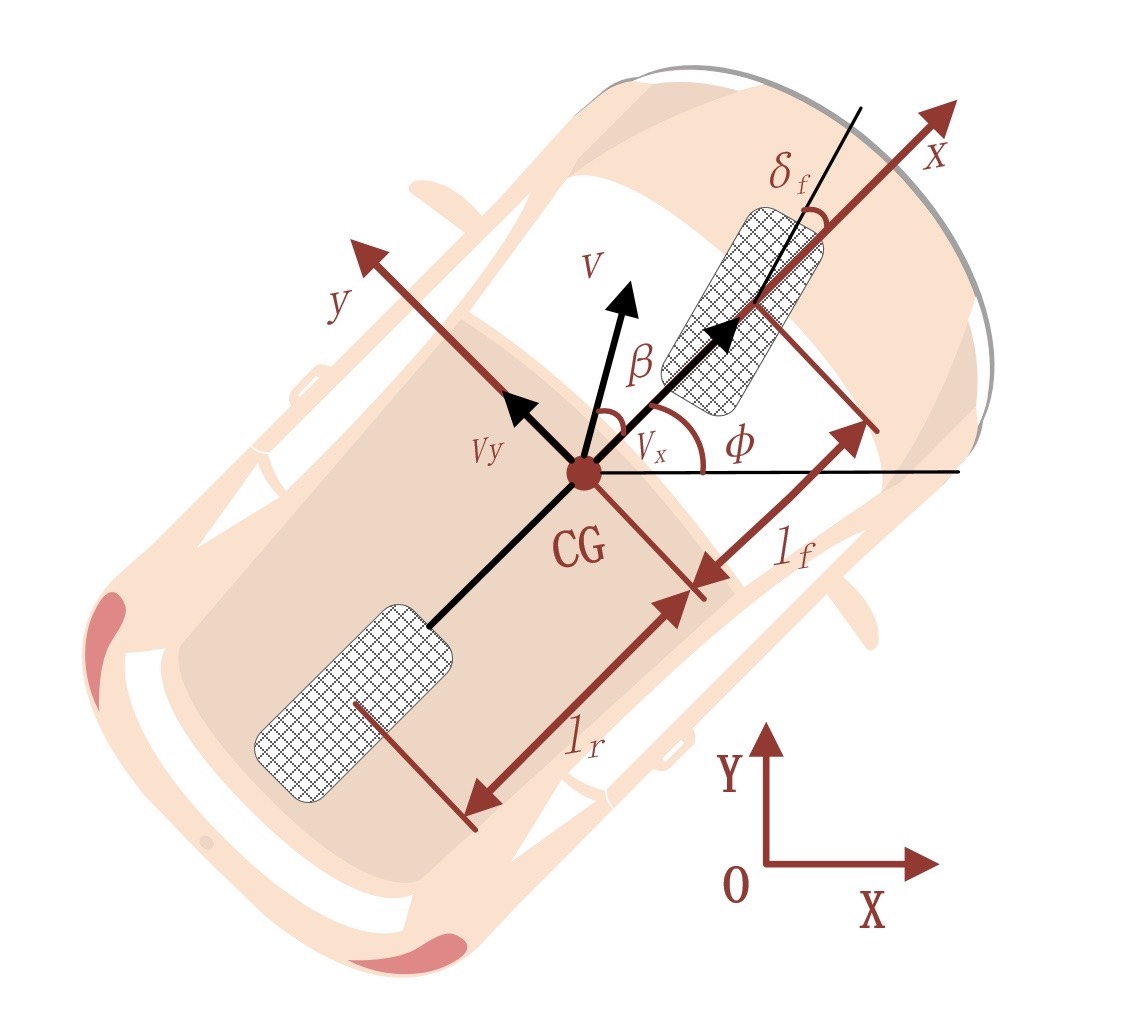
运动预测是MPC算法的核心步骤之一。在这一步骤中,需要利用车辆的运动学模型,结合当前的状态信息,预测车辆未来的运动轨迹。通过运动预测,可以得到车辆在未来一段时间内的位置、速度等信息,为后续的控制提供依据。
3.2 模型状态空间方程线性化和离散化
在MPC算法中,需要将车辆的运动模型转化为状态空间方程。这一步骤需要将非线性的运动模型进行线性化,并对状态方程进行离散化,以便于后续的数值求解。
3.3 自定义成本函数的求解
MPC算法的求解过程涉及到一个最优化问题,其中的目标函数即为自定义的成本函数。成本函数的设计对于控制效果至关重要,需要根据具体的应用场景和控制要求进行合理选择。本文提出了一种可扩展的MPC控制器,可以根据实际需求自定义成本函数,以满足不同的控制要求。
3.4 集成其他算法
MPC算法可以与其他算法进行集成,如风险场、人工势场、决策、轨迹跟踪等。通过集成其他算法,可以进一步提高智能车的控制精度和性能。
- 算法的实验验证
通过实验,我们验证了基于MPC的智能车运动预测和控制算法的有效性和优势。实验结果表明,该算法能够实现对智能车的精确控制,提高车辆的运动稳定性和安全性。
- 结论
本文基于MPC算法,提出了一种综合考虑智能车运动预测和控制的算法。通过运动预测和控制的集成,结合自定义的成本函数和集成其他算法的方式,实现了对智能车的精确控制。实验结果表明,该算法在智能车运动预测和控制中具有较好的效果和性能。未来的研究可以进一步优化算法的实时性和性能,以满足更高的应用要求。
参考文献:
[1] Wang F, Chen X, Chen L. Model predictive control for trajectory tracking of autonomous ground vehicles[J]. Control Engineering Practice, 2019, 85: 315-325.
[2] Liu Y, Cao D, Chen S, et al. Motion Planning and Control for an Autonomous Vehicle in a Dynamic Environment[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(11): 4218-4230.
[3] Yang Q, Zhang Y, Li C, et al. A Novel Hierarchical MPC Approach for Autonomous Vehicle Path Tracking[J]. IEEE Transactions on Intelligent Vehicles, 2019, 4(4): 624-635.
【相关代码 程序地址】: http://nodep.cn/702845671870.html















 726
726

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









