






各位朋友大家好。欢迎来到每日的前沿技术专栏。我们今天要给大家带来的技术讲解是一个叫Code-as_monitor的框架,它对于故障的检测呀、机器人实时状态的检测等等都是非常得厉害。
我们今天就来研究研究它具体能做哪些事情,以及它到底是怎么样来去完成的。
项目的主页可以见:https://zhoues.github.io/Code-as-Monitor/
OK,那废话不多说,我们直接进入正题!
一、Code-as-Monitor 能干什么
CaM 是一种全新的技术范式,主要用于机器人的故障检测,具备强大的反应式和主动式故障检测能力。
在实际应用中,它就像一个 “智能管家”,时刻关注着机器人的工作状态。
比如,当机器人执行 “把装有龙虾的平底锅放到炉子上,且不能让龙虾掉出来” 的任务时,CaM 能发挥巨大作用:
在反应式故障检测方面,一旦龙虾意外跳出平底锅,CaM 能迅速做出反应,识别出这是一个故障情况。就好像我们在炒菜时,突然发现菜掉出了锅,CaM 就相当于我们敏锐的眼睛,能及时察觉这个问题。
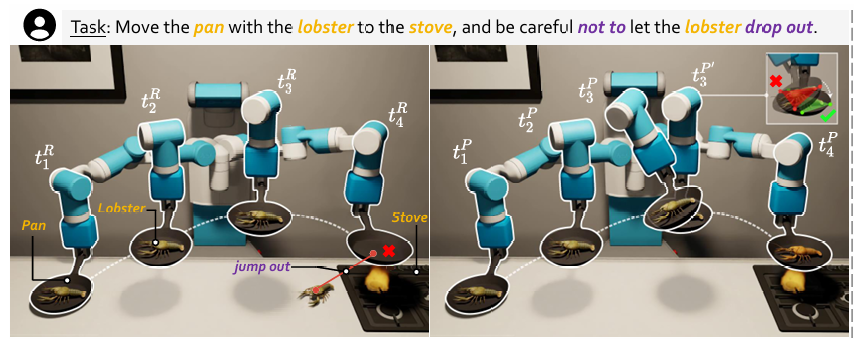
在主动式故障检测上,它能提前发现潜在的问题,比如当平底锅倾斜到一定角度,可能导致龙虾掉落时,CaM 能在问题发生之前就检测到,并及时进行纠正,避免龙虾掉落的情况发生。这就好比我们看到锅要歪了,提前伸手扶住,防止锅里的东西洒出来。
这样的能力,落地以后,应用场景非常广泛。例如:
1、在工业生产中,机器人在进行精密装配任务时,它可以检测机器人的操作是否符合要求,及时发现零件安装不到位、抓取力度不当等问题,避免产品出现质量缺陷。
2、在物流仓储领域,当机器人搬运货物时,CaM 能实时监测货物是否稳定,防止货物掉落损坏,保障物流流程的顺畅进行。在家庭服务场景中,机器人打扫卫生时,它可以确保机器人不会碰倒物品,或者在遇到障碍物时及时调整路线,提高服务的安全性和可靠性。
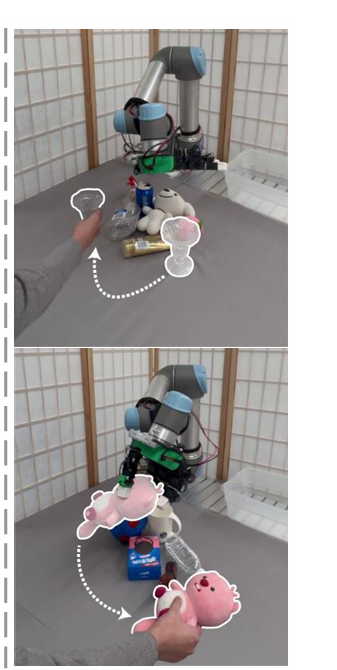
下图是在真实世界的一个例子:
二、为什么需要 Code-as-Monitor
随着人们对机器人期望的不断提高,希望它们在复杂环境中完成越来越复杂的任务,机器人出现故障的可能性也大大增加。比如在智能家居环境中,机器人可能需要同时处理多种任务,像收拾餐具、整理书架、清洁地面等。
然而,在这个过程中,由于环境的复杂性和不确定性,很容易出现各种故障。如果不能及时检测和预防这些故障,不仅任务无法完成,还可能会对周围的物品造成损坏。
传统的故障检测方法在处理开放集故障(即那些没有预先定义好的故障情况)时,往往显得力不从心。
虽然借助大语言模型(LLMs)和视觉语言模型(VLMs),一些研究实现了开放集反应式故障检测,但这些方法存在不少问题。一方面,执行速度较慢,就像一个反应迟钝的人,不能及时对故障做出反应;另一方面,检测精度也不高,容易出现误判的情况。
而开放集主动式故障检测在之前的研究中更是很少被涉及,因为它要求能够提前预见到潜在的故障原因,并进行高精度的实时监测,这对传统方法来说是一个巨大的挑战。
在这样的背景下,CaM 技术应运而生。它旨在打造一个能够同时实现反应式和主动式故障检测的框架,充分利用 VLMs 的强大泛化能力,同时还能以高效的实时监测精度来发现故障特征,满足了现代机器人在复杂任务环境下对故障检测的严格要求。
三、核心方法:如何实现强大的故障检测
1、将故障检测任务转化为时空约束满足问题
CaM 的核心思想之一,是把反应式和主动式故障检测任务统一转化为一组时空约束满足问题。
简单来说,就是给机器人的每个动作和任务设定一些规则和条件,这些规则和条件涉及到时间和空间两个维度。
比如,在 “把平底锅放到炉子上” 这个任务中,时空约束可能包括平底锅在移动过程中的位置、角度变化,以及到达炉子上的时间点等。只有当机器人的动作满足这些约束条件时,任务才算成功执行,否则就被视为出现故障。
通过这种方式,CaM 能够将复杂的故障检测问题转化为可以用数学和程序来描述和解决的问题。利用 VLMs 的强大能力,将这些时空约束转化为可执行的程序代码。这些代码就像是机器人的 “行动指南”,在任务执行过程中,不断地检查机器人的状态是否符合约束条件,从而实现对故障的实时监测。
2、关键模块:Constraint Generator、Painter 和 Monitor
CaM 主要由三个关键模块组成,分别是 Constraint Generator(约束生成器)、Painter(绘制器)和 Monitor(监测器),它们相互协作,共同完成故障检测任务。 我们下面来分别说一说:
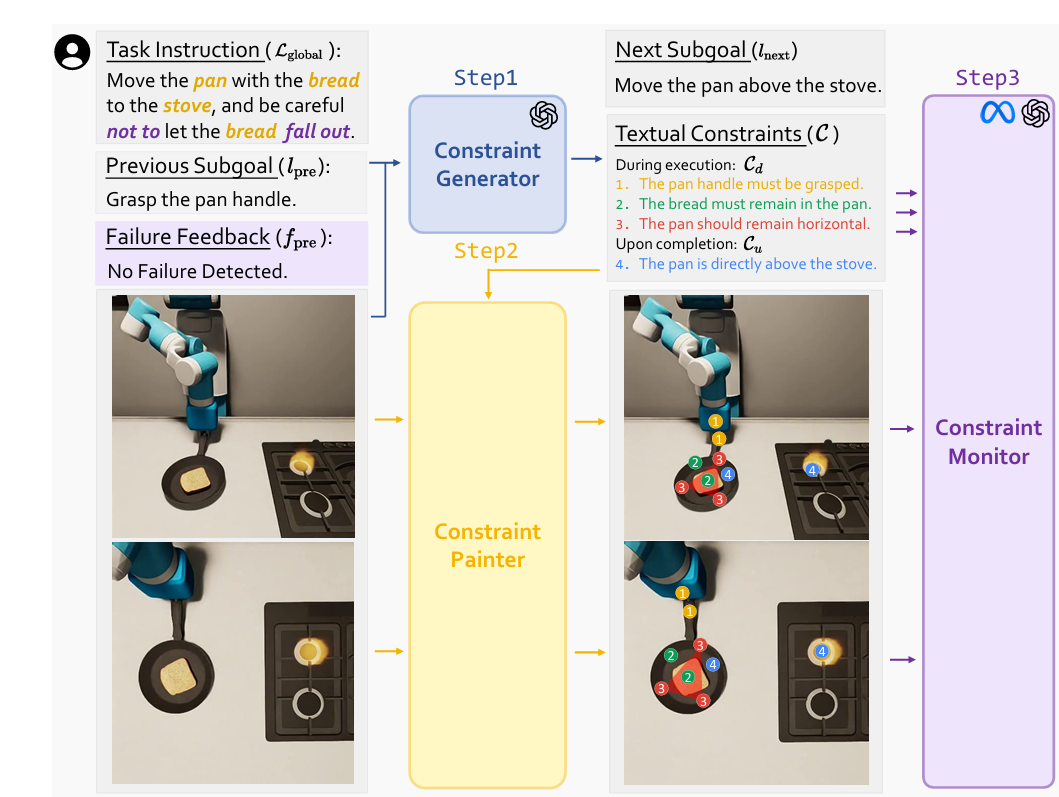
如上图所示。
-
Constraint Generator:这个模块就像是一个 “任务规划师”,它根据机器人当前的任务指令、之前的子目标执行情况、失败反馈以及多视图的 RGB-D 观察数据,来生成下一个子目标和相应的文本约束。当机器人要执行 “把装有面包的平底锅放到炉子上,且不能让面包掉出来” 的任务时,Constraint Generator 会分析当前场景,确定如 “先抓住平底锅的把手”“移动过程中保持平底锅水平” 等子目标,以及每个子目标对应的约束条件,比如 “抓住把手时,手与把手的位置关系要满足一定条件”“移动过程中,平底锅倾斜角度不能超过一定范围” 等。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









