






通过开发板来学习ROS2 21讲(基础环境配置)
简介
ROS2 21讲是古月居倾力打造的ROS2 的入门学习视频,相信有很多小伙伴也是通过ROS2 21讲入门的ROS2。在学习过程中,大家有可能是使用虚拟机/PC机来运行ROS2上的案例,但是假如大家手上有一块开发板,比如RDK X3/树莓派/JestonNano… 那么理应由开发板上手会更好了,毕竟我们最终都是将ROS2 部署到开发板上来实现一些功能。
本系列内容将以RDKX3/OriginBot机器人为例,将ROS2 21讲中的内容在板端实现一遍,根据大家的反馈,本系列将分别以Python3/C++的方式实现代码,并实现一样的功能供大家作为参考。
参考资料
ROS2 21讲视频 :【古月居】古月·ROS2入门21讲 | 带你认识一个全新的机器人操作系统_哔哩哔哩_bilibili
ROS2 21讲图文文档:ROS2入门教程 (guyuehome.com)
基础说明
在正式开始内容之前请大家先部署好自己的环境,我目前的软硬件环境如下:
- RDK X3/OriginBot,镜像为OriginBot v2.0.2
- PC端为Windows 11
连接板端环境
如果你之前没有接触过机器人相关内容,你将遇到第一个问题,就是如何连接到板端,这里推荐两个工具,大家可以根据情况选择不同的方式进行连接。
- 一种是通过MobXterm](https://mobaxterm.mobatek.net/download-home-edition.html)),这个软件支持串口、SSH等连接方式,下图为MobXterm的界面显示,进入镜像后会显示版本信息。
 另外一种即通过VSCode连接,这种方式也就是ROS2 21讲中介绍的方式,大家可以参考ROS2开发环境配置 - ROS2入门教程 (guyuehome.com)
另外一种即通过VSCode连接,这种方式也就是ROS2 21讲中介绍的方式,大家可以参考ROS2开发环境配置 - ROS2入门教程 (guyuehome.com)
配置网络环境
连接到板端后,大家可能会为了方便起见配置一个网络,由于这个镜像是服务器版本镜像是没有界面的,所以大家需要通过命令行的方式进行连接,命令如下:
#查找周围WIFIsudo nmcli device wifi rescan#打印WIFI列表sudo nmcli device wifi list#连接WIFIsudo wifi_connect "wifi名" "密码"以上操作适用于Ubuntu系统,大家可以参考使用。
内容简介
完成以上配置后,我们就基本完成了基础的环境搭建,可以正式开始ROS2 21讲的学习了。
这里再和大家强调,本系列文章为大家观看ROS2 21讲的补充内容,可以先观看视频和文档的同时配合本文看板端是如何操作的。
接下来给大家一一演示以下内容。

工作空间创建
在板端创建工作空间的流程和虚拟机端是一致的,本质上它们都是一个Ubuntu系统。
#创建dev_ws工作空间,src文件讲存放后续的功能包mkdir -p ~/dev_ws/srccd ~/dev_ws/src#此处拉取基础版本的课程代码git clone https://gitee.com/guyuehome/ros2_21_tutorials.git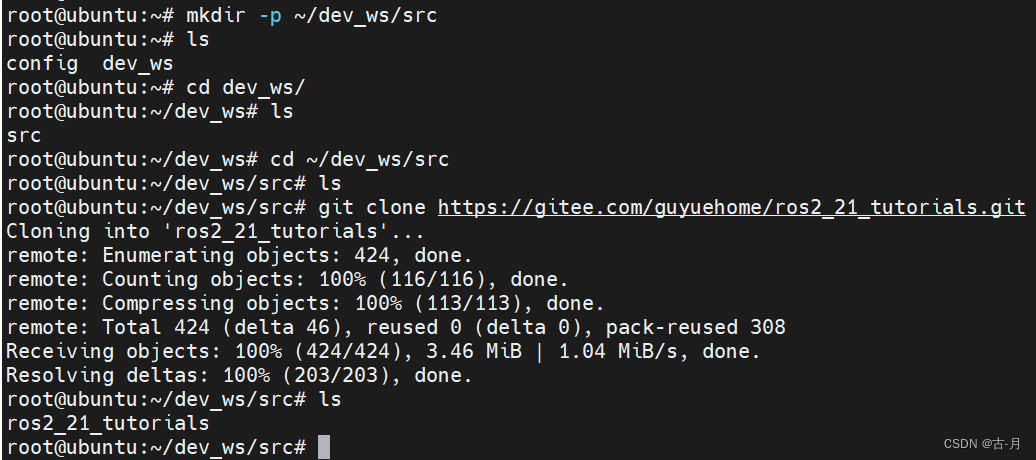
点击通过开发板来学习ROS2 21讲(基础环境配置) - 古月居 可查看全文















 1935
1935

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









