










简述:
MAVLink(Micro Air Vehicle Link,微型空中飞行器链路通讯协议)是无人飞行器与地面站之间通讯,以及无人飞行器之间通讯最常用的协议。它已经在PX4、APM、PIXHAWK和Parrot AR.Drone飞控平台上进行了大量测试。
QGroundControl可作为无人机地面站。
对于QGC3.1.3以后的版本,其编译所需的Qt版本已全面升级为Qt 5.7.1,
本文将介绍 Ubuntu下编译 QGroundControl 3.0 源码。
系统:Ubuntu 14.04.5 64bit
QGroundControl源码:3.0
1、下载QGroundControl源码
直接下载QGroundControl的zip,解压后得到的文件夹并不是完整的。需要把缺的文件单独下载补全才可以成功编译。
StableV3.0 还要下载有MavLink v1、MavLink v2以及Drivers。
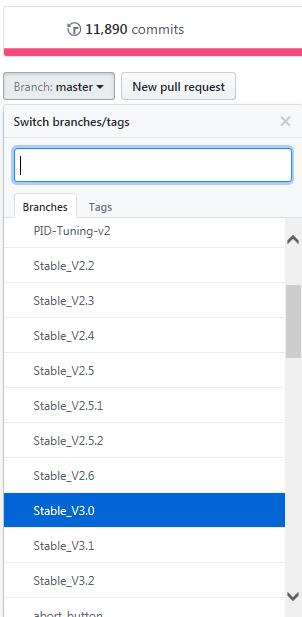
1 > 下载 QGroundControl源码,选择稳定版,3.0
-branch:分支;部门;分科
-stable:稳定的
-stable V3.0 :稳定版3.0
-tag:标记
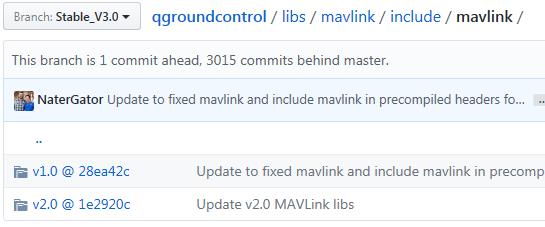
2 > 下载 MavLink V1 及V2
MavLink 是一种用于小型无人机的通信协议,于2009年首次发布。
在QGroundControl Stable V3.0项目下,点击 “libs” → 点击“mavlink/include/mavlink”
把 v1.0 和 v2.0 分别下载解压到相应的文件夹下。
注意:qgroundcontrol-Stable_V3.0.zip解压出来的文件夹qgroundcontrol-Stable_V3.0中,
qgroundcontrol-Stable_V3.0\libs\mavlink\include\mavlink 中有V1.0 和 V2.0两个文件夹,都是空的;
把上面 v1.0 和 v2.0 分别下载解压后的内容分别放到空文件夹中,不要再在v1.0/v2.0下有一个总的文件夹,否则后面生成slh文件会出错。
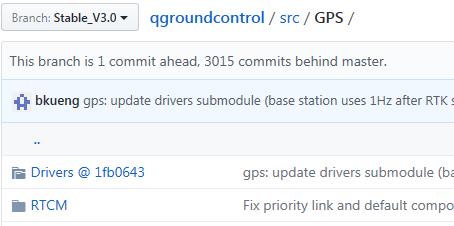
3 >下载 Drivers
同理,在QGroundControl Stable V3.0项目下,点击 “ src” → 点击“GPS”→ 点击“Drivers @ 1fb0643”
把Drivers下载解压后的内容放到相应的文件夹下:
qgroundcontrol-Stable_V3.0\src\GPS\Drivers
2、安装依赖库等
1 > 下载qt-opensource-linux-x64-5.7.0.run并按向导安装
2 > 安装git
apt-get install git
3 > 安装依赖库
sudo apt-get install espeak libespeak-dev libudev-dev libsdl1.2-dev libsdl2-dev
4 > 可能还需要在终端输入以下指令sudo usermod -a -G dialout $USER sudo apt-get remove modemmanager
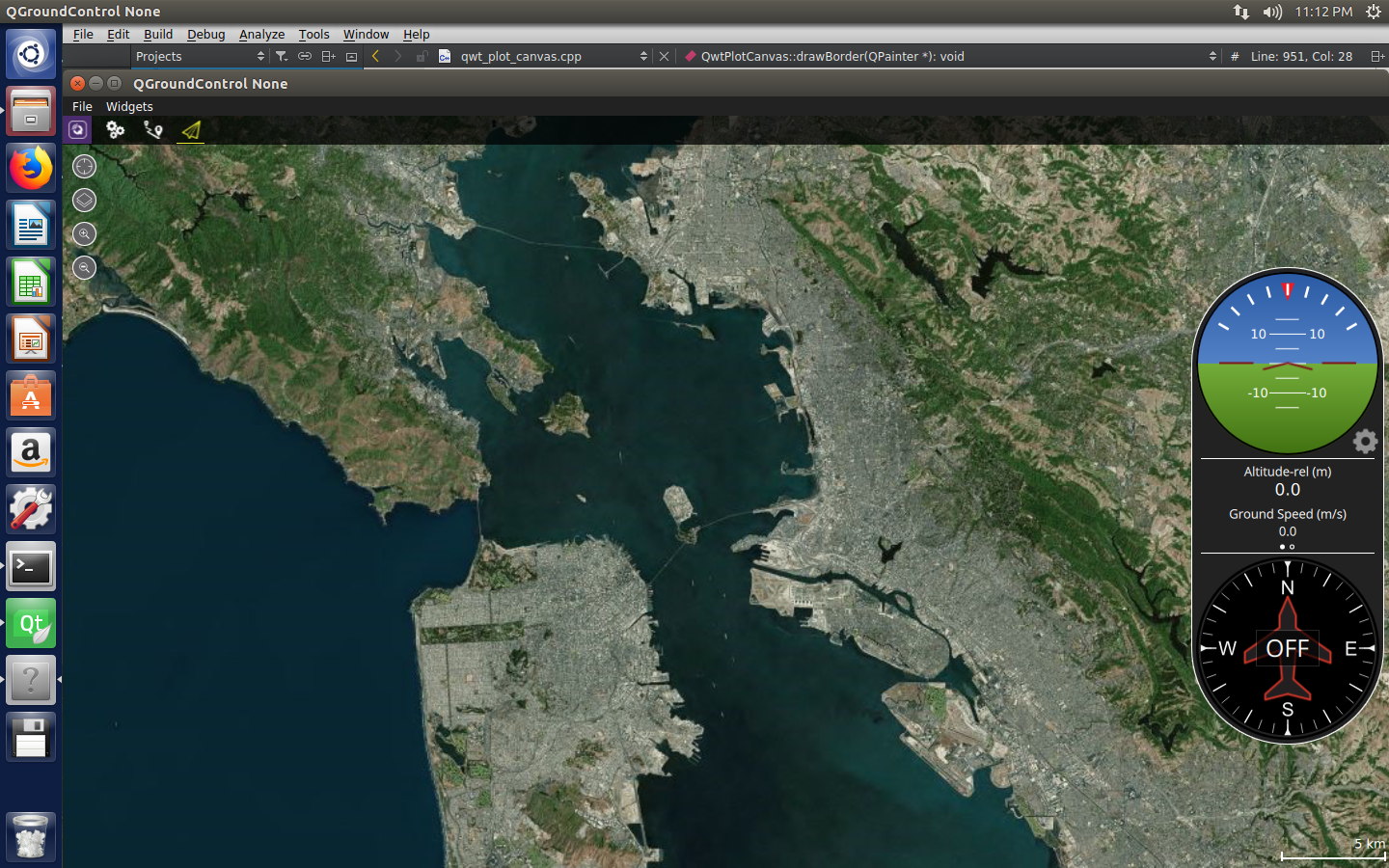
3 、Build & Run工程
用Qt软件打开qgroundcontrol-Stable_V3.0工程,“Clean” → “Run qmake”→ “Build”→ “Run”即可。
参考:















 1022
1022











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









