







前言
本代码由 Webots supervisor_draw_trail.wbt 示例 world 里的 supervisor_draw_trail.c 改写而来,并添加了对多智能体(多机器人)运动轨迹绘制的支持。
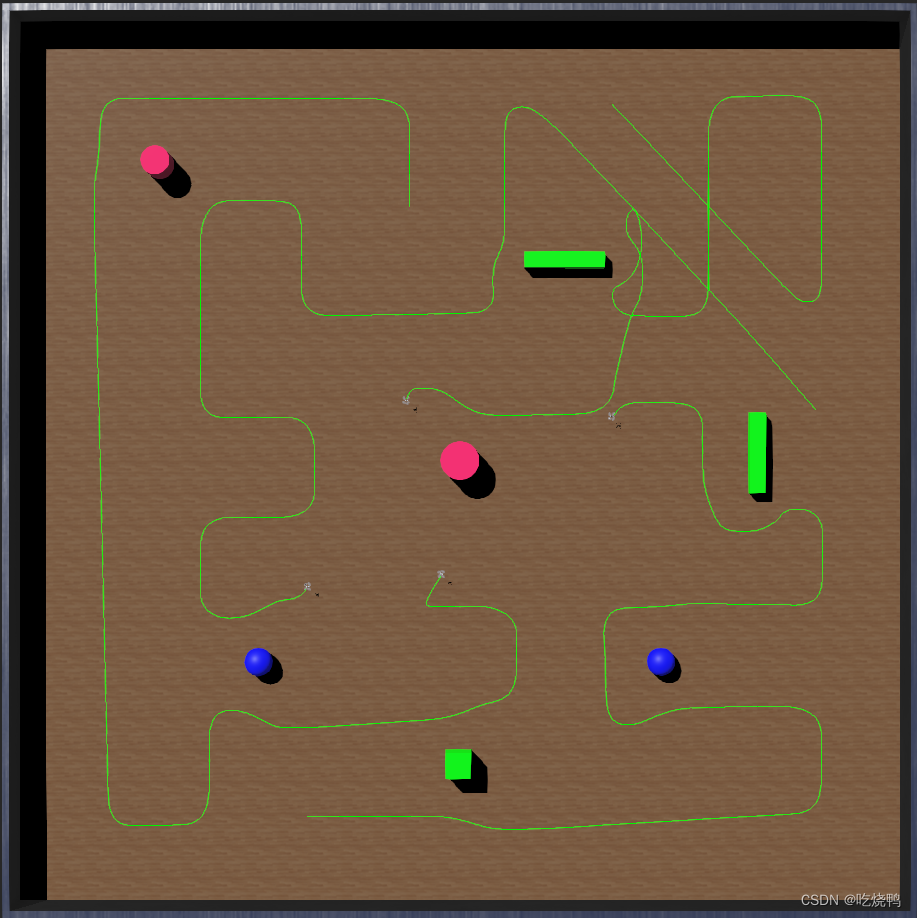
在自定义环境里的运行效果:
代码
from controller import Supervisor
class PathDrawer(Supervisor):
def __init__(self):
super().__init__()
self.MAXIMUM_NUMBER_OF_COORDINATES = 20000
self.REFRESH_FACTOR = 10
self.index = 0
self.first_step = True
# ---- 修改为你的机器人数量 ----
self.num_agents = 1
# ------------------------------
for ind in range(self.num_agents):
self.path_str = ""
self.create_trail_shape(ind)
self.get_nodes_and_fileds()
# Get the target object node to track
self.target_node = []
for ind in range(self.num_agents):
# ---- 需要在环境里将机器人 Define 别名: ROBOT0, ROBOT1, ROBOT2... -
self.target_node.append(self.getFromDef(f"ROBOT{ind}"))
# -----------------------------------------------------------------
def strcat(self, content):
self.path_str += content
def create_trail_shape(self, agent_ind):
# If TRAIL exists in the world then silently remove it.
existing_trail = self.getFromDef(f"TRAIL{agent_ind}")
if (existing_trail):
existing_trail.remove()
# Create the TRAIL Shape.
tmp_str = "{\n"
self.strcat(f"DEF TRAIL{agent_ind} Shape {tmp_str}")
self.strcat(" appearance Appearance {\n")
self.strcat(" material Material {\n")
self.strcat(" ambientIntensity 1\n")
self.strcat(" diffuseColor 0 1 0\n")
self.strcat(" emissiveColor 0 1 0\n")
self.strcat(" }\n")
self.strcat(" }\n")
self.strcat(f" geometry DEF TRAIL_LINE_SET{agent_ind} IndexedLineSet {tmp_str}")
self.strcat(" coord Coordinate {\n")
self.strcat(" point [\n")
for _ in range(self.MAXIMUM_NUMBER_OF_COORDINATES):
self.strcat(" 0 0 0\n")
self.strcat(" ]\n")
self.strcat(" }\n")
self.strcat(" coordIndex [\n")
for _ in range(self.MAXIMUM_NUMBER_OF_COORDINATES):
self.strcat(" 0 0 -1\n")
self.strcat(" ]\n")
self.strcat(" }\n")
self.strcat("}\n")
# Import TRAIL and append it as the world root nodes.
root_children_field = self.getRoot().getField("children")
root_children_field.importMFNodeFromString(-1, self.path_str)
print(f"已添加新路径节点{agent_ind}")
def get_nodes_and_fileds(self):
self.point_field_all = []
self.coord_index_field_all = []
for ind in range(self.num_agents):
self.trail_line_set_node = self.getFromDef(f"TRAIL_LINE_SET{ind}")
self.coordinates_node = self.trail_line_set_node.getField("coord").getSFNode()
self.point_field = self.coordinates_node.getField("point")
self.point_field_all.append(self.point_field)
self.coord_index_field = self.trail_line_set_node.getField("coordIndex")
self.coord_index_field_all.append(self.coord_index_field)
def update_trail(self):
for ind in range(self.num_agents):
# Get the current target translation.
target_translation = self.target_node[ind].getPosition()
print(target_translation)
# Add the new target translation in the line set.
self.point_field_all[ind].setMFVec3f(self.index, target_translation)
# Update the line set indices.
if self.index > 0:
# Link successive indices.
self.coord_index_field_all[ind].setMFInt32(3 * (self.index - 1), self.index - 1)
self.coord_index_field_all[ind].setMFInt32(3 * (self.index - 1) + 1, self.index)
elif (self.index == 0 and self.first_step == False):
# Link the first and the last indices.
self.coord_index_field_all[ind].setMFInt32(3 * (self.MAXIMUM_NUMBER_OF_COORDINATES - 1), 0)
self.coord_index_field_all[ind].setMFInt32(3 * (self.MAXIMUM_NUMBER_OF_COORDINATES - 1) + 1,
self.MAXIMUM_NUMBER_OF_COORDINATES - 1)
# Unset the next indices.
self.coord_index_field_all[ind].setMFInt32(3 * self.index, self.index)
self.coord_index_field_all[ind].setMFInt32(3 * self.index + 1, self.index)
self.index += 1
self.index = self.index % self.MAXIMUM_NUMBER_OF_COORDINATES
self.first_step = False
if __name__ == "__main__":
supervisor = PathDrawer()
while supervisor.step(32 * 10) != -1:
supervisor.update_trail()
使用方法
self.num_agents = 1修改机器人数量;- 需要在环境里将机器人 Define 别名: ROBOT0, ROBOT1, ROBOT2…,以对应代码
getFromDef(f"ROBOT{ind}"); - 一般你会在 supervisor.py 里创建一个全局的 class 继承
Supervisor,因此只需要将上面的代码融合进你的代码即可。















 3260
3260











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









