






-
- 驱动管理
-
-
- 系统功能概述
-
EV系统通过牵引电机逆变器将锂离子电池的直流电转换为交流电并用该交流电操作牵引电机以产生牵引力。VCM根据加速踏板位置、车速和档位以及从各系统接收到的扭矩限制信号等计算得出电机扭矩命令请求信号。驱动管理主要实现以下功能:
- APS/BPS同时输入时扭矩减小功能
- 充电时禁止车辆驱动功能
- 电机系统转矩/方向控制
- ECO模式
- 功率限制
- 再生制动能量回收
- 故障处理
- 紧急停止功能
-
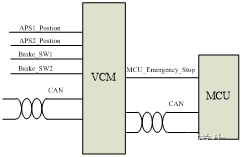
- 原理框图
-
-
-
- 信号列表
-
-
-
-
- 输入信号
-
-
| 序号 | 信号描述 | 输入/输出 | 类型 | 有效值(接通时) | 湿电流 | 备注 |
| 1 | 加速踏板位置信号1 APS1_Position | Input | 模拟信号 | |||
| 2 | 加速踏板位置信号2 APS2_Position | Input | 模拟信号 | |||
| 3 | 制动踏板信号1 Brake_SW1 | Input | 数字信号 | 高有效 | 常开 | |
| 4 | 制动踏板信号2 Brake_SW2 | Input | 数字信号 | 低有效 | 常闭 |
-
-
-
- 输出信号
-
-
| 序号 | 信号描述 | 信号类型 | 驱动能力 | 有效值(接通时) | 备注 |
| 1 | 紧急停止信号 MCU_Emergency_Stop | Output | 数字信号 | 高有效 |
-
-
-
- CAN信号
-
-
| 信号描述 | CAN ID | 位 (bit) | 类型 | 备注 |
| VCM_ShiftLeverPosition | Tx | |||
| VCM_TorqueCommand | Tx | |||
| VCM_Ready | Tx | |||
| VCM_EcoMode | Tx | |||
| MCU_Torque | Rx | |||
| MCU_MotorRPM | Rx | |||
| MCU_DCLinkVoltage | Rx | |||
| MCU_CalcDCLinkCurrent | Rx | |||
| Precharger_allow | Rx | |||
| MG_TorqueUpperLimit | Rx | |||
| MG_TorqueLowerLimit | Rx | |||
| MCU_MotorTemp | Rx | |||
| MCU_InverterTemp | Rx | |||
| MCU_status | Rx | |||
| vehicle_speed | Rx |
-
-
- MCU管理功能详述
-
-
- APS/BPS同时输入时扭矩减小功能
-
-
在IGN ON状态下,制动踏板信号需要同时校验两路信号电平是否相反,若一直保持反向电平,则判断为制动踏板有效信号标志位有效(VCM_BrakePedalParity),若两路电平信号未反向,则判断踏板故障,制动踏板有效信号标志位无效同时发送VCM_failure;
在IGN OFF状态下,通过判断制动踏板信号1信号来判断制动踏板有效信号标志位是否有效(VCM_BrakePedalParity),无需与制动踏板信号2进行校验。
VCM同时检测加速踏板APS、制动踏板BPS的输入信号。如果检测到APS,BPS输入同时有效时,制动功能优先,VCM仅响应制动请求。
-
-
-
- 充电时禁止车辆驱动功能
-
-
- 当检测充电连接信号有效时,VCM控制电机控制器扭矩输出一直为0,同时发送VCM_ready无效。
-
-
- 电机系统转矩/方向控制
-
-
行车高压上电完成后,VCM发送VCM_Ready信号给MCU,车辆进入就绪状态。
VCM根据加速踏板开度信号、制动踏板、档位信号、车速信号(或电机转速信号)、电池状态、电机状态,计算得出驾驶员请求扭矩。
VCM通过CAN信息发送当前档位状态信号与扭矩命令信号给MCU,控制电机驱动车辆。
- P档
VCM发送当前档位信号为“P档”至MCU,发送当前扭矩命令为0Nm。
- R档
VCM发送当前档位信号为“R档”至MCU,当前扭矩命令为负值时,控制电机驱动方向为反向;当前电机旋转方向为负,扭矩命令为正值时,控制电机处于能量回馈状态,将机械能转化为电能。
- N档
VCM发送当前档位信号为“N档”至MCU,当前扭矩命令值为0Nm。
- D档
VCM发送当前档位信号为“D档”至MCU,当前扭矩命令为正值时,控制电机驱动方向为正向;当前电机旋转方向为正向,扭矩命令为负值时,控制电机处于能量回馈状态,将机械能转化为电能。
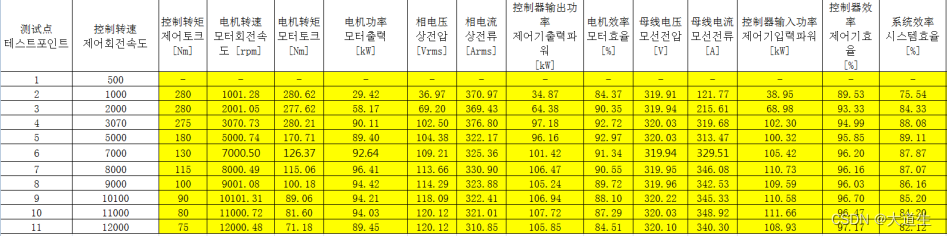
MCU扭矩控制速率需遵行以下数据:
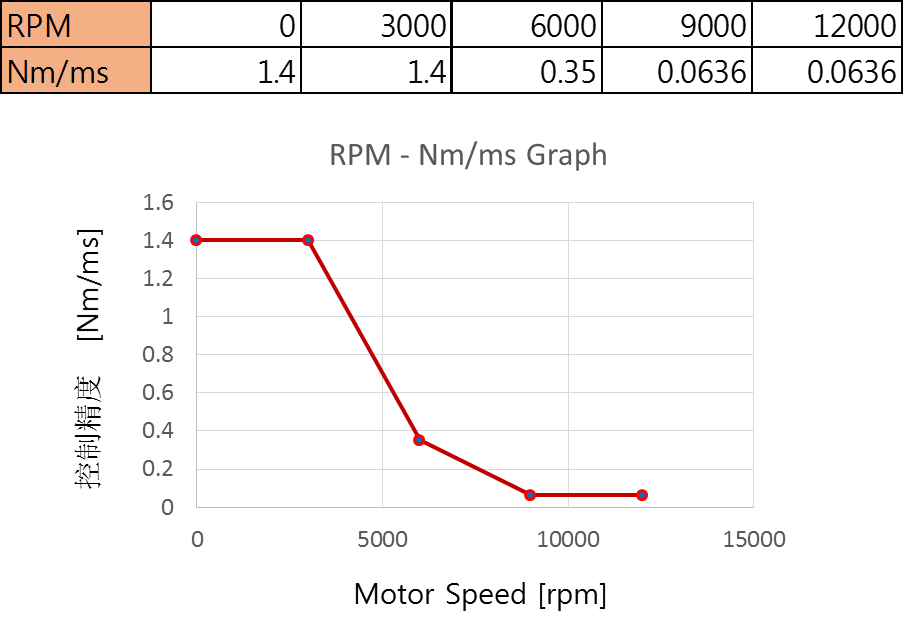
VCM发送给MCU的扭矩必须遵行MCU扭矩控制MAP曲线图,如下:
-
-
-
- ECO模式下的控制
-
-
当处于ECO模式时,VCM将发送VCM_ECOMode信号给MCU同时发送给MCU的扭矩命令变化率将减低。
当处于ECO模式时,VCM发送给MCU的最大回馈扭矩值为-100Nm;
当处于非ECO模式时,VCM发送给MCU的最大回馈扭矩值为-50Nm。
注意: ECO模式的控制策略和响应时序与D档相同。
-
-
-
- 功率限制
-
-
当接收到整车限功率故障后,VCM根据整车状态以及MCU的限制值或BMS的输出功率限制计算当前输出扭矩,同时限制车速≤60km/h(TBD).
当出现VCM自身限功率故障后(详见故障列表DTCLIST),限制扭矩输出不大于当前可输出最大值的50%(TBD),同时限制车速≤60km/h。
-
-
-
- 最高车速限制功能
-
-
VCM根据vehicle_speed判断当前是否高于整车定义的最高车速160km/h,若是则通过自动调节当前输出扭矩值的大小,限制车速不大于160km/h(±5km/h (TBD)).
-
-
-
- 再生制动能量回收
-
-
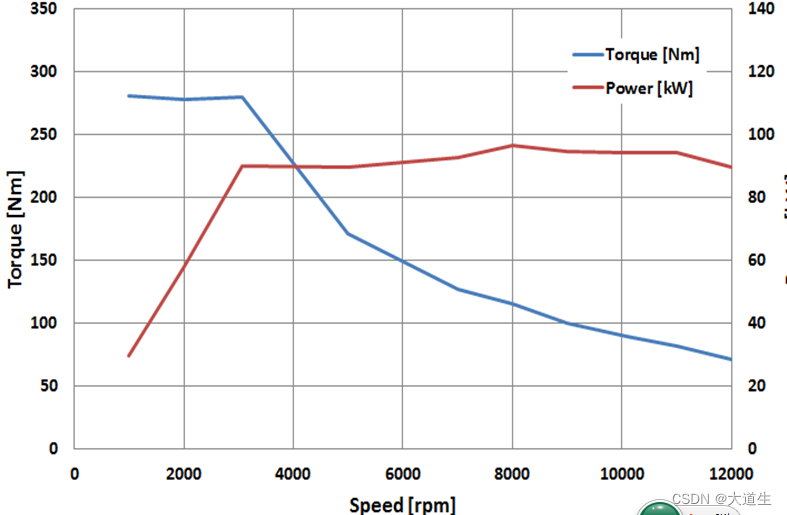
VCM根据档位,车速,电机MAP曲线图限制,结合BMS SOC等状态,计算得出最大可回收扭矩限值,通过CAN信号发送给ESP。ESP根据驾驶员需求分配能量回馈值,通过CAN发送给VCM,VCM将该扭矩值发送给MCU执行(详见ESP控制)。当BMSSOC大于95%或车速<10km/h或非D或非ECO档时,禁止能量回收,发送最大可回收扭矩为0。
-
-
-
- 故障处理
-
-
MCU故障时,VCM根据具体故障进行对应处理。详细见故障处理文档《对于 waring1,waring 2以及fault故障处理的更新.pdf》及详见本文中严重故障处理的PRA OFF流程。
-
-
-
- 紧急停止功能
-
-
- 车辆驱动过程中,VCM实时检测整车动力系统工作状态。
- 如果检测到整车系统存在严重故障,则VCM通过CAN发送驱动停止命令、通过发送硬线紧急停止信号Emergency Stop至MCU。
- MCU接收到紧急停止命令后,将扭矩降至0。VCM确认电机实际扭矩为0后,等待电机转速<174RPM,执行故障高压下电。详见本文中严重故障处理的PRA OFF流程。

















 349
349











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











