







 本文详细介绍了无人驾驶技术,包括为什么需要无人驾驶、在手机平台上实现无人驾驶的关键、无人驾驶技术架构,以及投身该行业的学习方法。文章指出,无人驾驶能显著减少碳排放、提高安全性并带来经济效益。通过一个手机平台实现无人驾驶的实验,展示了在移动SoC上运行无人驾驶系统是可能的。此外,还深入探讨了无人驾驶的定位技术,如GPS、激光雷达、视觉 odometry 和传感器融合,以及感知和决策控制的重要组件。最后,文章建议入门者具备好奇心和勇气,并提供了学习资源和书籍推荐。
本文详细介绍了无人驾驶技术,包括为什么需要无人驾驶、在手机平台上实现无人驾驶的关键、无人驾驶技术架构,以及投身该行业的学习方法。文章指出,无人驾驶能显著减少碳排放、提高安全性并带来经济效益。通过一个手机平台实现无人驾驶的实验,展示了在移动SoC上运行无人驾驶系统是可能的。此外,还深入探讨了无人驾驶的定位技术,如GPS、激光雷达、视觉 odometry 和传感器融合,以及感知和决策控制的重要组件。最后,文章建议入门者具备好奇心和勇气,并提供了学习资源和书籍推荐。
无人驾驶作为一项新兴技术,落地为产品需要大量算法、工程、产品贯通的AI全栈人才。笔者在最近一年招聘中发现,许多技术方向的同学对人工智能既爱又畏惧,一方面觉得这是未来,另一方面又觉得很难而不敢触碰。懂工程的同学做算法时有很大的畏惧感,而专注算法的同学又常常容易陷入某个算法而缺乏工程落地能力。这次笔者以一个从业者角度来与大家聊一下如何入门无人驾驶/机器人行业,也希望大家多了解PerceptIn,加入PerceptIn大家庭,在实战中成长为算法,工程,产品贯通的AI全栈人才。
为什么需要无人驾驶
首先我们探讨下无人驾驶能如何提高人类社会的效率。第一是无人驾驶对环境的影响:每辆传统车每年平均排放5吨的二氧化碳,以美国为例有2.5亿台车,每年二氧化碳排放就有12.5亿吨。而如果使用中央调度的无人新能源车,那么总排放量可以被降低到0.6亿吨,效果十分惊人。
然后我们看看无人驾驶对安全的影响:人类驾驶员每驾驶100万英里的里程,平均会发生4.2次意外,全球每年会产生大约1300万次事故。如果我们能把无人驾驶每100万英里的事故率控制在1次以内,那么总事故数会被控制在300万左右。现在每年全球车祸死亡人数超过百万,所以无人驾驶的普及可以每年在全球挽救几十万甚至上百万的生命。
最后我们了解下无人驾驶对经济的影响:由于减少碳排放,无人驾驶普及每年可减少3000亿美金的经济损失。另外,每次车祸带来的经济损失平均为3000美金,那么如果通过无人驾驶实现每100万英里的车祸率在1次以内的安全目标,每年也可以减少3000亿美金的经济损失。两者相加,无人驾驶普及后每年至少可以减少6000亿美金的经济损失,这基本相当于瑞士的GDP,如果按全球国家GDP排行榜可以排进前20左右。
在手机平台上实现无人驾驶
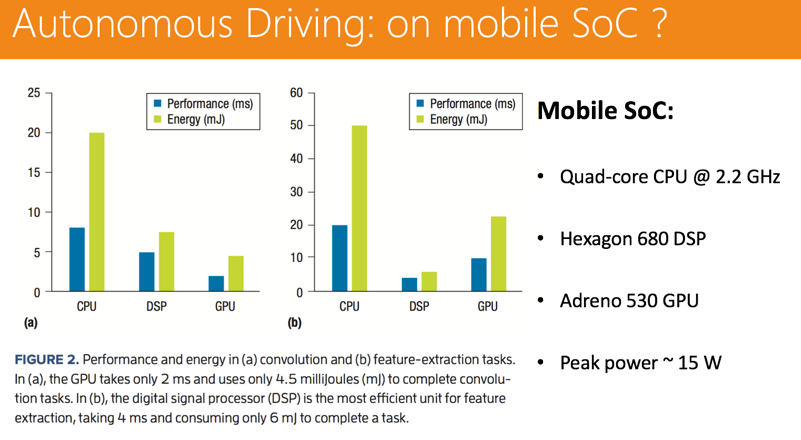
假设你是一位ANDROID手机开发者,想投身无人驾驶行业,你需要的最重要的条件不是熟悉某个技术点,而是要有足够的好奇心去探索了解新的技术与克服困难的勇气。 一年前我们探索过一个好玩的课题,如果用一个手机平台,是否可以支撑起无人驾驶的作业?于是我们使用了ANDROID手机平台,实现了一些比较简单的无人驾驶功能,主要是用视觉来做。
下图显示了一个面向基于视觉的无人驾驶的移动SoC系统组成。在这个移动SoC实现中,我们利用DSP处理传感器数据,如特征提取和光流;我们使用GPU完成深度学习任务,如目标识别;采用两个CPU线程完成定位任务以实现车辆实时定位;我们使用一个CPU线程实现实时路径规划;使用另一个CPU线程进行避障操作。如果CPU尚未被全占有,多个CPU线程则可以在同一CPU核心上运行。
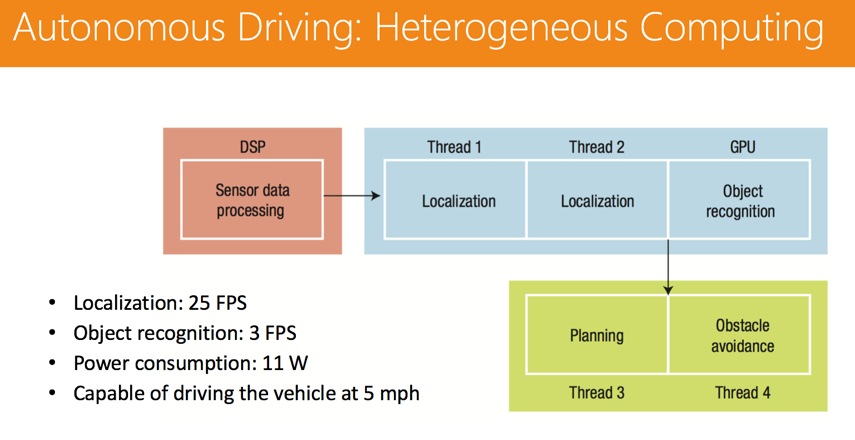
令人惊讶的是,实验数据证明,无人驾驶系统在ARM SOC上运行的性能并不差。定位流水线每秒可处理25帧图像,图像生成速度为每秒30帧图像,这说明产生的图像大部分可以得到及时处理,不会产生大规模的丢帧。深度学习流水线每秒能够执行2到3个目标识别任务。规划和控制流水线目标是在6 MS内完成路径规划。当使用ARM移动端 SOC进行无人驾驶时,我们能够以5英里/小时的速度行驶车辆,并且不损失任何定位信息;同时,整个SOC平均功耗为11瓦。移动SoC的硬件资源有限,能够支持有限范围内的无人驾驶系统确实是非常令人惊喜的发现。这说明如果增加更多的计算资源,硬件平台就能够处理更多的数据,并支持车辆以更快的速度行驶,最终满足产品级无人驾驶系统的需要。
无人驾驶技术
然后我们深入聊下无人驾驶的技术,无人驾驶并不是单点的技术,而是多个技术的整合。 无人驾驶的整体技术架构,大概可以分为三大模块:算法、系统以及云平台。
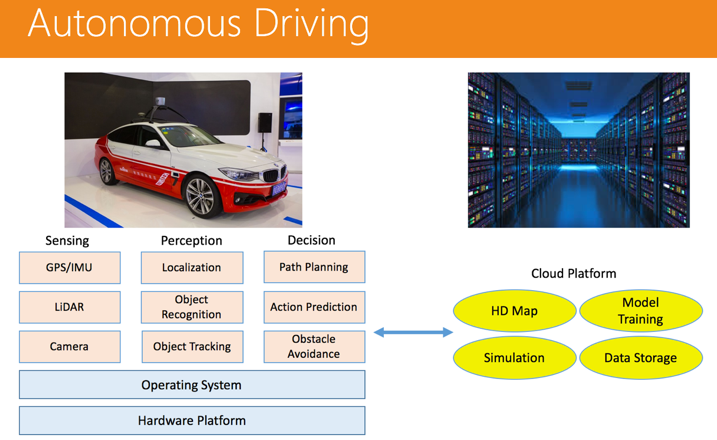
在车辆端,上层是算法模块,包括传感(如何更好的获取环境数据)、感知(如何更好的理解车辆周围环境,包括定位,物体识别,物体追踪)以及决策(在了解环境后如何更好的做出决策,包括路径规划,行为预测和障碍物躲避等)三个部分;下层则是操作系统和硬件平台。而在云端,则有一个无人驾驶的云平台,其上囊括了高精地图、模型训练、模拟计算以及数据存储等几块内容。
定位(Localization)
无人驾驶汽车行驶过程中最重要的是要知道自身处在什么位置上,只有这样才知道要怎么去往目的地。接下来将主要阐述目前应用比较多的定位技术。
- 定位技术:GPS
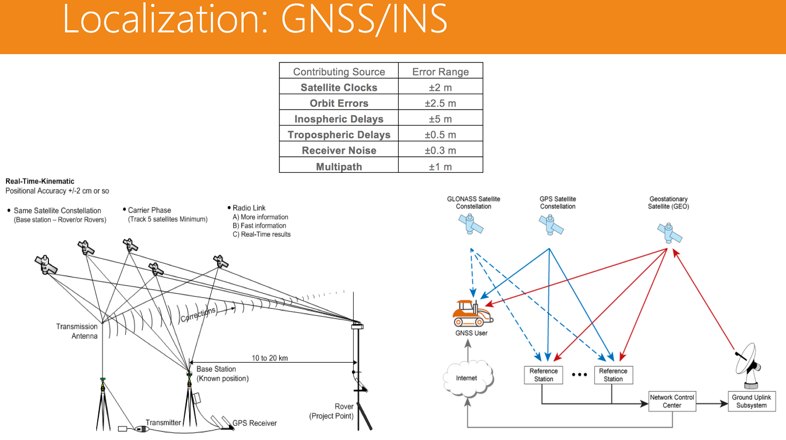
我们平常用的是多星GPS,可以接收伽利略或北斗的信号,做一个综合,然后得出一个相对精准的位置。但是多星GPS的定位精度大约能做到1-2米,这满足不了无人驾驶车道级定位的要求。所以,后续,业内又开发出一种被称为RTK(Real-Time-Kinematic)的GPS,主要是依靠在地面布置基站,通过基站的信号去纠正卫星的信号,精度可以达到分米级别甚至更低。但缺点是需要布置基站,成本很高,还需要人维护。接下来,又出现一种称为PPP(精密单点定位)的GPS技术,基于
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









