







 K-ROSET是川崎提供的离线机器人模拟软件,让用户能在虚拟环境中创建和测试多机器人自动化工作单元。该工具包含真实机器人控制系统的功能,提供3维模型交互、碰撞检测、周期时间分析等实用工具,确保模拟效果准确。用户可输出3维工作单元的视频,用于设计评审和演示。
K-ROSET是川崎提供的离线机器人模拟软件,让用户能在虚拟环境中创建和测试多机器人自动化工作单元。该工具包含真实机器人控制系统的功能,提供3维模型交互、碰撞检测、周期时间分析等实用工具,确保模拟效果准确。用户可输出3维工作单元的视频,用于设计评审和演示。
1. 机器人模拟软件 - K-ROSET
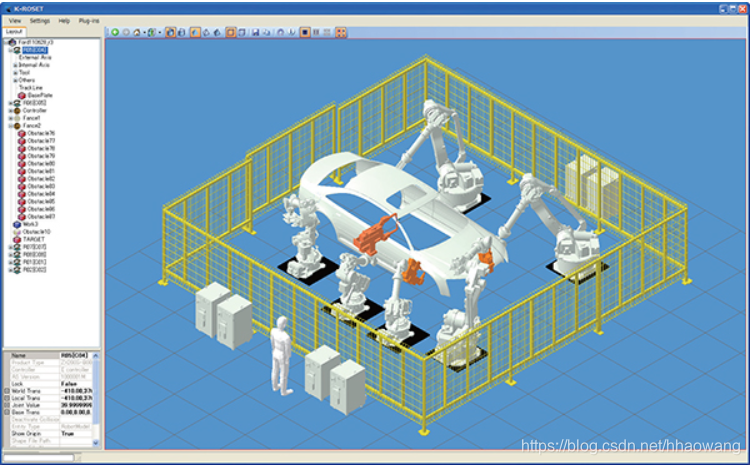
K-ROSET是川崎的离线机器人模拟软件。该工具允许用户添加川崎机器人、外围设备、机器人工具及工件的3维模型到一个虚拟环境中并建立多机器人自动化工作单元。该软件模拟了真实川崎机器人控制柜的过程,并允许用户通过示教器屏幕和按钮布局与3维机器人模型交互。用户可以舒服地通过一台笔记本电脑屏幕建立一个工作单元的完整3维示意图,编写特定应用的机器人代码,然后运行该机器人的代码,同时观看机器人的运动和逻辑。
K-ROSET有几个内置的工具,极大限度地实现模拟的效果,如碰撞检测、周期时间分析和安装位置分析。碰撞检测功能提醒用户在程序运行过程中对象是否发生了碰撞。当虚拟机器人控制柜处理模拟时,轨迹和周期时间分析工具产生高度准确的结果。用户可以输出3维虚拟工作单元的视频文件,用于设计评审和销售演示。
链接:https://robotics.kawasaki.com.cn/cn1/products/other/simulation-OLP/
2. 功能介绍
K-Roset, the Kawasaki simulation tool, is a powerful PC-Program, containing the functions of the Kawasaki Robot Families to create real time simulations.
K-Roset implements the kinematic models and software structure of Kawasaki Robot control system, to provide an accurate simulation of the robot.
K-Roset is providing practical relevant results, which correspond to real requirements.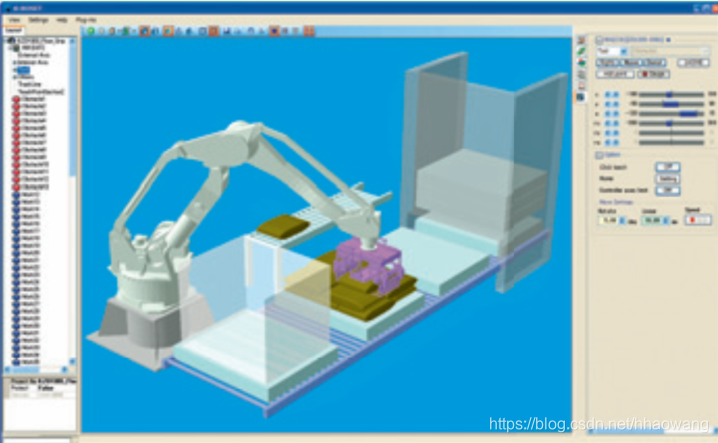


















 1231
1231

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











