







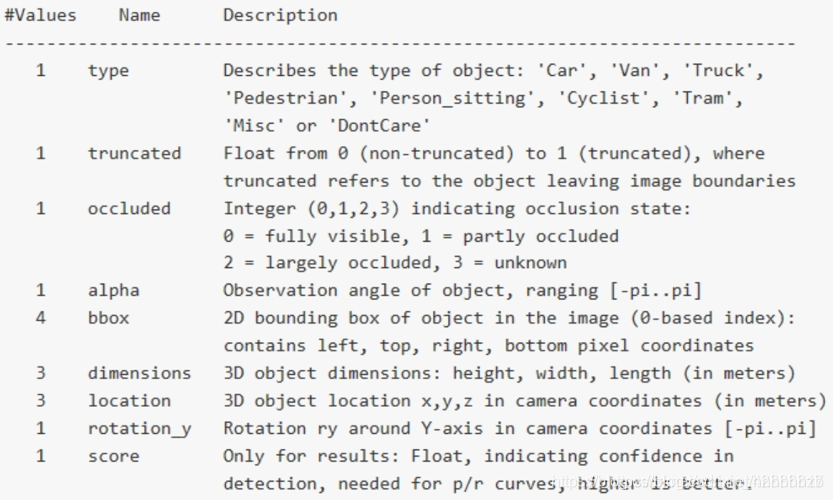
其中第1列truck 表示图中出现了卡车(一共有’Car’, ‘Van’, ‘Truck’,‘Pedestrian’, ‘Person_sitting’, ‘Cyclist’, ‘Tram’,‘Misc’ or 'DontCare’这些类别,Don’t care 是没有3D标注的,原因是雷达扫不了那么远,即使可以视觉检测出来)
第2列0.0表示其是否被截断的程度为0。(如果车在图片边缘,那么就有可能发生部分被截断的情况。用0-1 表示被截断的程度。)
第3列0表示没有被遮挡。(0表示完全可见,1表示部分遮挡,2表示大部分被遮挡,3表示未知。)
第4列 -1.57 表示卡车中心与相机中心构成的矢量与在bird view下的夹角为-1.57,实际上就是说明改开叉在-90,即正前方。这个信息反映目标物体中心在bird view相对方向信息。
第5-8列的599.41 156.40 629.75 189.25是目标的2D bounding box 像素位置,形式为xyxy,前两个值为bounding box左上点的x,y位置,后两个点为右下角的x,y位置。
第9-11列 2.85 2.63 12.34 表示该车的高度,宽度,和长度,单位为米。(H,W,L)
第12-14列 0.47 1.49 69.44 表示该车的3D中心在相机坐标下的xyz坐标。
第15列 -1.56 表示车体朝向,绕相机坐标系y轴的弧度值。注意和第4列区别开来,第四列不在乎车体朝向,而是车体中心与相机中心所构成矢量在与相机坐标系z轴的夹角(其实这里笔者有点疑虑,如果车体中心位置已知,车体朝向是不知道的,但是第4列的alpha是可以算出来的,那么其实第4列的数据是冗余的?)
第十六列,检测的置信度

















12-19
 3072
3072
3072
11-14
3027
3027
05-07
2442
2442
11-22
1710
1710
12-22
3507
3507

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









