







视频讲解
第1季:第7章_SLAM中的数学基础
-
先 导 课
-
第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
-
第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
-
第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
-
答 疑 课
------(永 久 免 费 ● 系 列 课 程 ● 长 期 更 新)------

添加图片注释,不超过 140 字(可选)
本书内容安排

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
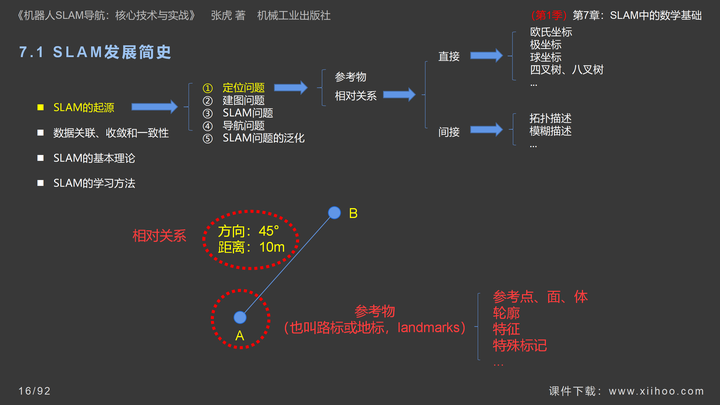
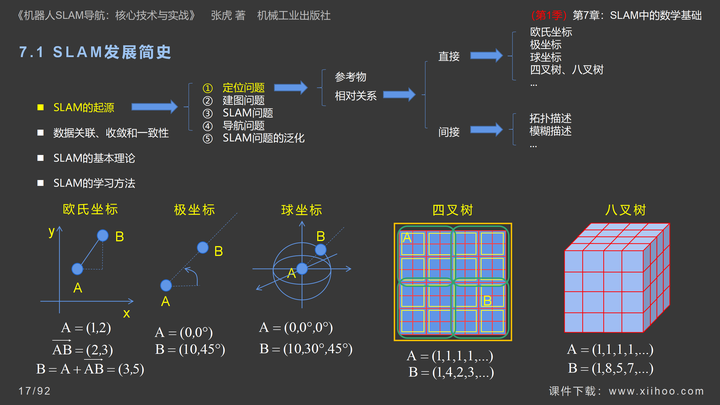
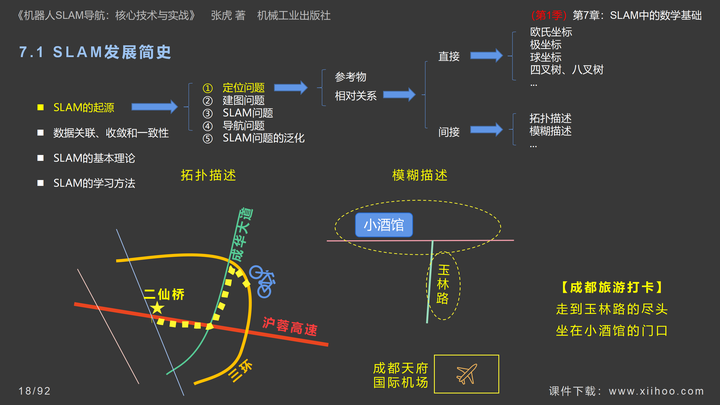
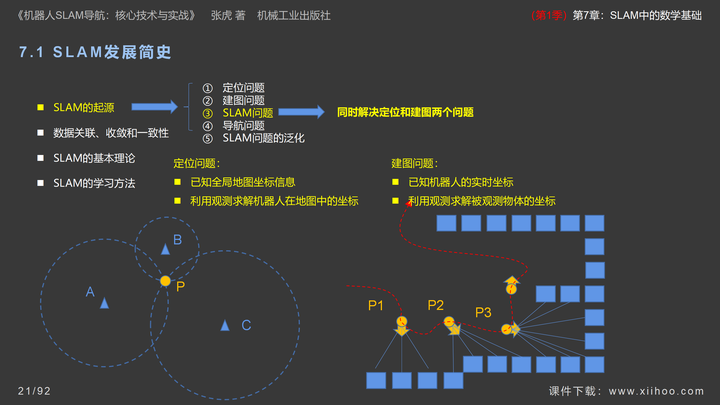
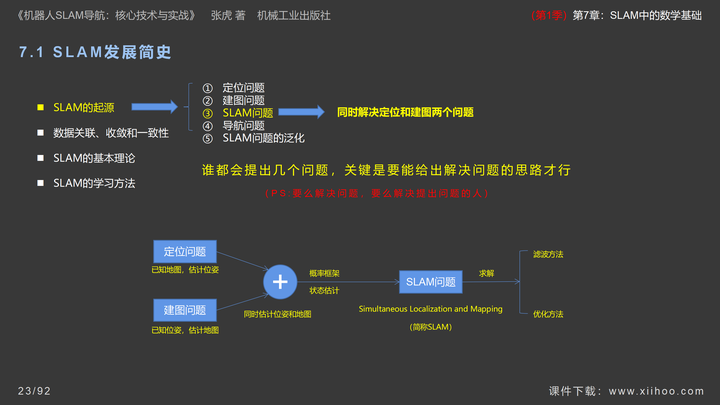
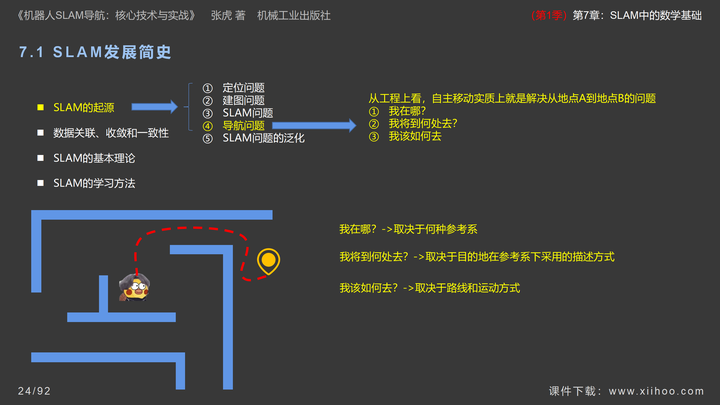
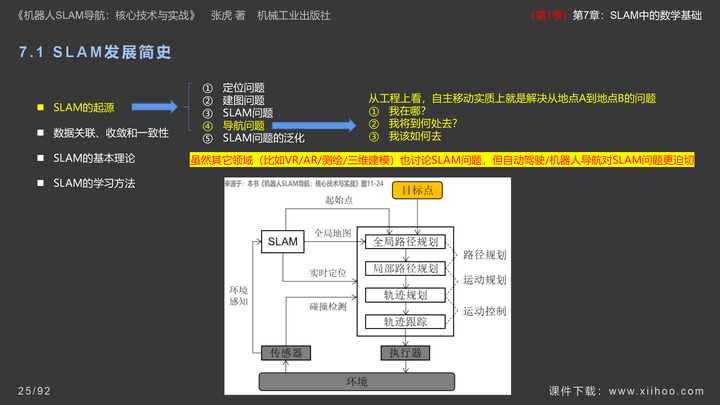
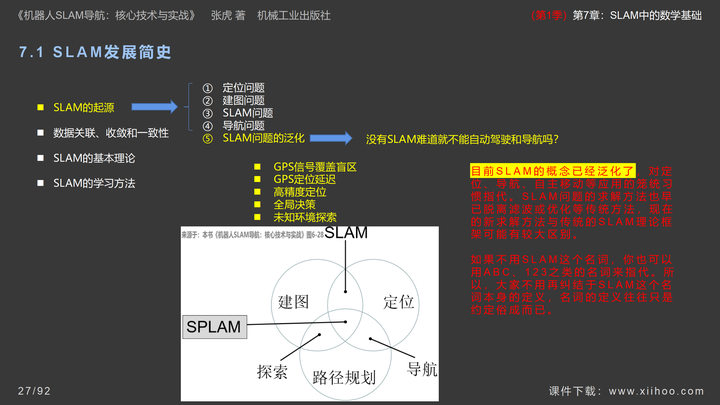
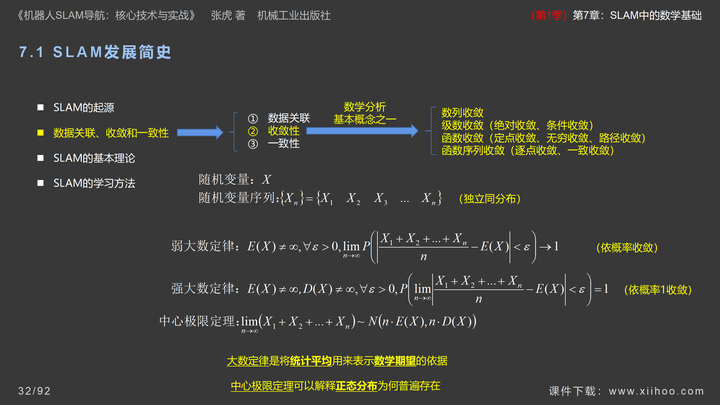
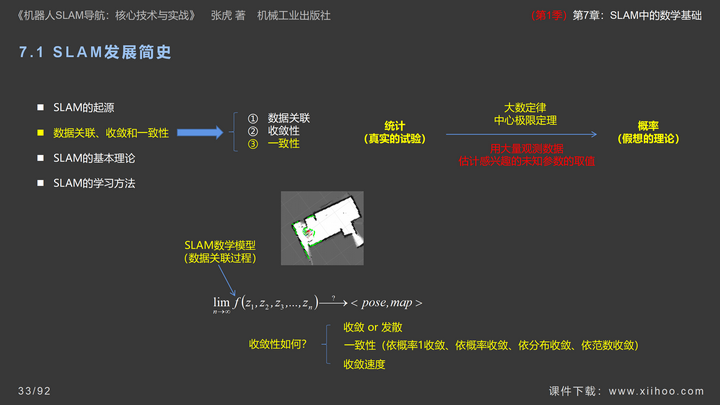
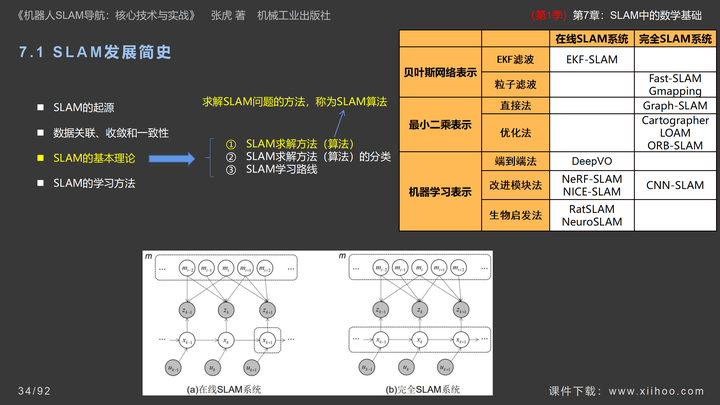
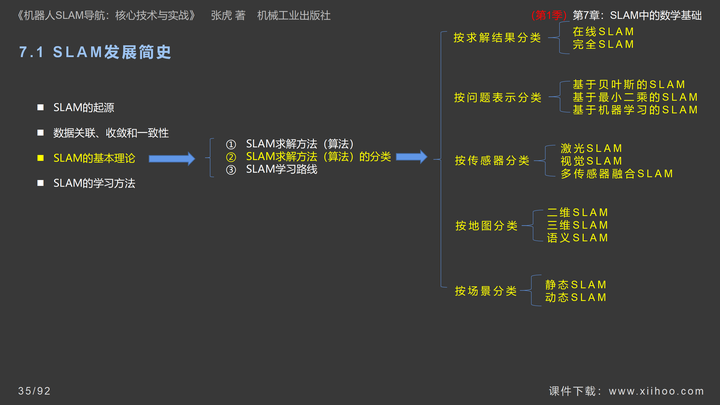
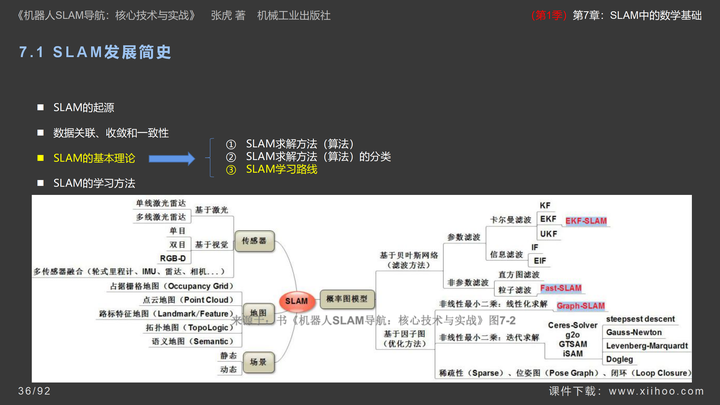
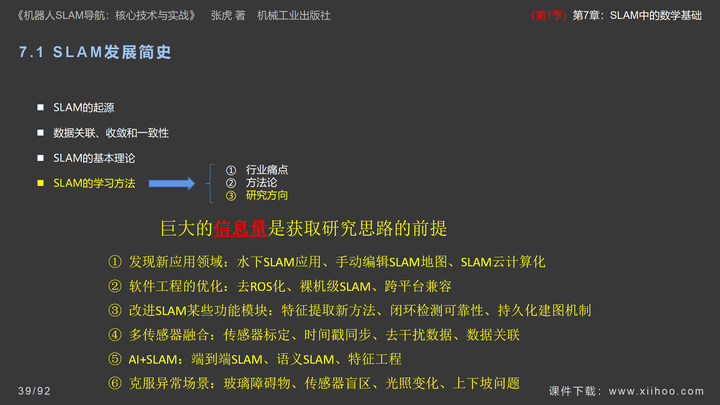
7.1 SLAM发展简史
①SLAM的起源
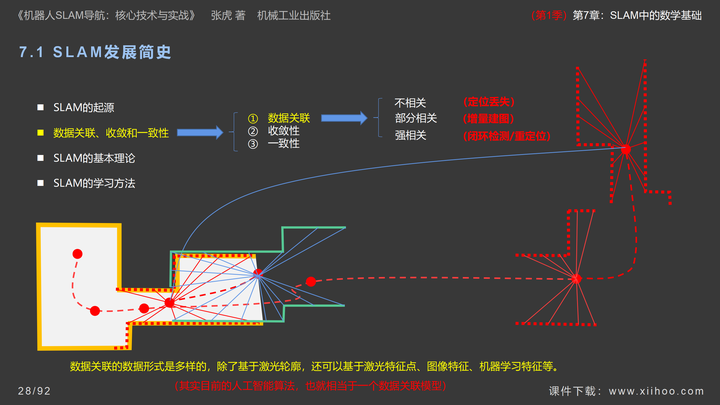
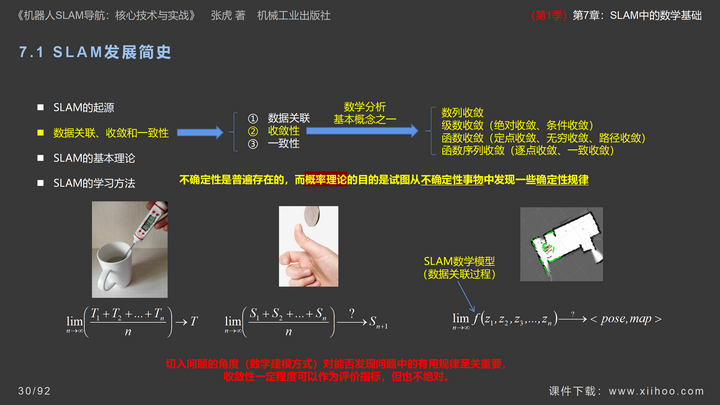
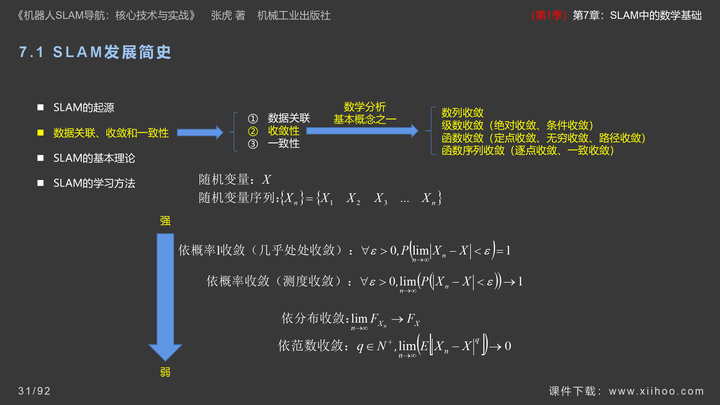
②数据关联、收敛和一致性
③SLAM的基本理论
④SLAM的学习方法

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
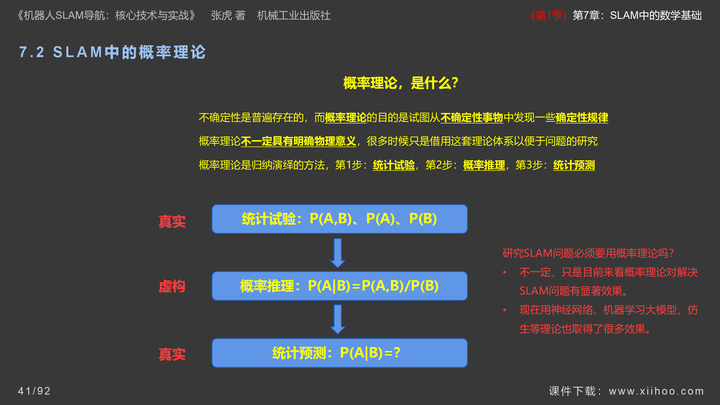
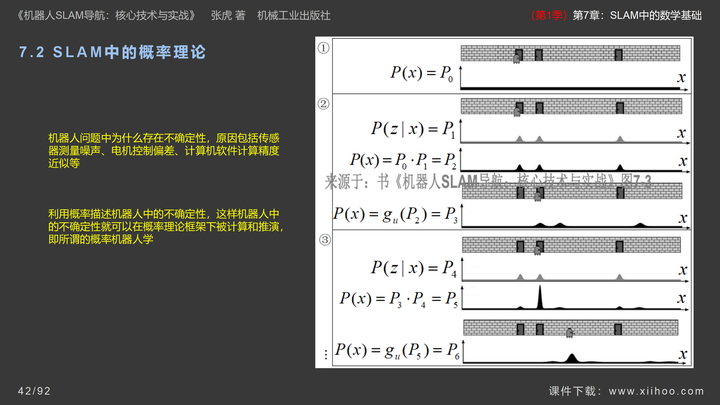
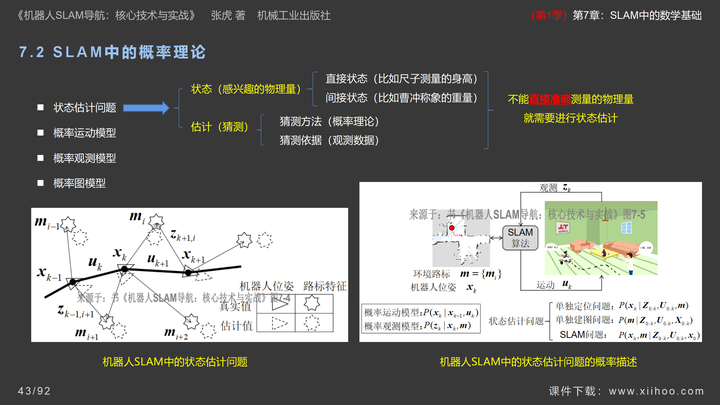
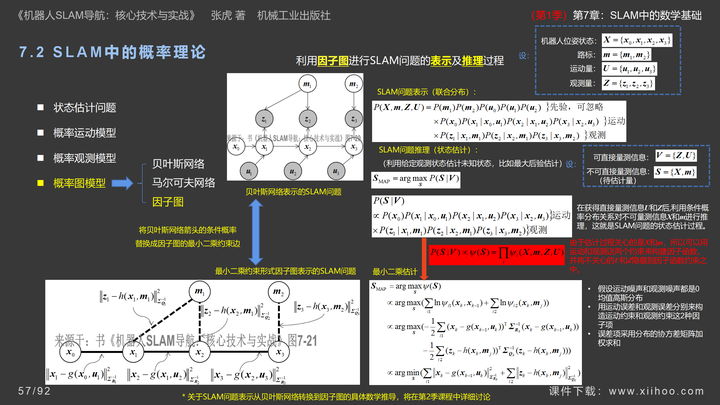
7.2 SLAM中的概率理论
①状态估计问题
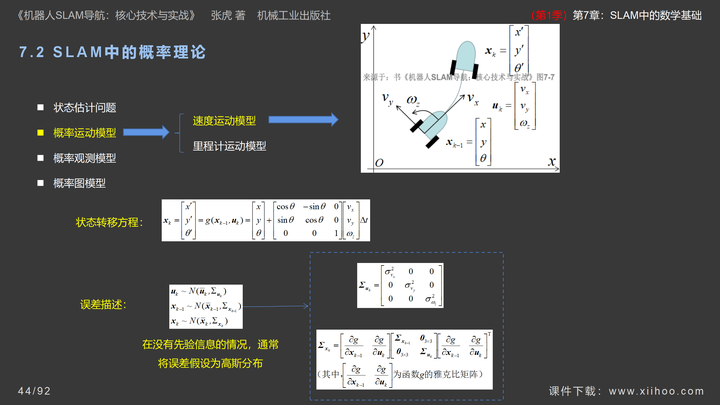
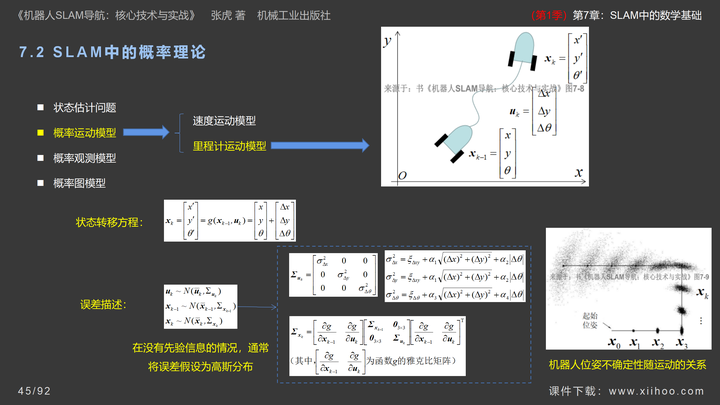
②概率运动模型
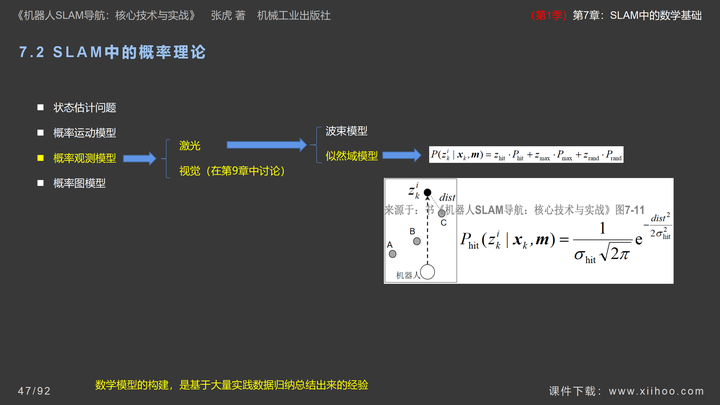
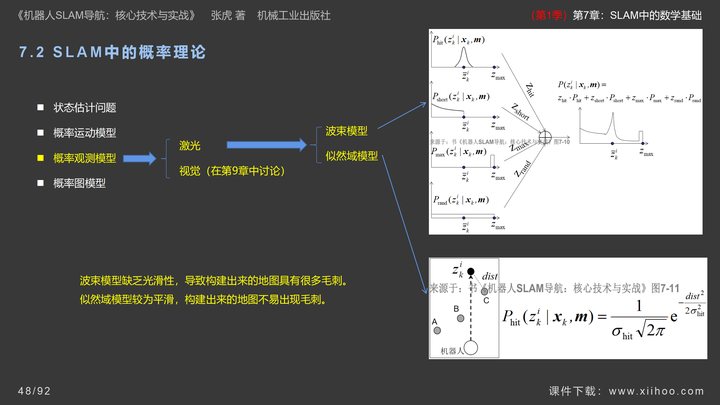
③概率观测模型
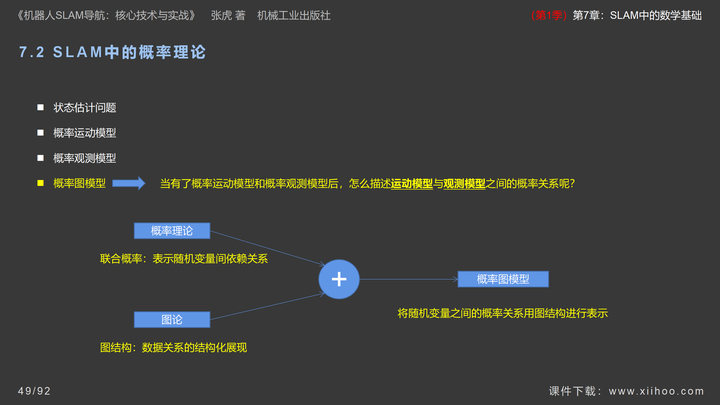
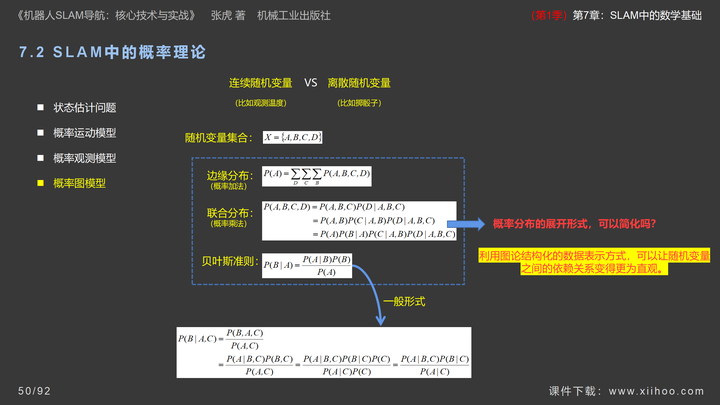
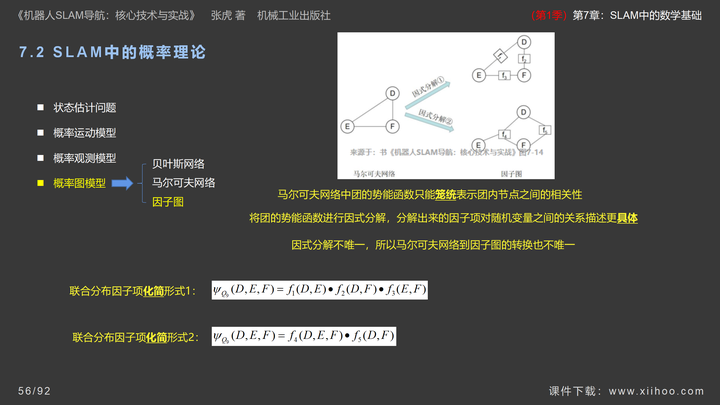
④概率图模型
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
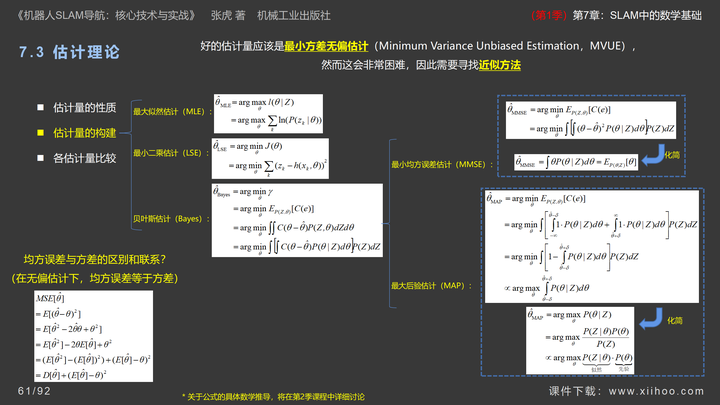
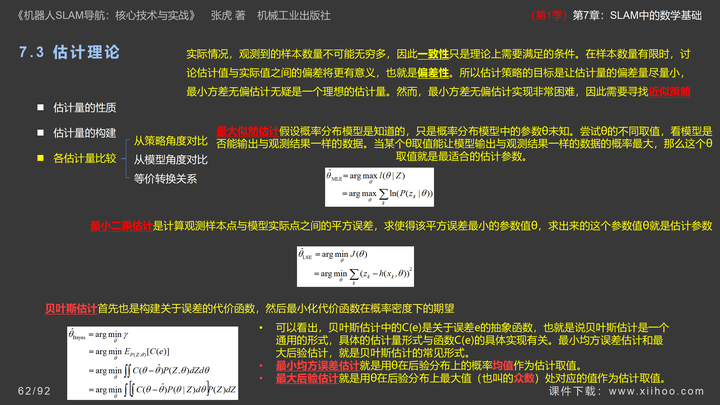
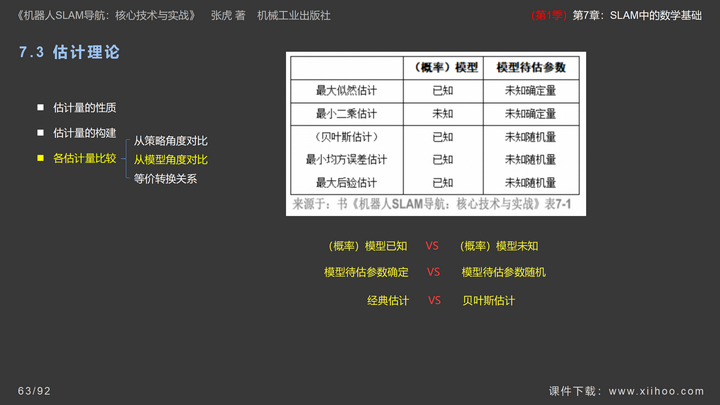
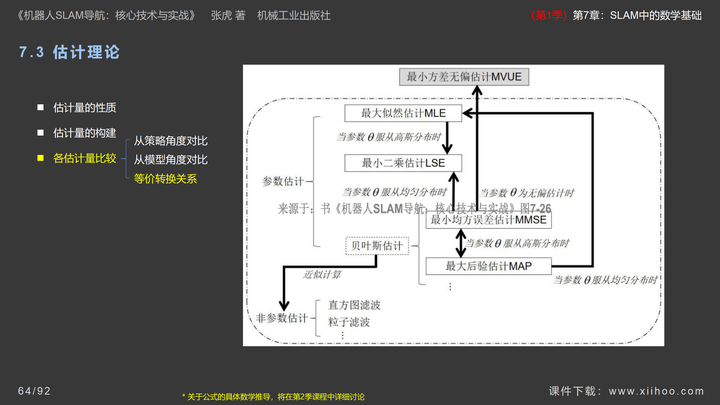
7.3 估计理论
①估计量的性质
②估计量的构建
③各估计量比较
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
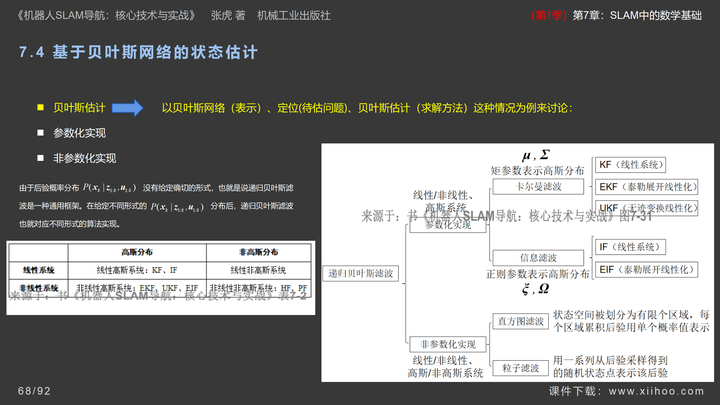
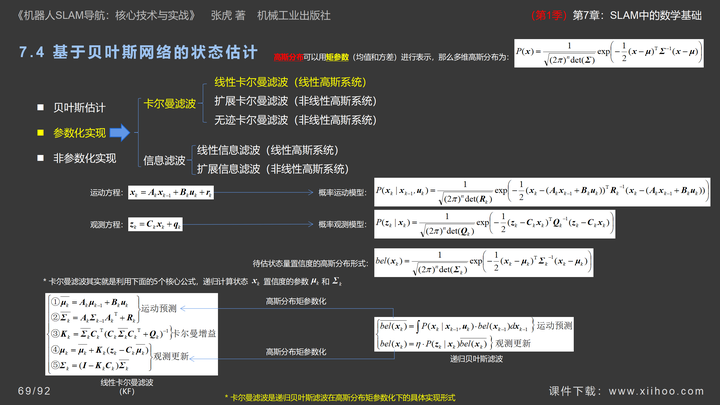
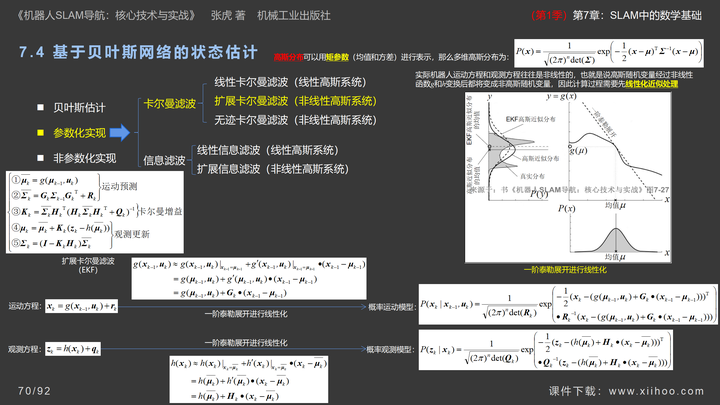
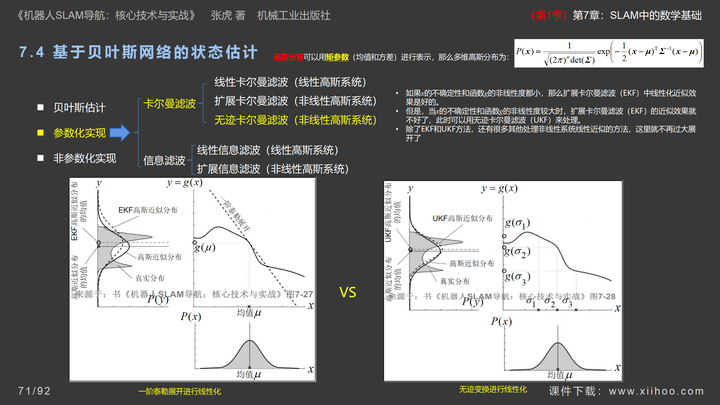
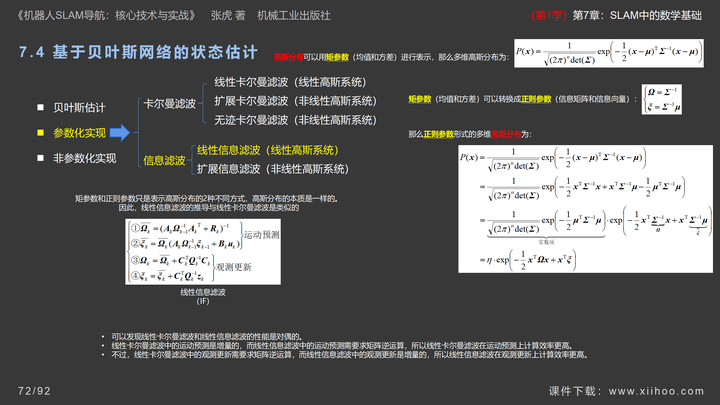
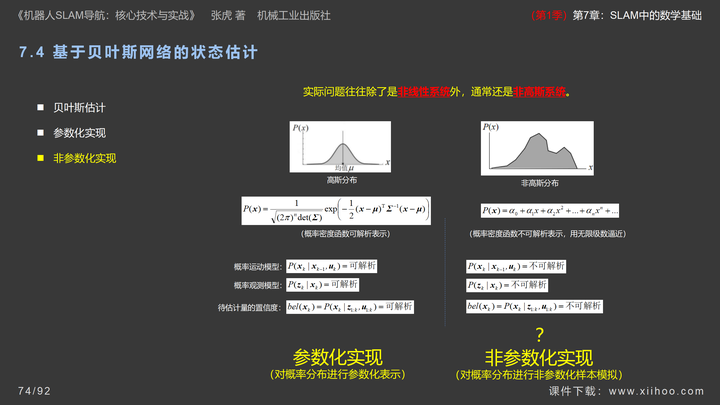
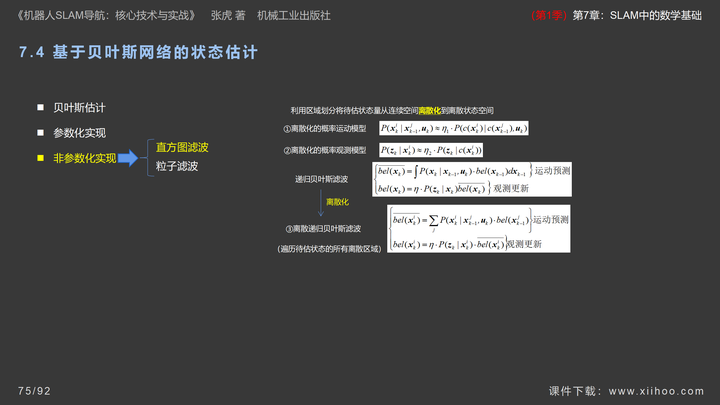
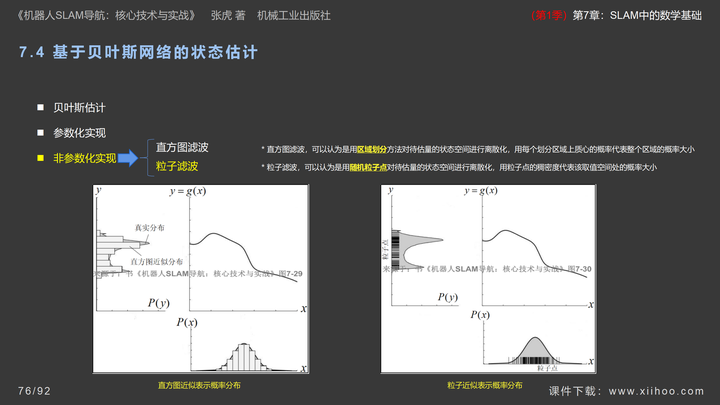
7.4 基于贝叶斯网络的状态估计
①贝叶斯估计
②参数化实现
③非参数化实现

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
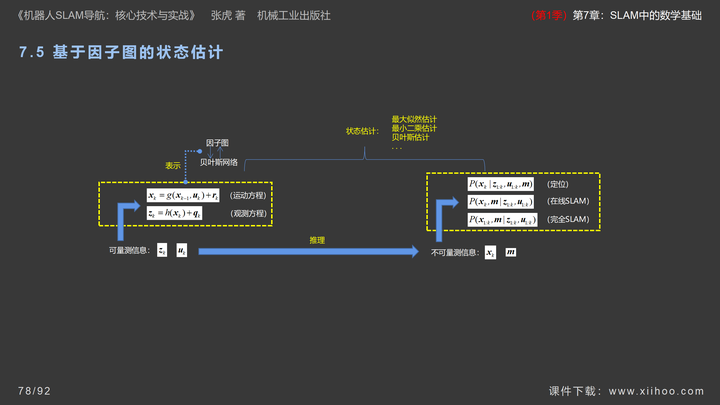
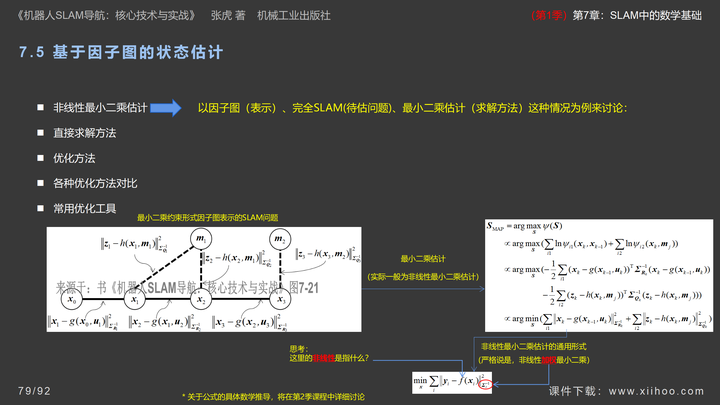
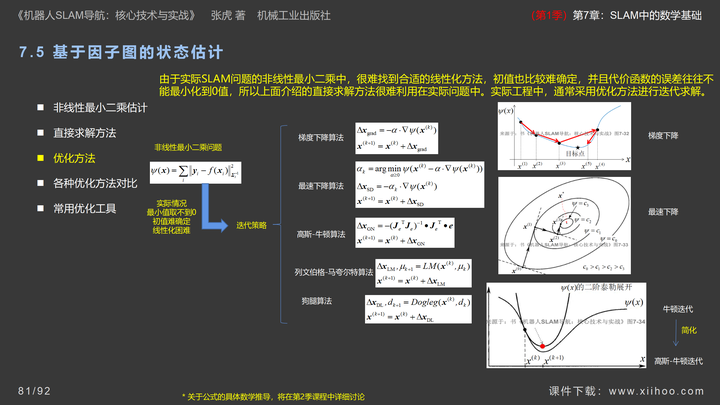
7.5 基于因子图的状态估计
①非线性最小二乘估计
②直接求解方法
③优化方法
④各种优化方法对比
⑤常用优化工具
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
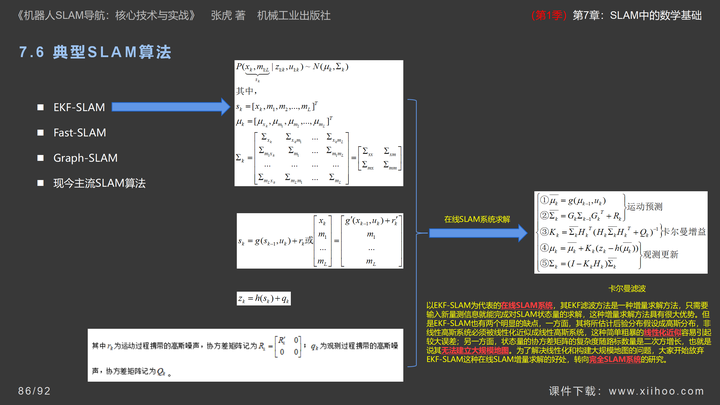
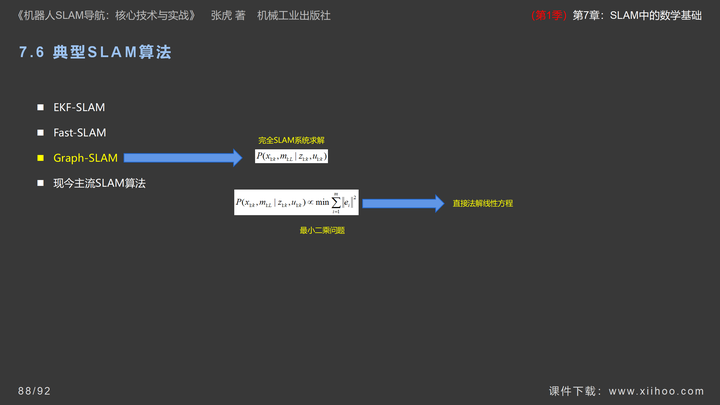
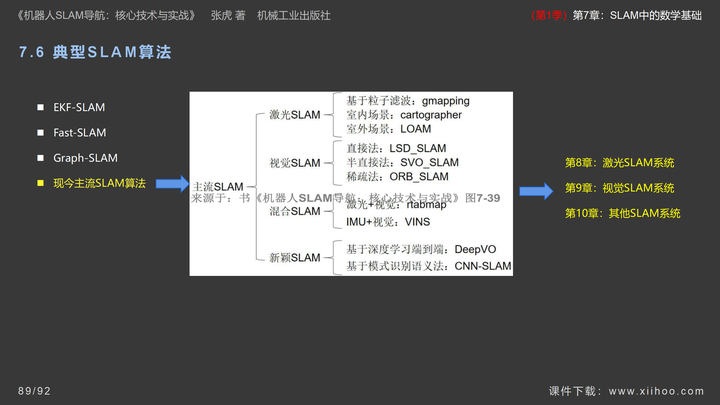
7.6 典型SLAM算法
①EKF-SLAM
②Fast-SLAM
③Graph-SLAM
④现今主流SLAM算法

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
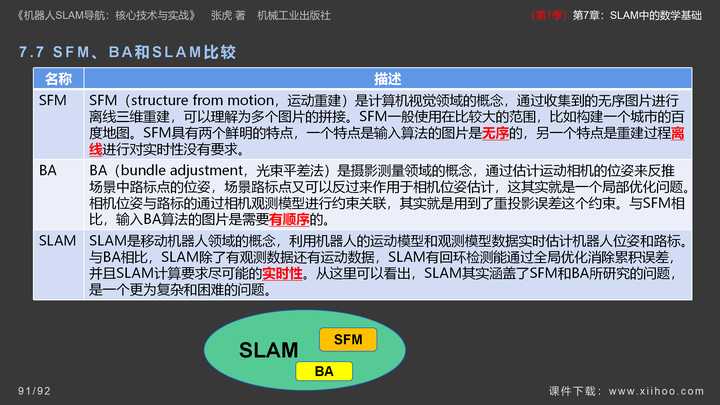
7.7 SFM、BA和SLAM比较
添加图片注释,不超过 140 字(可选)
例程源码下载
-
Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
课件下载
PPT课件下载:
PDF课件下载:














 1035
1035











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









