







ref:https://baike.baidu.com/item/%E5%8D%AF%E9%85%89%E5%9C%88/3033623?fr=aladdin
卯酉圈(Prime Vertical)就是指地平坐标系中的大圆。即与子午圈相垂直的地平经圈 ,它与地平圈相交于东点和西点。
过椭球面上一点的法线,可作无限个法截面,其中一个与该点子午面相垂直的法截面同椭球面相截形成的闭合的圈称为卯酉圈。在下图1中,PEE′即为过点P的卯酉圈 [1] 。
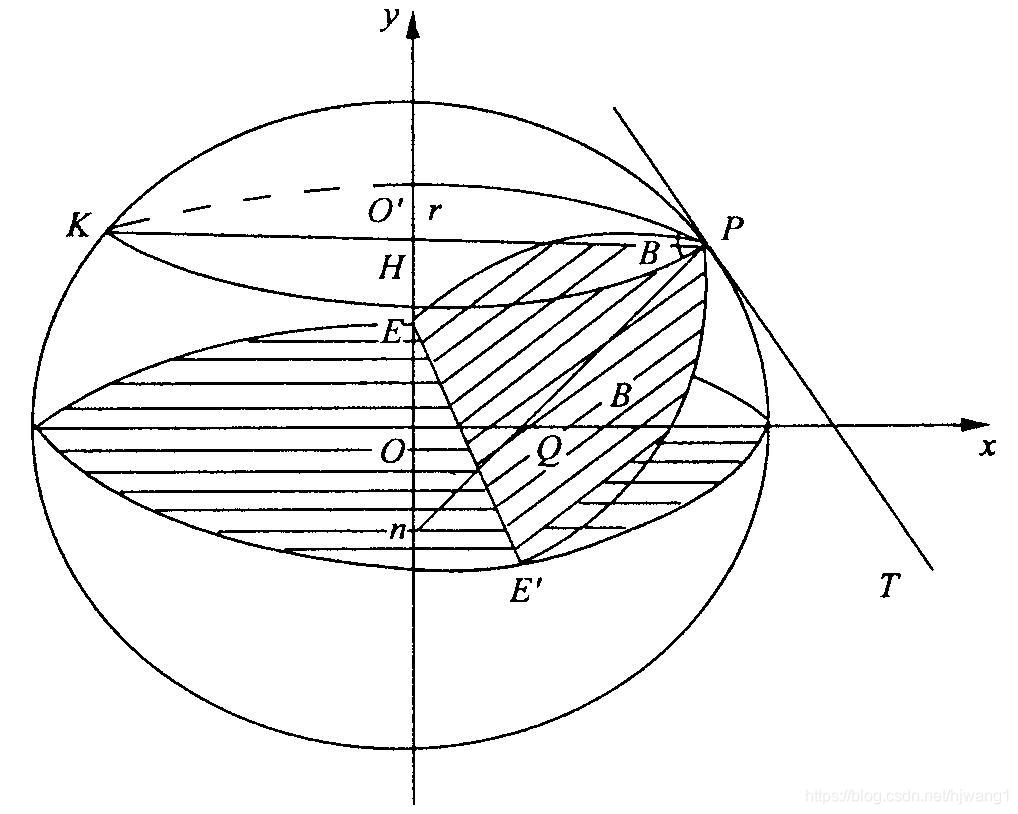
图1卯酉圈示意图
卯酉圈是一个非常拗口的名称,该名称的由来可参考下图2所示的罗盘简化图。卯酉其实就是东西向的意思。卯酉圈就是经过法线、东西走向的平面与椭球面的交线形成的闭合圈。
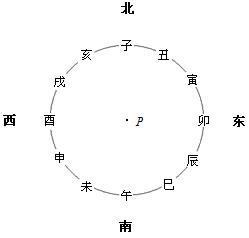
图2 罗盘简化图
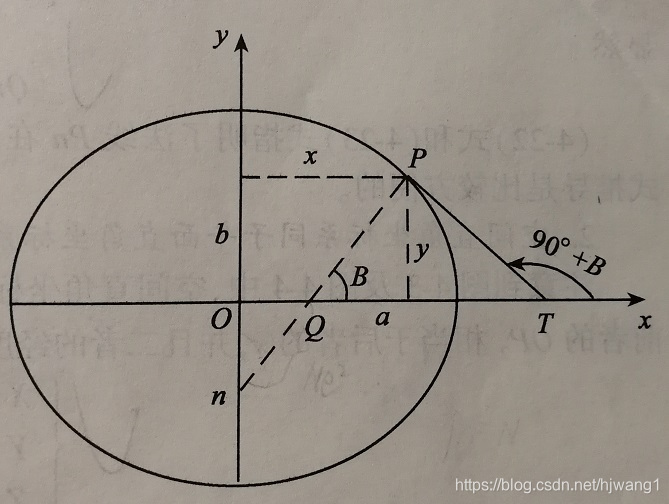
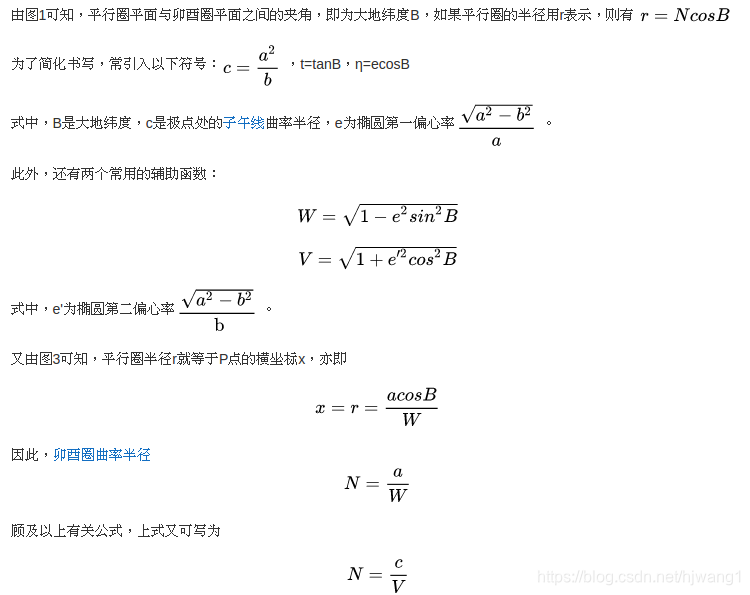
为了推求N的计算公式,如图1所示,过P点作以O'为中心的平行圈PHK的切线PT,该切线位于垂直于子午面的平行圈平面内。因卯酉圈也垂直于子午面,故PT也是卯酉圈在P点处的切线,即PT垂直于Pn。所以PT是平行圈PHK及卯酉圈PEE'在P点处的公切线。
由麦尼尔定理知,假设通过曲面上一点引两条截弧,一为法截弧,一为斜截弧,且在该点上这两条截弧具有公共切线,这时斜截弧在该点处的曲率半径等于法截弧的曲率半径乘以两截弧平面夹角的余弦。
子午圈曲率半径M=N^3*b^2/a^4


















 4575
4575

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











