







目录
1.算法仿真效果
matlab2022a仿真结果如下:

2.算法涉及理论知识概要
在数字通信中,载波同步是保证正常数据传输的重要环节之一。Costas环是一种常用的基于相位差检测的载波同步方法,适用于QPSK调制信号的同步。本文将介绍基于Costas环的QPSK载波同步方法,并比较不同环路系数对载波同步的影响。
载波同步是相干解调的基础,不管对于模拟通信还是数字通信来说,只要是相干解调,接收端都必须提供同频同相的载波。当然,若采用基带传输,此时便没有载波同步的问题,因为没有频带调制,即没有乘以载波进行频谱搬移的过程。
2.1、Costas环的原理
Costas环是一种基于相位差检测的载波同步方法。其原理是利用两个正交的本振信号对接收信号进行相位差检测,从而实现载波同步。Costas环包括两个部分:相位检测器和环路滤波器。相位检测器的作用是计算接收信号和本振信号之间的相位差。常用的相位检测器有乘法相位检测器和Foster-Seeley相位检测器等。我们使用乘法相位检测器。设接收信号为 $r(t)$,本振信号为 $c(t)$,相位差为 $\Delta\phi(t)$,则相位检测器的输出信号为:
$$
e(t)=\mathrm{Re}\left{r(t)c^*(t)\right}\cdot\Delta\phi(t)
$$
其中,$^*$ 表示复共轭。
环路滤波器的作用是对相位检测器的输出信号进行滤波,去除噪声和高频分量,从而得到稳定的载波同步信号。常用的环路滤波器有一阶低通滤波器和二阶低通滤波器等。在本文中,我们使用一阶低通滤波器。设相位检测器的输出为 $e(t)$,环路滤波器的输出为 $v(t)$,则环路滤波器的差分方程为:
$$
v(kT)=v((k-1)T)+2\pi K_pTe(kT)-2\pi K_iv((k-1)T)
$$
其中,$T$ 表示采样间隔,$K_p$ 和 $K_i$ 分别表示比例增益和积分增益,$k$ 表示采样时刻。
2.2、QPSK载波同步方法
QPSK调制是一种基于相位和幅度的数字调制方式,将两个正交载波的相位和幅度分别表示为四个符号,每个符号表示两个比特。QPSK调制信号的载波同步方法可以使用Costas环实现。QPSK信号的接收信号可以表示为:
$$
r(t)=a(t)\cos(2\pi f_ct+\phi(t))+b(t)\sin(2\pi f_ct+\phi(t))
$$
其中,$a(t)$ 和 $b(t)$ 分别表示两个正交载波的幅度,$\phi(t)$ 表示相位偏差,$f_c$ 表示载波频率。
QPSK信号的本振信号可以表示为:
$$
c(t)=\cos(2\pi f_ct)+j\sin(2\pi f_ct)
$$
其中,$j$ 表示虚数单位。
QPSK信号的相位检测器输出为:
$$
e(t)=\mathrm{Re}\left{r(t)c^*(t)\right}=\frac{1}{2}a(t)\cos\phi(t)-\frac{1}{2}b(t)\sin\phi(t)
$$
QPSK信号的环路滤波器的差分方程为:
$$
v(kT)=v((k-1)T)+2\pi K_pTe(kT)-2\pi K_iv((k-1)T)
$$
QPSK信号的载波频率可以通过相位检测器的输出进行估计,即:
$$
\hat{f}_c=\frac{K_p}{2\pi K_i}
$$
QPSK信号的相位偏差可以通过环路滤波器的输出进行修正,即:
$$
\hat{\phi}(t)=\phi(t)-\frac{v(t)}{2\pi K_p}
$$
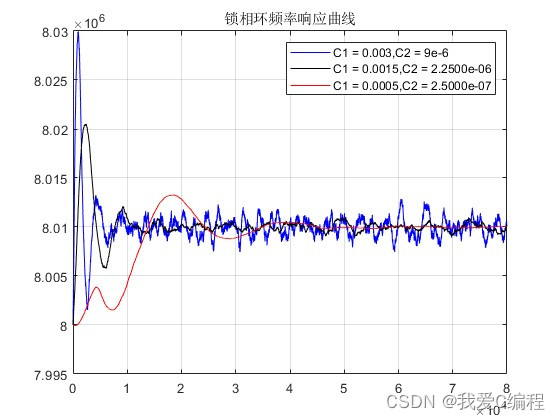
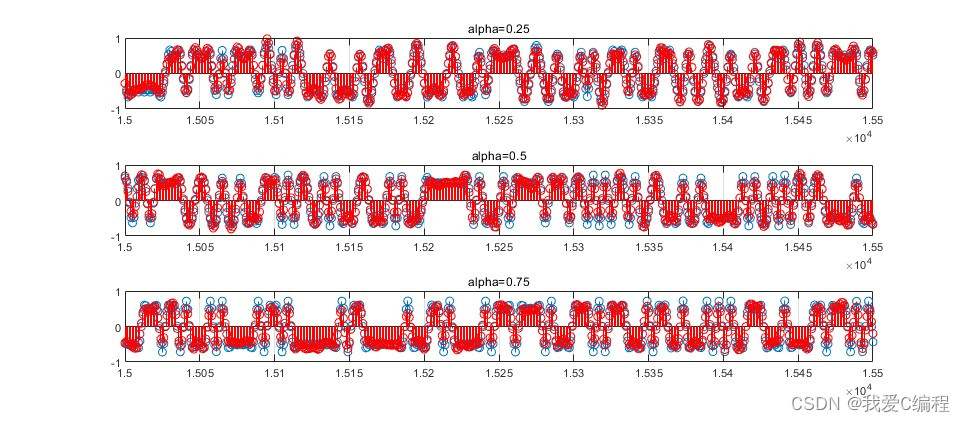
2.3、不同环路系数对载波同步的影响
在实际应用中,选择合适的环路系数对于保证载波同步的稳定性和精度非常重要。一般来说,比例增益 $K_p$ 决定了载波同步的响应速度,积分增益 $K_i$ 决定了载波同步的稳定性。在本文中,我们将分别比较不同的 $K_p$ 和 $K_i$ 值对于载波同步的影响。在实验中,我们将QPSK调制信号传输至接收端,通过基于Costas环的QPSK载波同步方法实现载波同步,并记录不同 $K_p$ 和 $K_i$ 值下的误差向量幅度和相位误差。
3.MATLAB核心程序
...........................................................................
SNRS = [2:2:16];
for SNR_DB = SNRS
SNR_DB
% SNR_DB = 4
rece = awgn(send,SNR_DB,'measured'); %接受端的信号,加载指定的snr
%rece = send;
%锁相环参数预设
Discriminator_Out=zeros(carlen * nsamp,1);
Freq_Control=zeros(carlen * nsamp,1);
PLL_Phase_Part=zeros(carlen * nsamp,1); %锁相环频率
PLL_Freq_Part=zeros(carlen * nsamp,1); %锁相环相位
WC_frame = zeros(1,carlen * nsamp);
NCO_Phase = 0;
............................................................................
end
end
%判断同步头,信号是否出现了反相,及时调整
num1 = symerr(sign(I_D(comps1:compf1)) , sign(dataoutI(comps1:compf1)));
num2 = symerr(sign(I_D(comps1:compf1)) , -sign(dataoutI(comps1:compf1)));
num3 = symerr(sign(I_D(comps1:compf1)) , sign(dataoutQ(comps1:compf1)));
num4 = symerr(sign(I_D(comps1:compf1)) , -sign(dataoutQ(comps1:compf1)));
numI = [num1,num2,num3,num4];
num = min(numI)
if num1 == num
dataout_I = dataoutI;
elseif num2 == num
dataout_I = -dataoutI;
elseif num3 == num
dataout_I = dataoutQ;
else
dataout_I = -dataoutQ;
end
num1 = symerr(sign(Q_D(comps2:compf2)) , sign(dataoutQ(comps2:compf2)));
num2 = symerr(sign(Q_D(comps2:compf2)) , -sign(dataoutQ(comps2:compf2)));
num3 = symerr(sign(Q_D(comps2:compf2)) , sign(dataoutI(comps2:compf2)));
num4 = symerr(sign(Q_D(comps2:compf2)) , -sign(dataoutI(comps2:compf2)));
numQ = [num1,num2,num3,num4];
num = min(numQ)
if num1 == num
dataout_Q = dataoutQ;
elseif num2 == num
dataout_Q = -dataoutQ;
elseif num3 == num
dataout_Q = dataoutI;
else
dataout_Q = -dataoutI;
end
%进入gardner环的信号
datarcosI = dataout_I(9:end) ;
datarcosQ = dataout_Q(9:end) ;
%统计误码率
in = dataI';
out = sign(datarcosI(1: 4:end));
[num2,rt2]= symerr(out(3001:end-5),in(3001:end));
num2
ratio(1,tp) = rt2;
in = dataQ';
out = sign(datarcosQ(1: 4:end));
[num2,rt2]= symerr(out(3001:end-5),in(3001:end));
num2
ratio(1,tp) = ratio(1,tp) + rt2;
tp = tp + 1;
end
errrate= ratio/2;
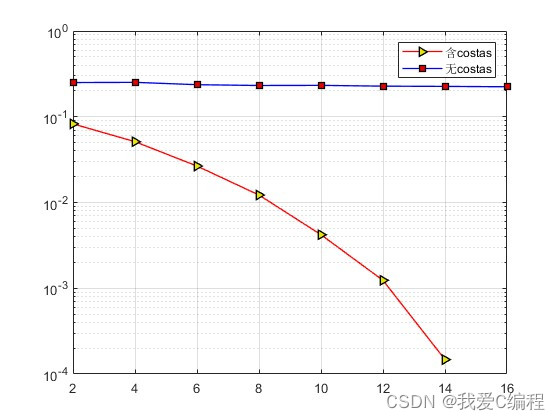
%误码率图
snr = SNRS;
figure;
semilogy(snr ,errrate,'-r>',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.9,0.9,0.0]);
grid on;
save R11.mat SNRS errrate
0X_004m4.完整算法代码文件
V
















 2627
2627











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











