






空间机械臂Matlab/Simulink仿真程序自由漂浮空间机械臂(双臂)轨迹跟踪控制matlab仿真程序,含空间机器人动力学模型,PD控制程序,带仿真结果,可供二次开发学习
ID:67200614661832646
石皮日尧123
空间机械臂是一种广泛应用于航天、卫星等领域的机器人装置,它具有高精度、高灵活性等优点,被广泛应用于各种任务的执行与完成。为了提高空间机械臂的控制精度和稳定性,研究人员提出了许多仿真程序来进行相关研究和开发。本文将围绕空间机械臂Matlab Simulink仿真程序自由漂浮空间机械臂(双臂)轨迹跟踪控制进行详细讨论。
首先,本文将介绍空间机械臂的基本概念和原理。空间机械臂是一种通过模拟人类手臂运动来实现机器人动作的装置。它由多个关节和执行器组成,可以模拟人体上肩、肘、腕等关节的运动,并且具有更高的精度和灵活性。本文将详细介绍空间机械臂的结构、工作原理以及动力学模型。
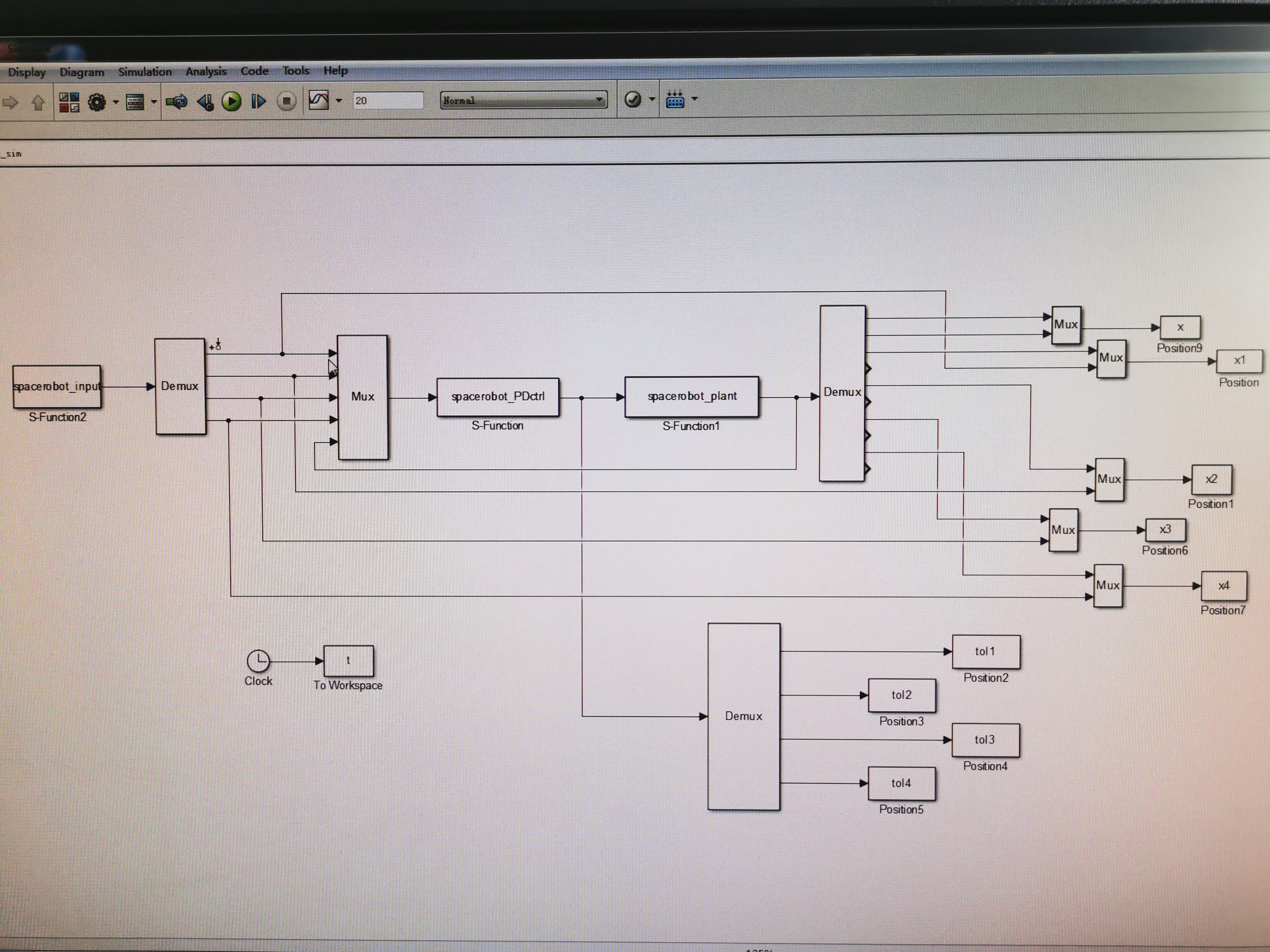
接着,本文将给出空间机械臂Matlab Simulink仿真程序的开发过程。Matlab Simulink是一种常用的仿真工具,可以对机械臂的控制算法进行建模和仿真。本文将详细介绍如何使用Matlab Simulink来建立空间机械臂的仿真模型,并且给出相应的仿真结果。同时,本文还将介绍PD控制程序的设计和实现,以实现空间机械臂的轨迹跟踪控制。通过仿真程序,可以直观地观察到机械臂的运动轨迹和控制效果。
最后,本文将探讨空间机械臂仿真程序的二次开发学习。二次开发是指在已有的仿真程序的基础上进行修改和扩展,以满足更复杂的控制需求。本文将介绍如何进行空间机械臂仿真程序的二次开发,并且给出相应的示例和说明。通过二次开发,研究人员可以更加灵活地进行相关研究和开发工作。
综上所述,本文围绕空间机械臂Matlab Simulink仿真程序自由漂浮空间机械臂(双臂)轨迹跟踪控制展开了详细的讨论。通过本文的阅读,读者可以了解空间机械臂的基本概念和原理,掌握Matlab Simulink仿真程序的开发过程,以及学习空间机械臂仿真程序的二次开发。希望本文能够对读者在空间机械臂研究和开发中起到一定的帮助和指导作用。
相关的代码,程序地址如下:http://imgcs.cn/614661832646.html
















 2939
2939











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









