







1、内容简介
略
530-可以交流、咨询、答疑
2、内容说明
:针对存在建模不确定性和随机干扰等不确定信息的机械臂轨迹跟踪控制问题,提出了一种新型非奇异固定 时间滑模控制方法。首先,利用凯恩方程和虚功原理,推导了
n 自由度机械臂的动力学方程。然后,由固定时间稳 定理论,设计了新型固定时间滑模面,结合
6R 机械臂的凯恩动力学模型,针对机械臂的模型参数不确定性和外界 干扰,设计了非奇异固定时间滑模控制器,并基于
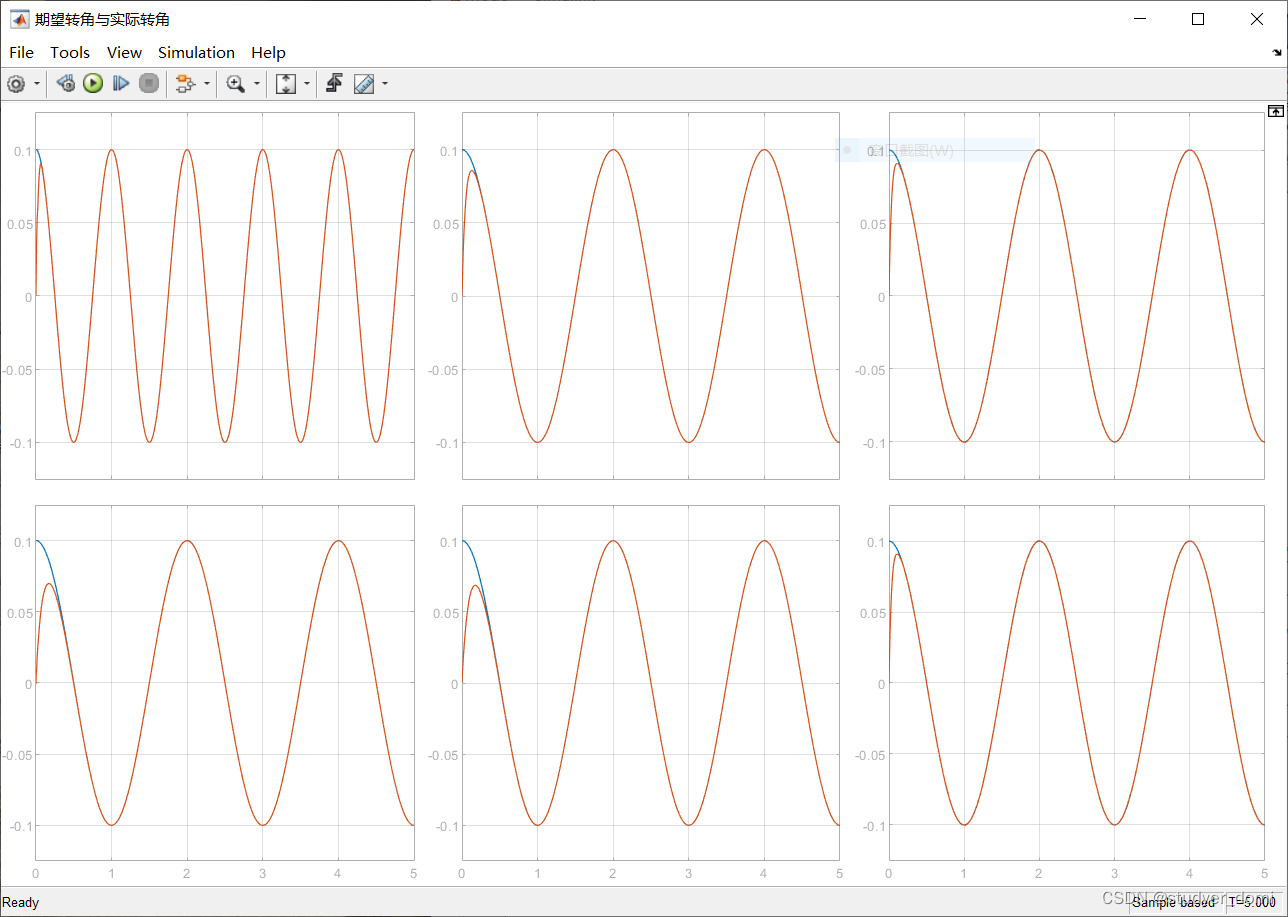
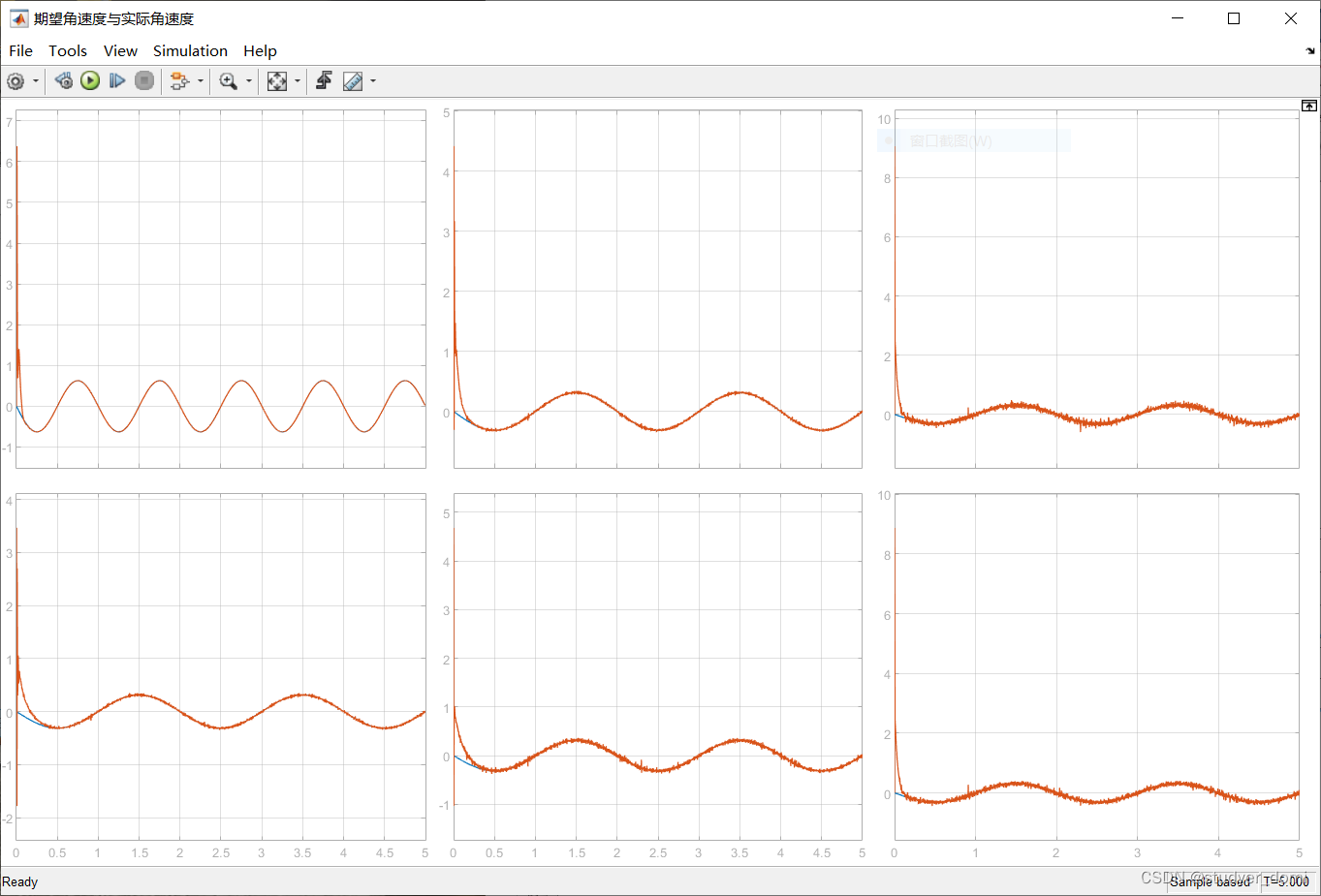
Lyapunov 理论证明了系统的稳定性。数值仿真表明,所设计的控 制器能保证系统状态的收敛不依赖于初始条件,并具有更快的收敛速率和更短的收敛时间以及良好的鲁棒性。
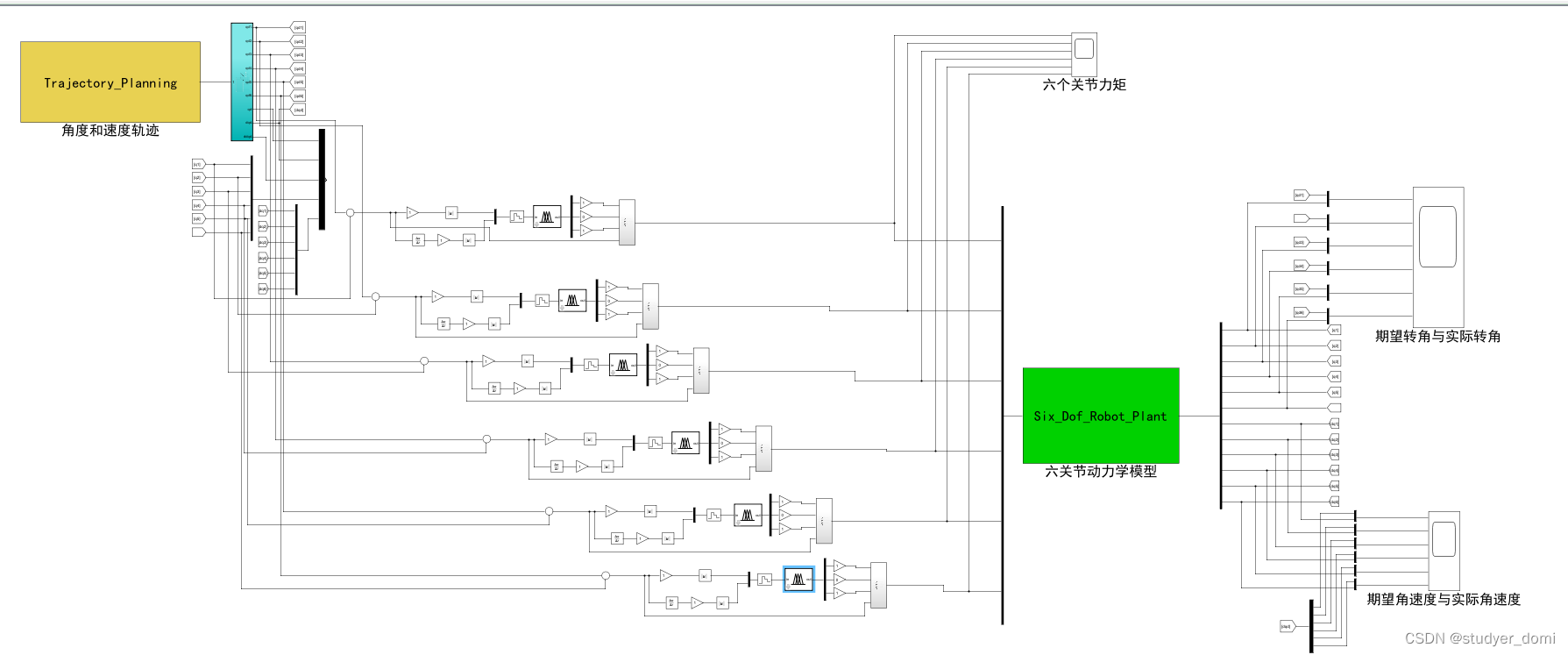
随着工业自动化的快速发展,机械臂的应用 越来越广泛[1]。机械臂作为一类多输入多输出、 非线性、强耦合的复杂系统,因此对机械臂的建 模和控制尤为重要,常见的动力学建模方法有牛 顿—欧拉法,拉格朗日法和凯恩法等[2][3]。牛顿 —欧拉法以递推的形式建模,计算简单,但是控 制律实现困难,而拉格朗日法建模过程繁琐,且 方程冗长,计算量较大[4][5]。凯恩法以广义速率 描述系统的运动过程,利用广义惯性力和广义主 动力建立系统的动力学模型,算法简洁高效,既 适用于完整系统,也适用于非完整系统[6][7]。 由于机械臂普遍存在参数摄动和外界干扰等 问题,传统控制方法难以实现机械臂的高精度轨 迹跟踪,而滑模变结构控制因为对扰动较强的鲁 棒性,在机械臂控制领域得到了广泛的应用[8]。 文献[9]结合旋量指数积推导了机械臂的凯恩动力 学方程,提出了一种快速终端滑模控制,具有较 好的收敛特性和控制精度。文献[10]将鲁棒滑模 控制和模糊控制结合,有效抑制了机械臂控制器 输出的抖振现象。但以上滑模控制方法仅能实现 机械臂的渐进稳定,文献[11]提出了有限时间滑 模控制以实现系统状态有限时间稳定,但收敛时 间受系统初始状态的影响。在此基础上,文献 [12]提出了固定时间稳定,保证系统收敛时间一 致有界,且收敛时间上界与系统初始条件无关。 本文从机械臂所受力和力矩做功的角度,推 导了 n 体机械臂的凯恩动力学模型,为实现机械臂的高精度轨迹跟踪控制,提出了一种新型非奇 异固定时间滑模控制方法。针对 6R 机械臂的凯恩动力学模型,建立了系统误差模型,设计了机 械臂的姿态控制器,提高系统抗干扰能力的同时保证系统在固定时间内收敛到平衡点,且其收敛时间与系统初始状态无关。为验证所提算法的有效性,在 MATLAB 中进行了仿真实验,并与文献[12]提出的固定时间滑模控制和文献[13]提出的自适应固定时间滑模控制进行了对比。
3、仿真分析
4、参考论文
基于凯恩方程的机械臂固定时间滑模控制
基于凯恩方法的串链多关节机器人建模

















 1119
1119

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









