







 博客介绍了AGV导航系统,支持SLAM、V槽、磁条三种导航模式,可随时切换。阐述了SLAM导航原理、精度及环境要求,如激光雷达探测距离等。还介绍了V槽导航,用于解决SLAM导航精度问题,说明了其原理、精度和环境要求。
博客介绍了AGV导航系统,支持SLAM、V槽、磁条三种导航模式,可随时切换。阐述了SLAM导航原理、精度及环境要求,如激光雷达探测距离等。还介绍了V槽导航,用于解决SLAM导航精度问题,说明了其原理、精度和环境要求。

V槽导航对接
本导航系统目前支持SLAM导航模式、V槽导航模式、磁条导航模式。
AGV工作时,可以根据场景,随时任意切换导航模式。使其导航精度和便利性达到应用要求。
注意:上述导航模式的核心区别是小车反馈位置的计算方式,在路径规划和控制的算法上相同的。
SLAM导航原理
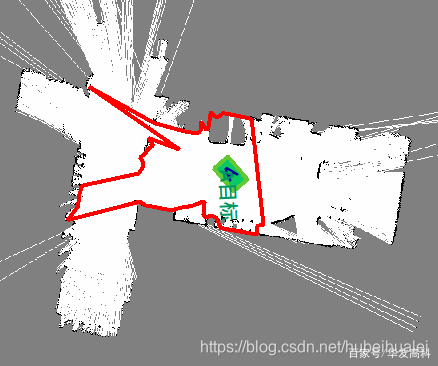
地图显示
地图:灰色是未知区域,白色是已知区域,深黑色是墙壁轮廓。
红色是激光数据轮廓。
SLAM导航精度和环境要求
1、根据AGV工作的路径,分析agv行走中,离墙壁等参照物的距离。要求激光雷达的探测距离足够远,可以探测到的轮廓的总长大于1米。还需要注意同一款激光雷达对于不同颜色的物体,其探测距离是不一样的。
如果在AGV在室外行走,建议选择室外专用雷达。
2、AGV行走过程获得的激光轮廓,相对于原始地图的理想轮廓的变化量小于40%,定位精度可以稳定在3cm范围内。
当轮廓变化量过大时,因为激光数据对于编码器里程计的修复能力会下降,会导致随着AGV行走的距离,定位精度逐渐线性损失。但是不用担心AGV位置的突然远距离的跳变。

V槽充电桩
V槽导航原理
为了解决环境轮廓变化大时,SLAM导航精度不确定的问题,我们研发了V槽导航。
该方法的基本原理是,提取AGV车前后左右一定区域的激光数据,然后分析V槽几何特征,去计算得到V槽相对于车的位置。这样无论外界环境怎么变化,只要雷达可以探测到V槽,所得到的AGV的反馈位置就是十分准确可靠的。
然后依据该位置进行轨迹控制,最终停靠定位精度可以稳定达到10mm范围内。
V槽导航精度和环境要求
导航精度:10mm范围内。
环境要求:
1)路径有限定,车运行过程必须保证雷达完整扫描到V槽。
2)车离V槽小于3米
3)现场允许放置V槽返回搜狐,查看更多

















 1143
1143

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









