







Batch Norm
x = torch.rand(5, 3, 5, 5) #batchsize=5 RGB图像
x1 = x.permute(1, 0, 2, 3).reshape(3, -1) # 对(N, H, W)计算均值方差
mean = x1.mean(dim=1).reshape(1, 3, 1, 1)
# x1.mean(dim=1)后维度为(3,)
std = x1.std(dim=1, unbiased=False).reshape(1, 3, 1, 1)
my_bn = (x - mean)/std
print((official_bn-my_bn).sum()) # 输出误差
x.permute(1,0,2,3)的作用是将 RGB中的R、G、B抽出来,然后将这些R、G、B放在一起
将

变为

对于permute这个函数,还是要结合()中每个参数的定义去理解
-
比如RGB图像
(B C H W) 其中C=3
B就是图像的个数 C就是三个H、W的灰度图片叠在一起
x.permute(1,0,2,3)就是C个图像、B个H W的灰度图像叠在一起
x.permute(0,2,3,1)就是B个图、H个W C的灰度图像叠在一起
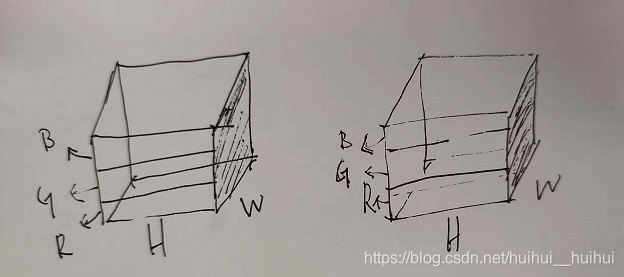
W C就是立方体中阴影的平面 -
比如体数据
(B C D H W) C通常为1
Layer Norm
x = torch.rand(5, 3, 5, 5)
x1 = x.reshape(10, -1) # 对(C,H,W)计算均值方差
mean = x1.mean(dim=1).reshape(10, 1, 1, 1)
std = x1.std(dim=1, unbiased=False).reshape(10, 1, 1, 1)
my_ln = (x - mean)/std















 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









