










GradientDescent、Momentum(动量)、Nesterov(牛顿动量)的直觉含义对比:
Gradient Descent
def gd(x_start, step, g):#gradient descent
x = np.array(x_start, dtype='float64')
# print(x)
passing_dot = [x.copy()]#training record
for i in range(50):
grad = g(x)
x -= grad * step
passing_dot.append(x.copy())
print('[ epoch {0} ] grad={1}, x={2}'.format(i, grad, x))
if abs(sum(grad)) < 1e-6:#early stop
break
return x, passing_dot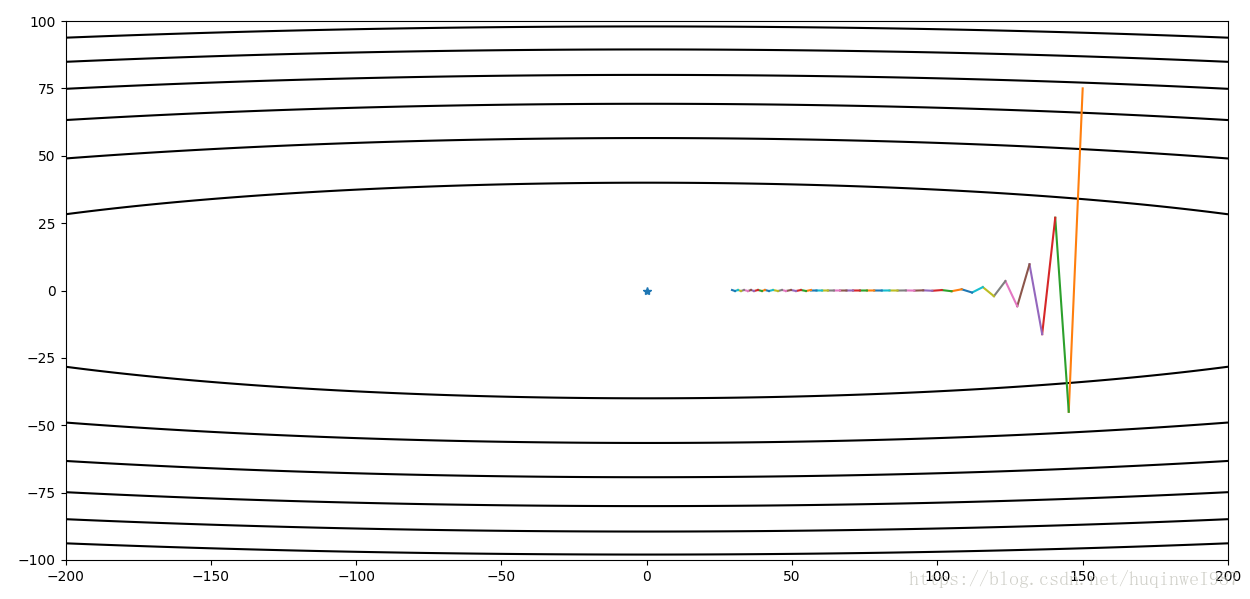
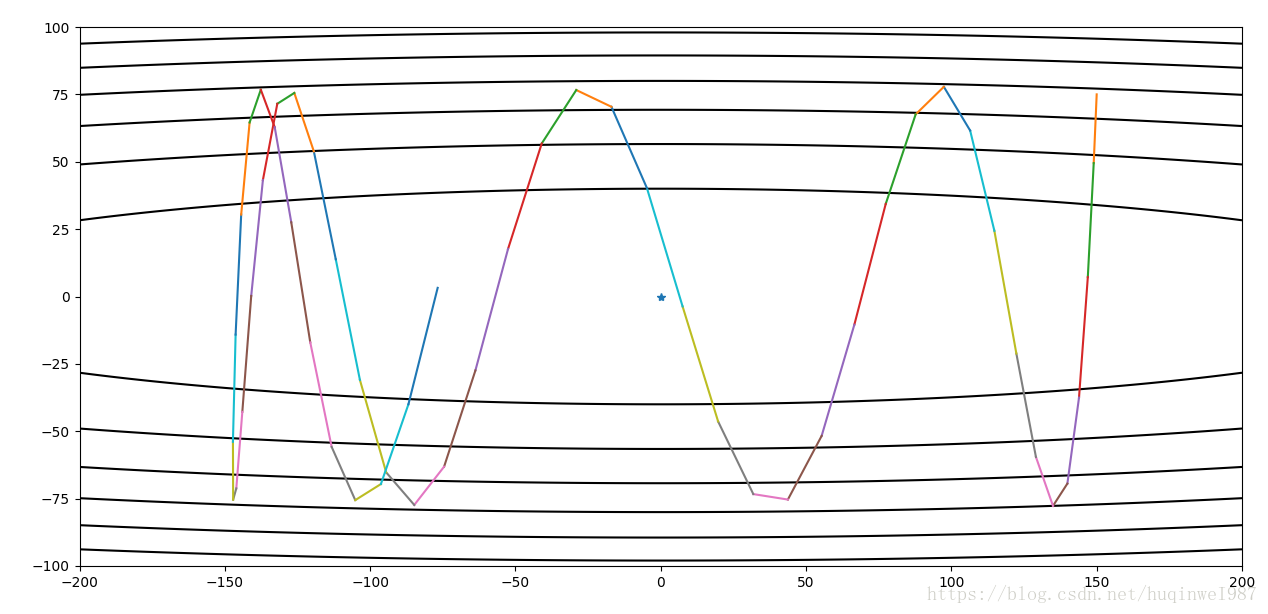
就是有一步走一步,走到哪算哪,比如本例走个之字(zigzag),初期纵向步子大,上下来回绕(如果学习率再大点就不收敛了),后期纵向收敛。但是横向步子小(因为横向纵向梯度不一样,纵向梯度大,横向梯度小),最后没有什么更新动力,最终在50步内没有到达中心点。
Momentum
def momentum(x_start, step, g, discount = 0.7):
x = np.array(x_start, dtype='float64')
passing_dot = [x.copy()]
pre_grad = np.zeros_like(x)
for i in range(50):
grad = g(x)
pre_grad = pre_grad * discount + grad
x -= pre_grad * step
passing_dot.append(x.copy())
print('[ Epoch {0} ] grad = {1}, x = {2}'.format(i,grad,x))
if abs(sum(grad)) < 1e-6:
break
return x, passing_dot

Momentum会保留之前步子的趋势(动量),相比Gradient Descent走过头以后直接返回,Momentum返回“中心”的初期也会向外拉你一把,让你不那么容易回到“正轨”,单纯看这一阶段确实是变慢了——劣势(伏笔),但是宏观上是利大于弊,累加起来以后会越来越稳,最后直接这个把你往外跳的趋势也给拉没了。所以,其实动量算法的抗噪声能力很强。(深度学习很多时候没有全场景全阶段的最优,只有综合的最优,trade off的结果,理论上的最优只有手工干预才能办到)
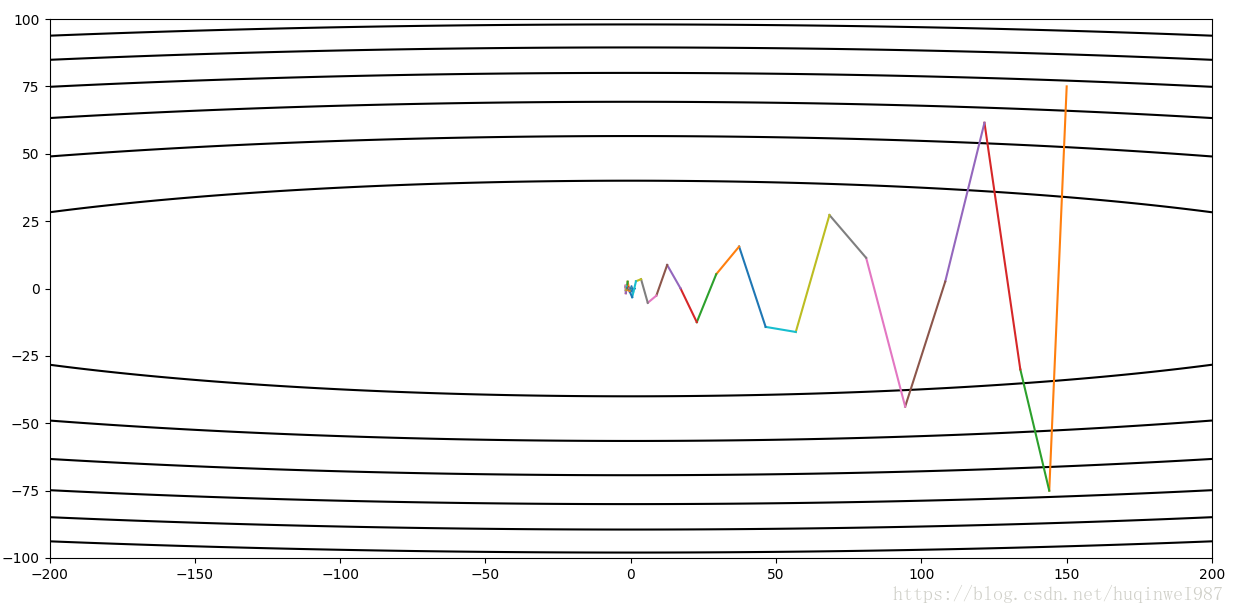
刚才的例子不明显,下边增加一下学习率:同样学习率下,Gradient Descent可能不收敛,而Momentum还能收敛,并且需要很少的步子就能办到。而在横轴方向,Momentum也因为动量累积效应,很容易达到了中心点。这是同样条件下Gradient Descent所没有办到的。
动量衰减的大小意味着之前的趋势是否难以撼动。如果动量衰减很小,也就是discount数值很大,也是不容易收敛的,但是随着步数积累,动量衰减的幂次也增多,还是有收敛的趋势的。
本例比较简单,条件不极端,极端情况下,同方向累积步数过多,如果动量衰减程度低,反而要比Gradient Descent波动还大,所以超参数discount的选择也很重要。
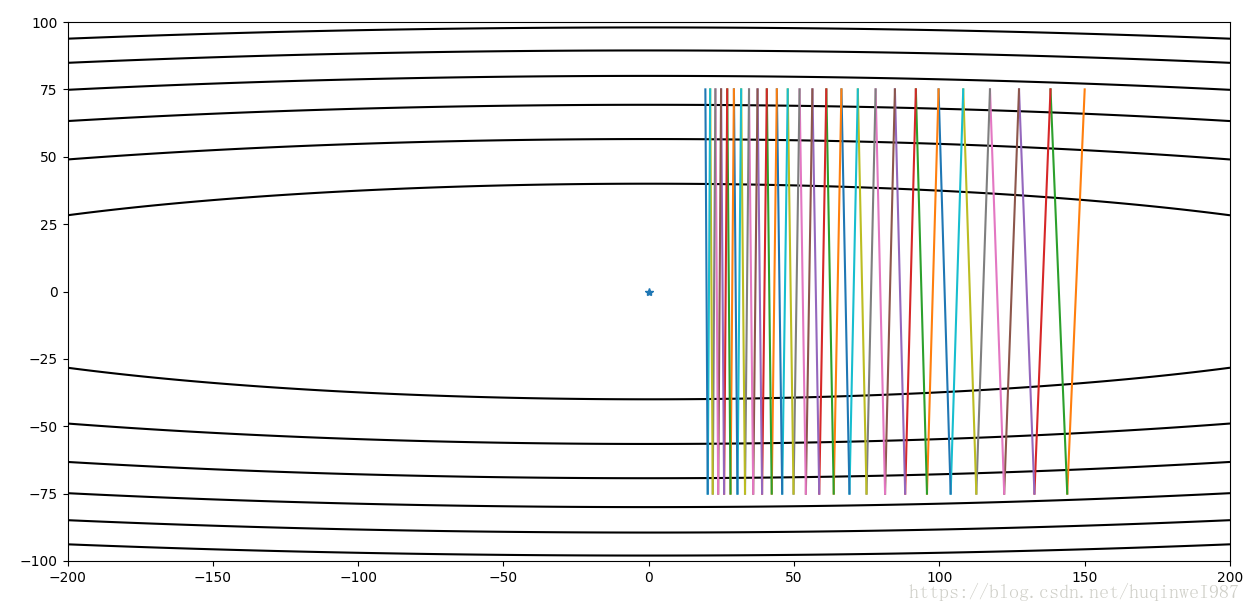
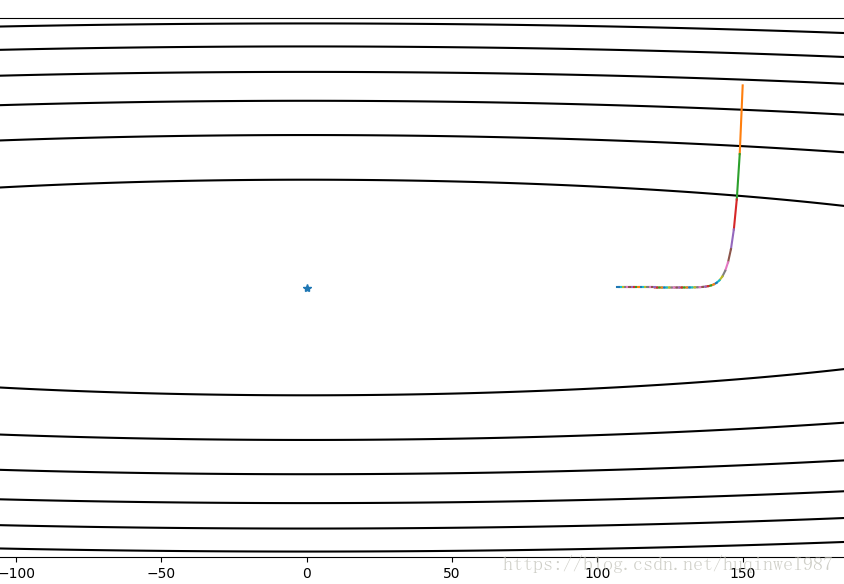
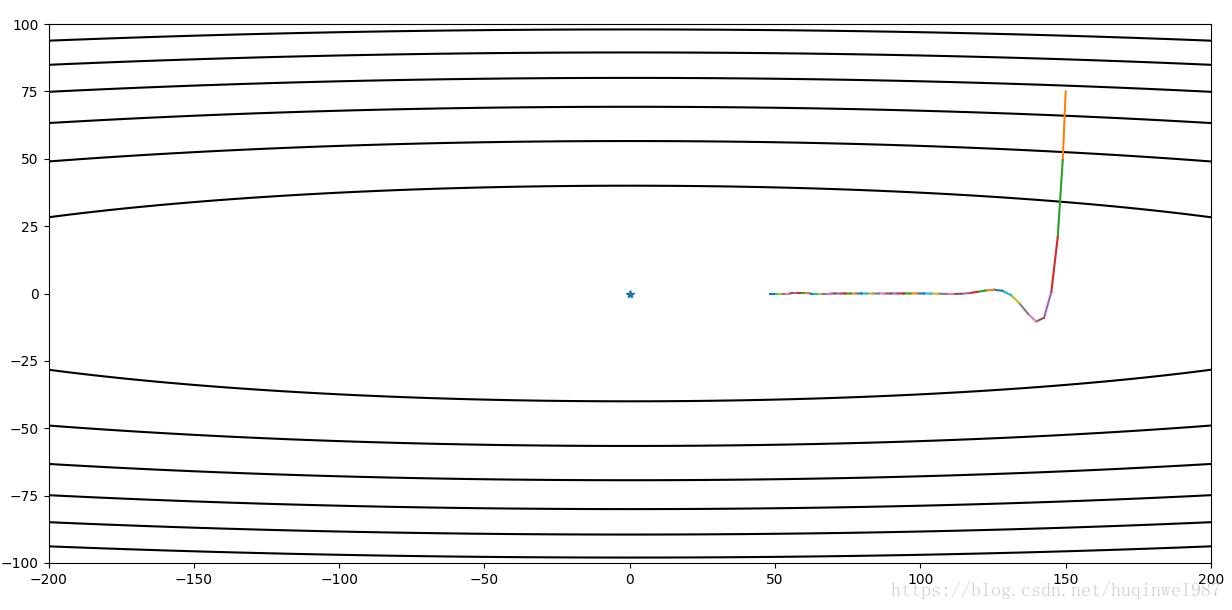
左图,小学习率同方向积累多步情况下,过大discount导致不易收敛(至少是在有限步数下,和前边同条件对比);右图,同学习率下,普通Gradient Descent纵轴早已收敛(因为横纵比例问题,横向停留,前边提过)。但是如果横纵综合起来看,再提升总的训练步数,Gradient Descent还是远不如Momentum的结果好。
可变的discount也可考虑,初期需要的discount小,防止加速逃逸,后期需要的discount大,稳定步伐、加速收敛。
顺便在同学习率下,剧透一个Nesterov效果:
Nesterov
def nesterov(x_start, step, g, discount = 0.7):
x = np.array(x_start, dtype='float64')
passing_dot = [x.copy()]
pre_grad = np.zeros_like(x)
for i in range(50):
x_future = x - step * discount * pre_grad
grad = g(x_future)
pre_grad = pre_grad * discount + grad
x -= pre_grad * step
passing_dot.append(x.copy())
print('[ Epoch {0} ] grad = {1}, x = {2}'.format(i,grad,x))
if abs(sum(grad)) < 1e-6:
break
return x, passing_dotNesterov是Momentum的变种,或者叫Nesterov动量,是受Nesterov算法启发改进的Momentum算法。它是先走到你下一步将要到的那个点,然后把那个“未来的点”的梯度计算出来(取代当前点的地位),直接更新动量和x。
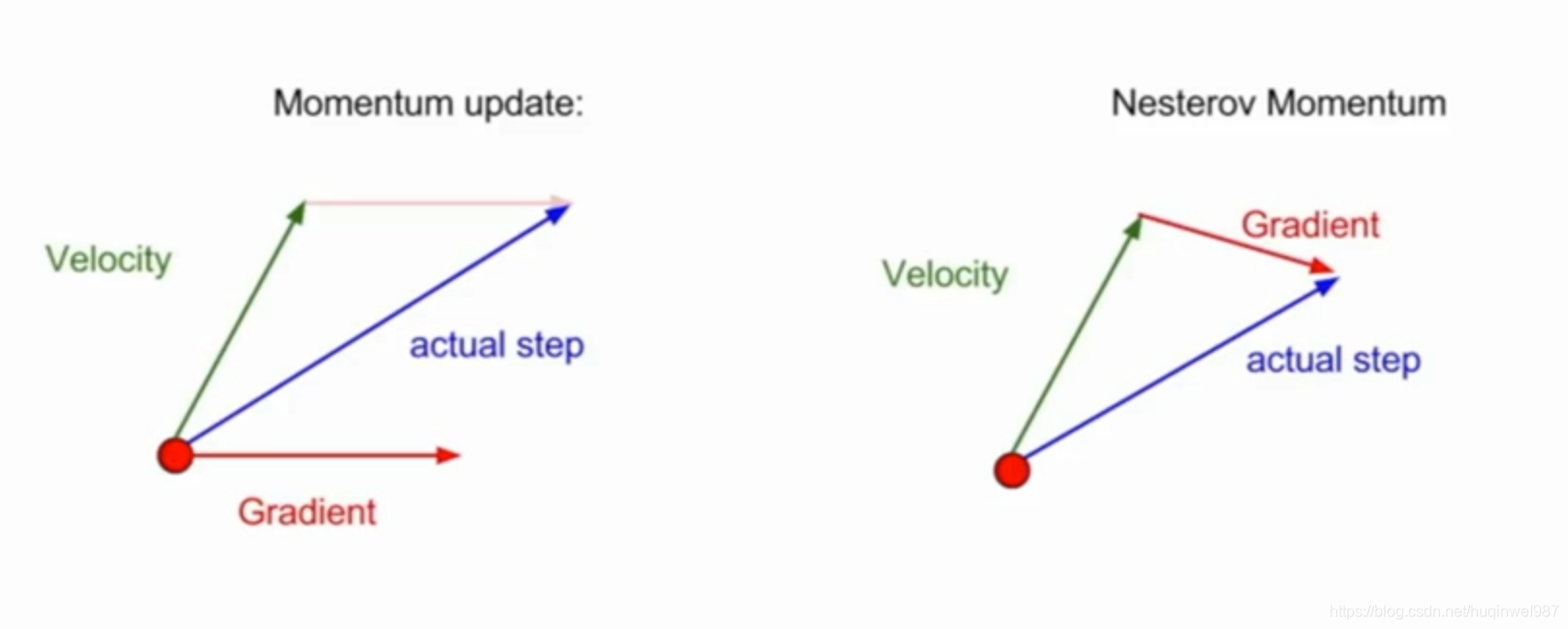
如上图,实际中不光是单方向的正负叠加,还包括多方向,所以最终Momentum向量符合平行四边形法则,而Nesterov,略有不同。
这个特性就非常有意思了,进行第一步之后,如果“第三步”的方向和当前运动方向不一致,如果是Momentum,第二步仍然朝着固有方向前进(加速逃逸),而Nestrov,就会在第二步就提前产生反向的纠正,把x拉回去;如果第三步和运动方向一致,也不会产生放大效应,不会有double位移,因为跳过了第二步,只是“旧三步”替代“旧二步”变成了“新二步”。那么再迭代一次,顶多也就是用新分支下的“新四步”来代替“新三步”成为“新新三步”(因为还是要产生新分支),然后是“新新新四步”,以此类推。
好处:学习率合适,如果下一步趋势不变,可以看做等价替换;如果下一步有加速、减速或者掉头的趋势,又能提前实现。
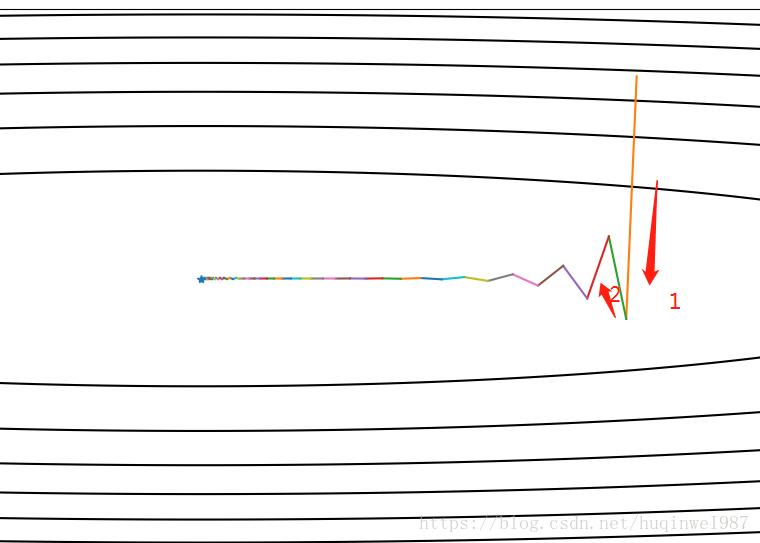
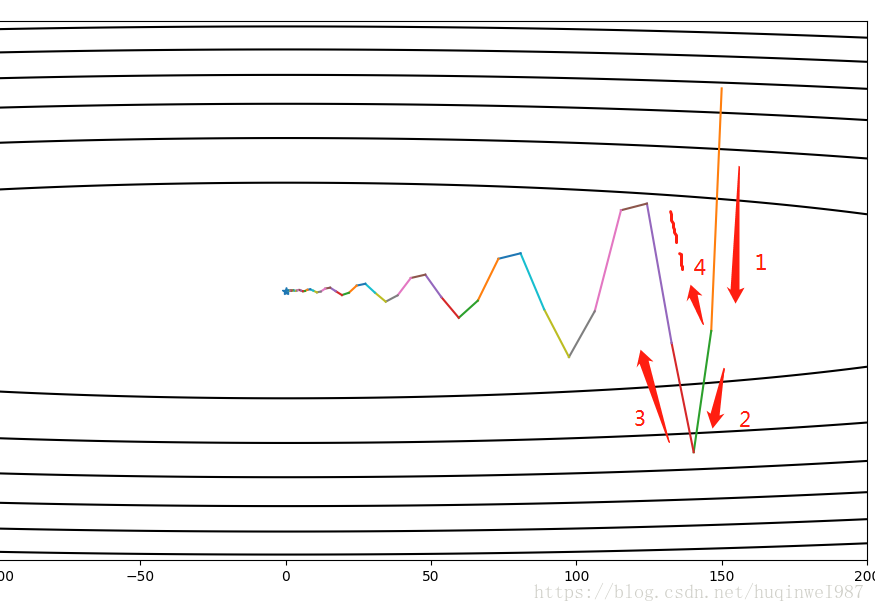
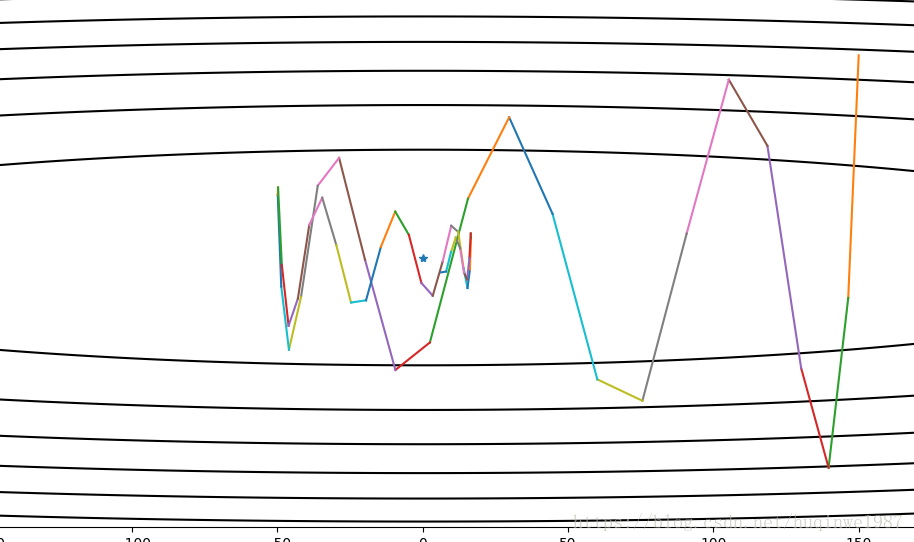
左图Nesterov、右图Momentum
右图向量2是按Momentum本该有的行进路线,3是2结束后的下一步行进路线。1结束后就有了向下的动量,2带着1的向下的趋势多走了一段,“拉不回来”可以算是Momentum的一个劣势。但是Nesterov就不同了,它是“预判加截停”,知道你要去哪个方向,直接绕你前边往回打一巴掌。也就是从向量2的终点去找向量3,近似的看作向量3平移(不是2+3)成了向量4,也就是左图的向量2。这个算法是对Momentum的进一步优化,算是一个修正。本例,直觉地说,前期走过站的操作更容易拉回来了。(前边和Gradient Descent对比时的伏笔,Nesterov解决了这个问题)
下边是Nesterov的第二种写法,这种写法更像《深度学习》算法8.3,而且看着更简洁。
不过两种写法最终效果一样,区别只是pre_grad(动量v)是先乘过step还是在更新x时再乘step。
def nesterov2(x_start, step, g, discount = 0.7):
x = np.array(x_start, dtype='float64')
passing_dot = [x.copy()]
pre_grad = np.zeros_like(x)
for i in range(50):
x_future = x - discount * pre_grad
grad = g(x_future)
pre_grad = pre_grad * discount + grad * step
x -= pre_grad
passing_dot.append(x.copy())
print('[ Epoch {0} ] grad = {1}, x = {2}'.format(i,grad,x))
if abs(sum(grad)) < 1e-6:
break
return x, passing_dot
# res, x_arr = nesterov([150,75], 0.012, g)
res, x_arr = nesterov2([150,75], 0.0034, g)
contour(X,Y,Z,x_arr)
完整代码:https://github.com/huqinwei/tensorflow_demo/blob/master/simple_demo/Momentum_Nesterov_GD.py

















 696
696

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









