







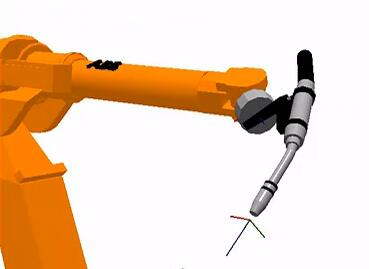
为了描述一个刚体在空间的位姿,需在物体上固连一个坐标系,然后确定该坐标系位姿(原点位置和三个坐标轴姿态),即需要6个DOF来完整描述该刚体的位姿[1]。对于工业机器人,需要在末端法盘安装工具(Tool)来进行作业。为了确定该工具(Tool)的位姿,在Tool上绑定一个工具坐标系TCS (Tool Coordinate System),TCS的原点就是TCP(Tool Center Point,工具中心点)。在机器人轨迹编程时,需要将TCS在其他坐标系的位姿记录到程序中执行。TCP类型的有:常规TCP,固定TCP,动态TCP。
(1)常规TCP:TCP是跟随机器人本体一起运动
工业机器人一般都事先定义了一个TCS,TCS的XY平面绑定在机器人第六轴的法兰盘平面上,TCS的原点与法兰盘中心重合。显然TCP在法兰盘中心。ABB机器人把TCP称为tool0,REIS机器人称之为 _tnull。虽然可以直接使用默认的TCP,但是在实际使用时,比如焊接,用户通常把TCP点定义到焊丝的尖端(实际上是焊枪tool的坐标系在tool0坐标系的位姿),那么程序里记录的位置便是焊丝尖端的位置,记录的姿态便是焊枪围绕焊丝尖端转动的姿态。
(2)固定TCP
将TCP定义为机器人本体以外静止的某个位置。常应用在涂胶上,胶罐喷嘴静止不动,机器人抓取工件移动。其本质是一个工件坐标。
(3)动态TCP
随着更复杂的应用,TCP可以延伸到机器人本体轴外部(外部轴),应用在TCP需要相对法兰盘做动态变化的场合。
参考:
[1] Saeed B. Niku. 《机器人导论-分析、系统及应用》
[2] ABB 机器人的固定工具仿真















 8298
8298

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









