






 本文详细介绍了优傲机器人中TCP点的定义、设置方法及有效负载的配置。涵盖单个与多个TCP点的设定,以及采用四点法进行TCP点的精确设置,确保机器人末端执行器的位置与姿态精准控制。
本文详细介绍了优傲机器人中TCP点的定义、设置方法及有效负载的配置。涵盖单个与多个TCP点的设定,以及采用四点法进行TCP点的精确设置,确保机器人末端执行器的位置与姿态精准控制。
参考视频链接:3 优傲机器人-精确设定TCP
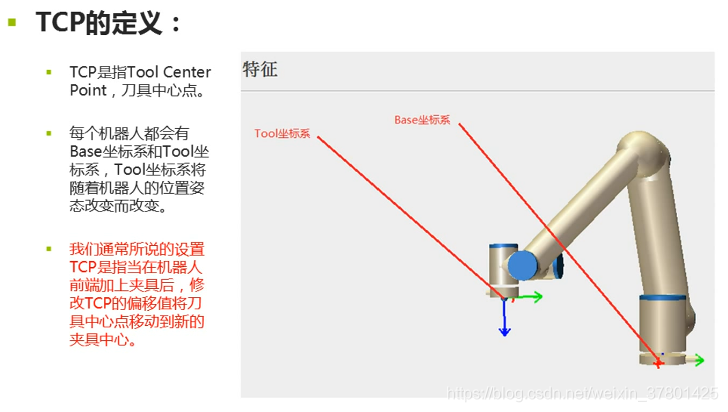
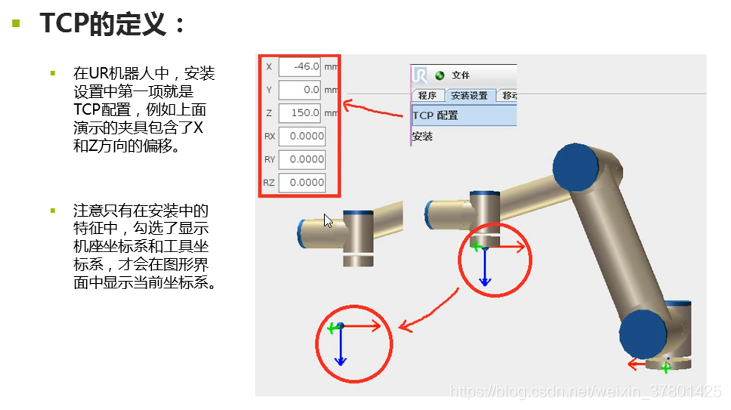
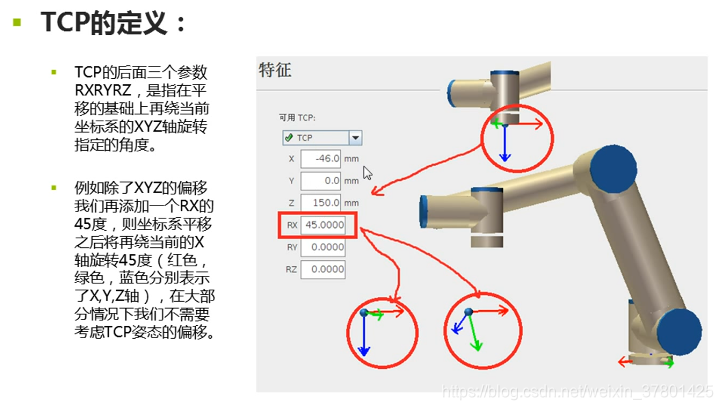
一 TCP点定义
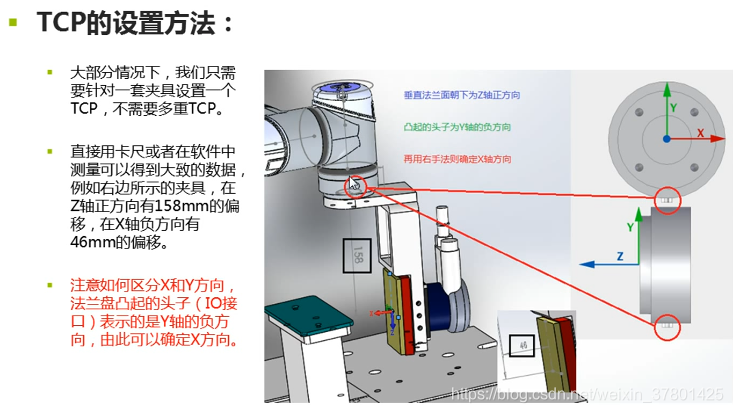
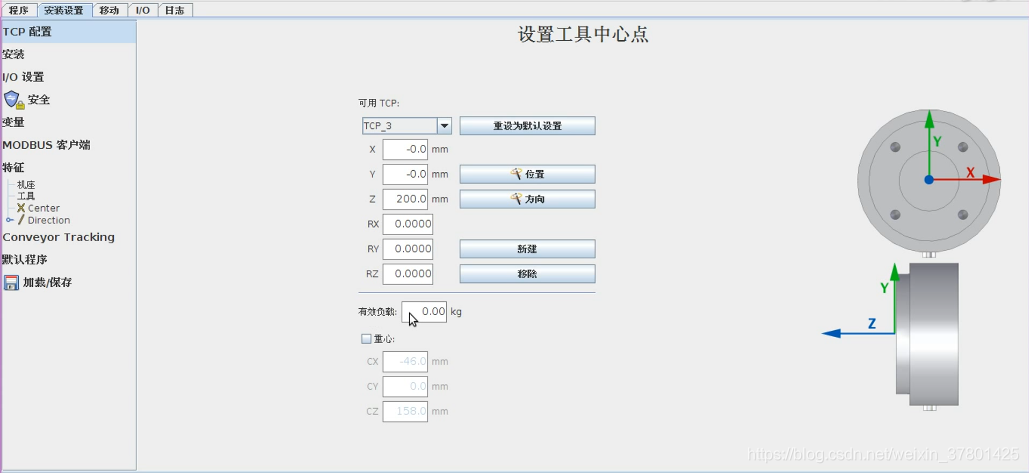
二 TCP设置方法
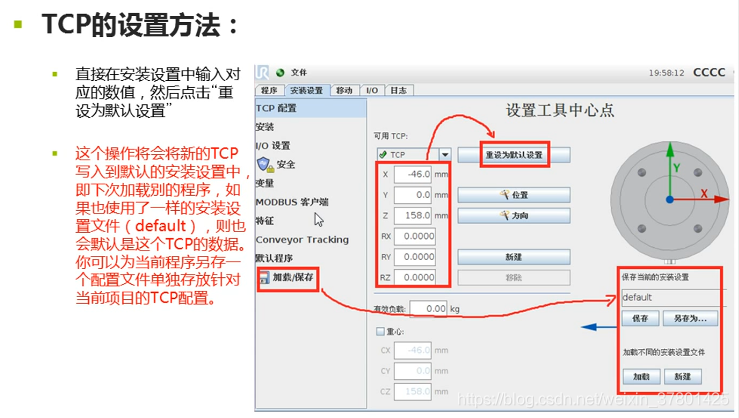
(1)单个TCP点
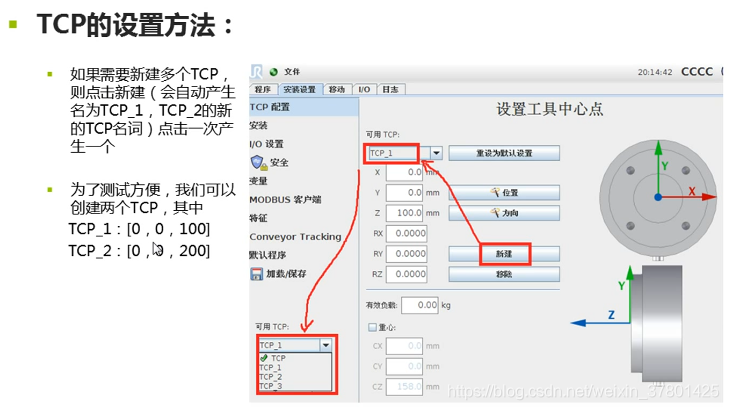
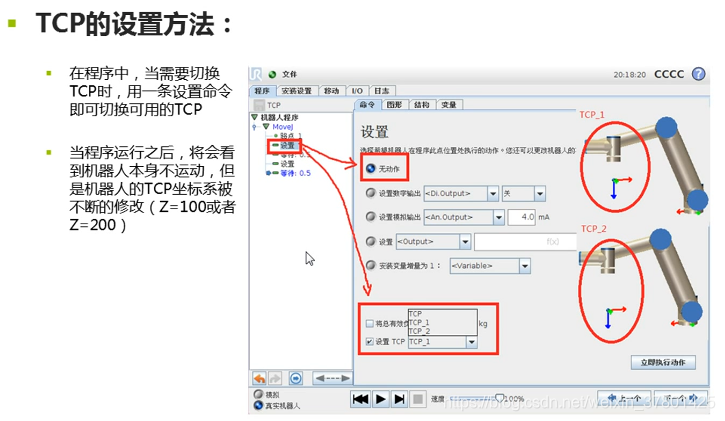
 (2)多个TCP点
(2)多个TCP点
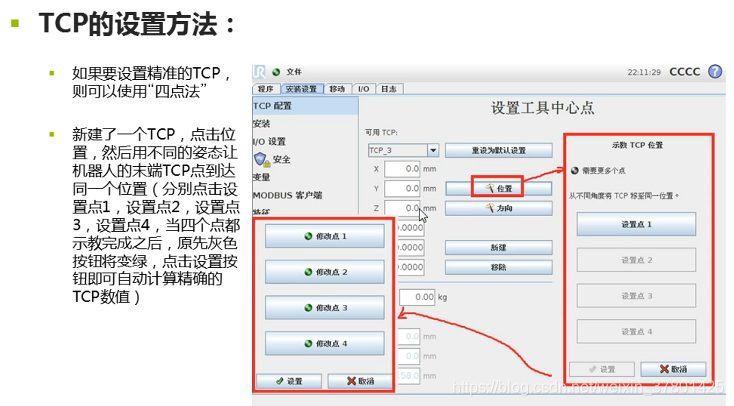
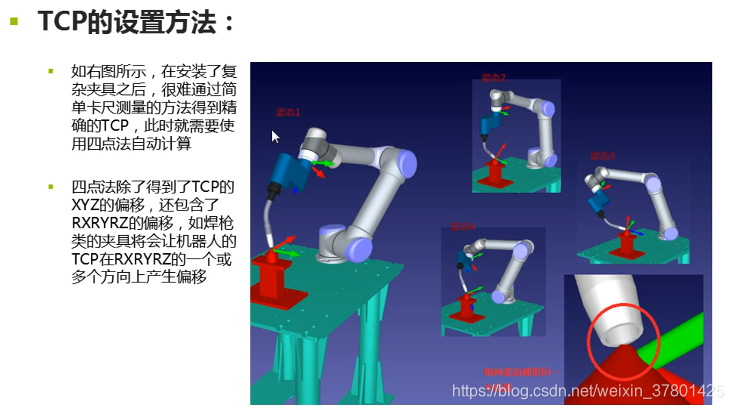
 (3)TCP点精确设置
(3)TCP点精确设置
采用四点发,保持位置不动,改变末端位姿,便可精确计算TCP点
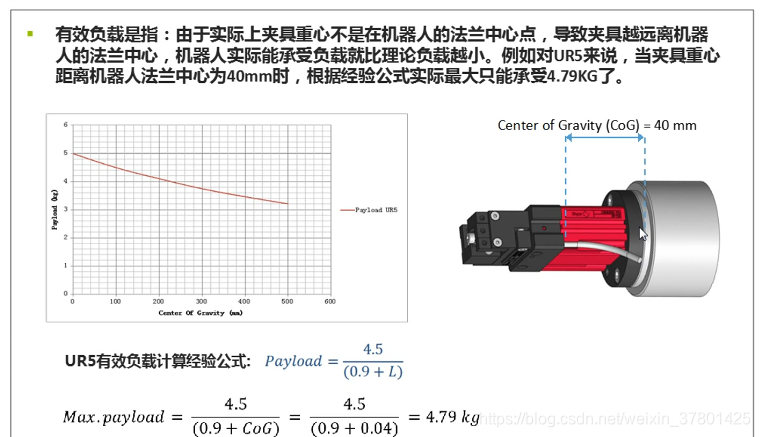
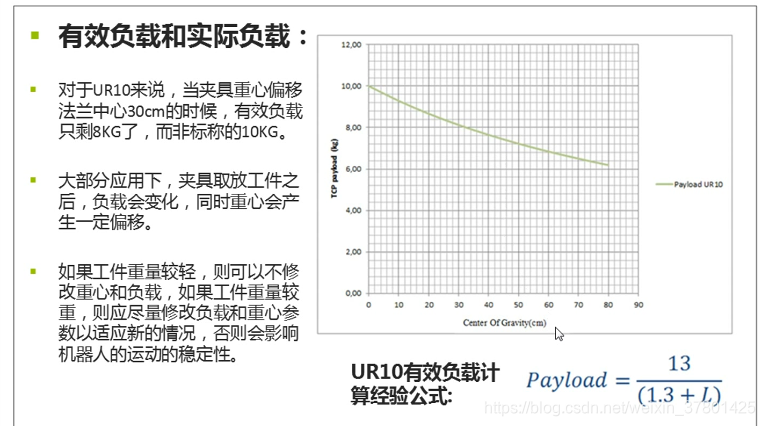
三 有效负载设置

参考视频链接:3 优傲机器人-精确设定TCP
(1)单个TCP点
(2)多个TCP点
(3)TCP点精确设置
采用四点发,保持位置不动,改变末端位姿,便可精确计算TCP点
 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























