






六轴机械臂353粒子群轨迹规划代码 复现居鹤华论文 可输出关节收敛曲线 和关节位置 速度 加速度曲线
还有六自由度机械臂混沌映射粒子群5次多项式时间最优轨迹规划 3次多项式 3次b样条 5次b样条 算法可根据需求换成其他智能算法
ID:33180667004301510
余生的梦1121
六轴机械臂353粒子群轨迹规划代码,作为一种先进的机械臂轨迹规划方法,已经在工业自动化领域得到广泛应用。本文将对六轴机械臂353粒子群轨迹规划代码进行复现,并介绍其输出的关节收敛曲线、关节位置、速度和加速度曲线。此外,我们还将研究六自由度机械臂混沌映射粒子群5次多项式时间最优轨迹规划以及3次多项式、3次b样条和5次b样条的算法。这些算法可根据需求灵活切换,并能够实现机械臂精确的轨迹规划。
首先,我们来看六轴机械臂353粒子群轨迹规划代码的复现过程。六轴机械臂是一种具有6个旋转关节的机器人系统,能够实现复杂的运动任务。粒子群算法是一种模拟鸟群行为的优化算法,通过模拟群体中个体的移动和信息共享来寻找最优解。在六轴机械臂353粒子群轨迹规划代码中,粒子群算法被用于优化机械臂的轨迹规划,以实现关节收敛曲线、关节位置、速度和加速度的精确控制。
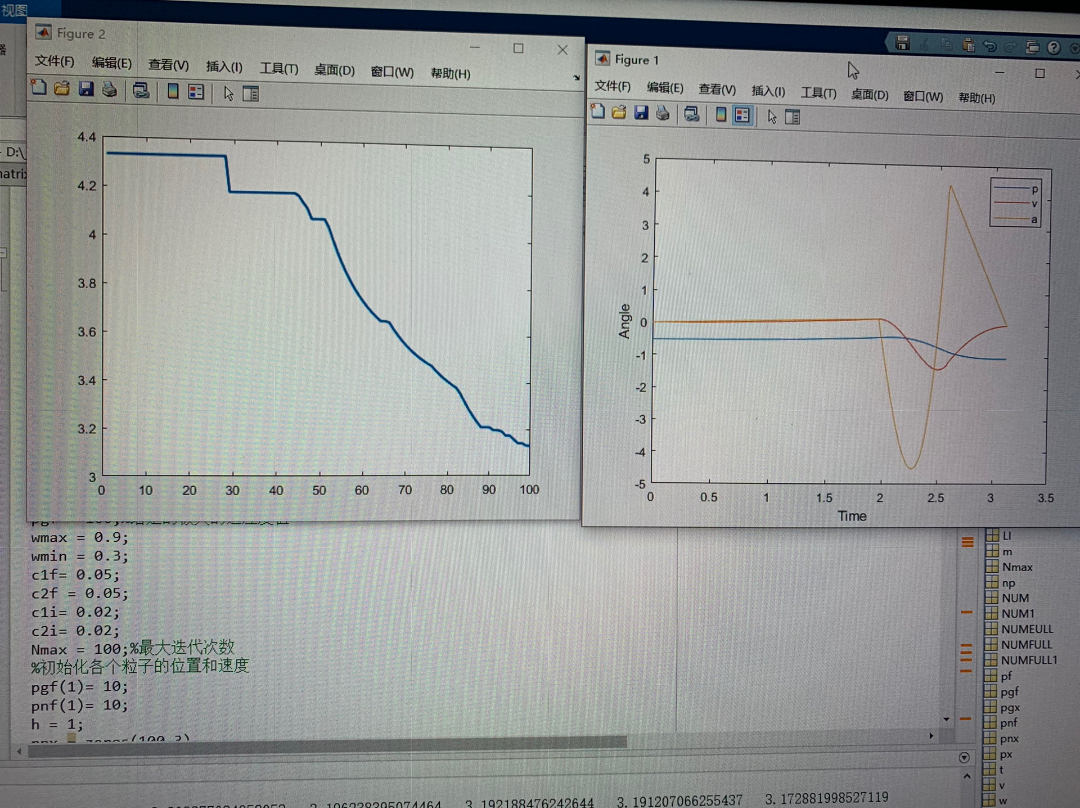
关节收敛曲线是指机械臂各个关节在规定时间内收敛到目标位置的曲线。通过粒子群算法优化的轨迹规划代码,可以得到关节收敛曲线的精确控制。关节位置是机械臂各个关节在规定时间内的位置坐标。通过粒子群算法优化的轨迹规划代码,可以实现机械臂关节位置的准确定位。速度和加速度曲线反映了机械臂在运动过程中的速度和加速度变化情况。通过粒子群算法优化的轨迹规划代码,可以实现机械臂运动过程中速度和加速度的精确控制。
接下来,我们将研究六自由度机械臂混沌映射粒子群5次多项式时间最优轨迹规划以及3次多项式、3次b样条和5次b样条的算法。这些算法是常用的机械臂轨迹规划方法,能够实现机械臂复杂运动路径的优化规划。混沌映射算法基于混沌理论,通过引入随机性和非线性性来增加算法的收敛速度和全局搜索能力。5次多项式时间最优轨迹规划算法可以实现机械臂在规定时间内最短时间到达目标位置的轨迹规划。3次多项式和3次b样条算法可以实现机械臂平滑运动的轨迹规划。5次b样条算法可以实现机械臂曲线运动的轨迹规划。这些算法可以根据需求进行灵活切换,以实现机械臂轨迹规划的多样性和精确性。
综上所述,本文围绕六轴机械臂353粒子群轨迹规划代码展开讨论,并介绍了其关节收敛曲线、关节位置、速度和加速度曲线的精确控制。此外,我们还研究了六自由度机械臂混沌映射粒子群5次多项式时间最优轨迹规划以及3次多项式、3次b样条和5次b样条的算法。这些算法能够实现机械臂轨迹规划的多样性和精确性,进一步推动了工业自动化领域的发展。希望本文能够对读者了解机械臂轨迹规划方法和代码实现有所帮助,为技术研发和应用提供启示。
相关的代码,程序地址如下:http://nodep.cn/667004301510.html
















 5478
5478

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









