






A星算法实现 单个AGV路径规划及避障代码
tips:1.静态障碍物;2.障碍物、AGV位置可随意调节;2.A星算法实现,代码实现过程快较遗传&蚁群快很多,为全局路径搜索;3.Matlab建模与仿真实现。
ID:7580670328003591
尽职的巴沙鱼
A星算法实现 单个AGV路径规划及避障代码
在自动导航系统中,路径规划是一个重要的技术,它能够帮助自主移动车辆(AGV)有效地避开障碍物,快速到达目标位置。本文将介绍如何使用A星算法来实现单个AGV的路径规划和避障,并通过Matlab进行建模与仿真实现。
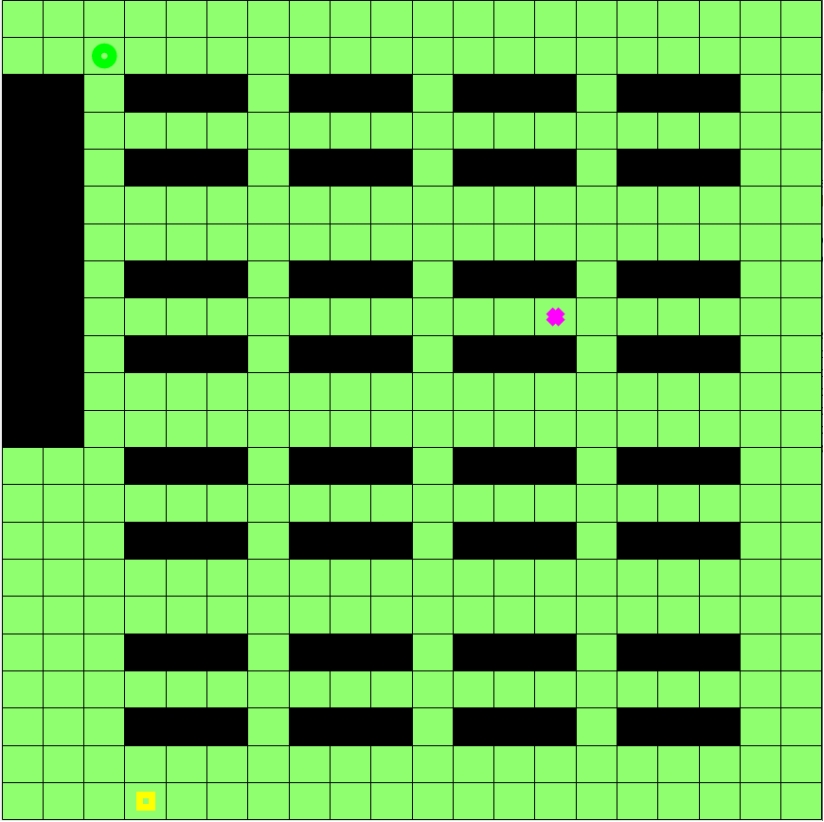
在路径规划中,存在静态障碍物。这些障碍物可以是固定不动的物体,如墙壁、柱子等。同时,AGV的位置和障碍物的位置都可以随意调节,以满足不同场景下的需求。
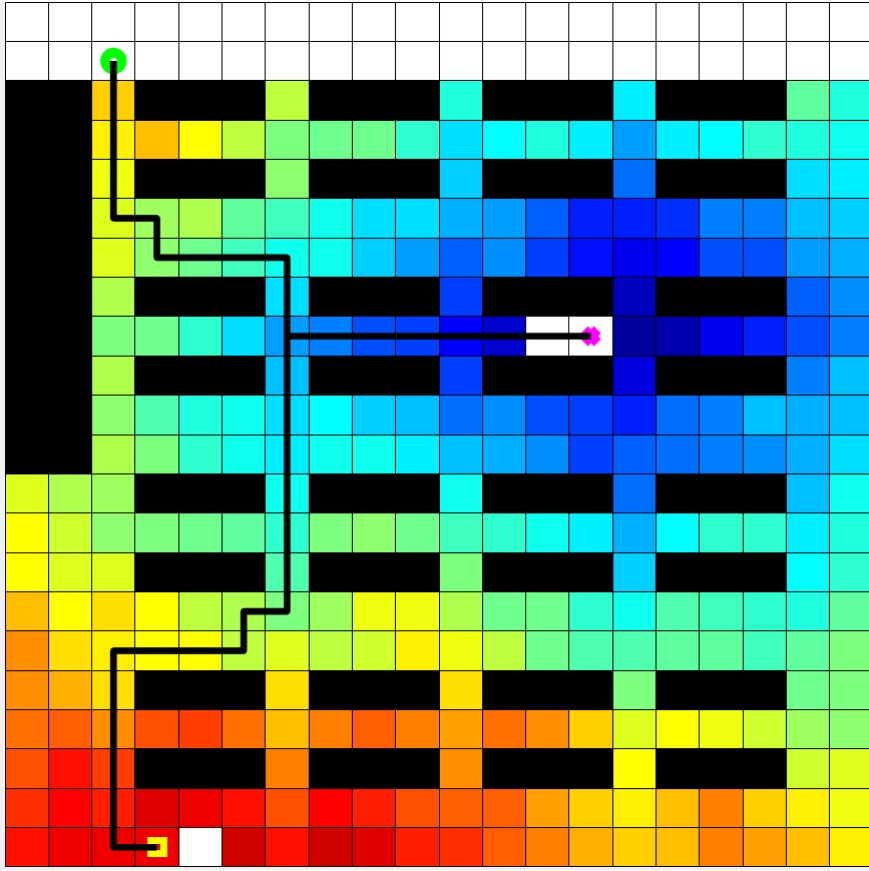
A星算法是一种常用的全局路径搜索算法,它能够快速找到最优路径。相比较遗传算法和蚁群算法,A星算法的代码实现过程更为简单高效。以下是A星算法的具体步骤:
- 定义起点和终点。将起点设置为AGV的当前位置,将终点设置为目标位置。
- 初始化开放列表和关闭列表。开放列表用于存储待扩展的节点,关闭列表用于存储已经扩展过的节点。
- 将起点添加到开放列表。
- 当开放列表不为空时,重复以下步骤:
a. 从开放列表中选择F值最小的节点作为当前节点。
b. 将当前节点从开放列表中移除,并添加到关闭列表中。
c. 遍历当前节点的邻居节点,计算其G值、H值和F值。
d. 如果邻居节点已经在关闭列表中,忽略它。
e. 如果邻居节点不在开放列表中,将其添加到开放列表中。
f. 如果邻居节点已经在开放列表中,并且新的G值小于旧的G值,更新邻居节点的父节点和G值。
g. 如果终点在开放列表中,路径搜索完成。 - 从终点开始,根据每个节点的父节点逐步回溯,得到最优路径。
通过Matlab进行建模与仿真实现可以更直观地展示路径规划和避障的效果。在建模过程中,可以使用二维或三维的场景模型,将AGV、障碍物、起点和终点等元素进行可视化表示,并根据实际需求对其进行调整。
通过以上步骤和实现方法,我们可以实现单个AGV的路径规划及避障代码。这样,AGV就能够通过A星算法找到最优路径,避开各种静态障碍物,并快速到达目标位置,实现自主导航功能。
综上所述,A星算法在单个AGV的路径规划和避障中具有重要的应用价值。通过Matlab进行建模与仿真实现,可以更好地展示路径规划的效果。在实际应用中,我们可以根据具体场景的需求,对算法和代码进行进一步优化和扩展,以满足不同的自主导航需求。
相关的代码,程序地址如下:http://wekup.cn/670328003591.html


















 1564
1564

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









