






sumo carla 自动驾驶联合仿真 安装 配置 教程 开发 驾驶模拟 强化学习 轨迹预测 轨迹规划

标题:基于SUMO和CARLA的自动驾驶联合仿真系统安装与配置:教程与开发探索
摘要: 随着自动驾驶技术的迅猛发展,仿真环境在自动驾驶系统的评估、训练和验证中扮演着重要的角色。本文介绍了基于SUMO(Simulation of Urban MObility)和CARLA(Car Learning to Act)的自动驾驶联合仿真系统,探讨了安装与配置过程,并重点阐述了其在强化学习、轨迹预测和轨迹规划等方面的应用。
-
引言 自动驾驶技术的发展对仿真环境提出了更高的要求。SUMO作为一款开源的交通仿真软件,可以模拟城市交通环境,而CARLA则提供了一个高度可定制的汽车驾驶仿真平台。结合二者,可以构建出一个功能强大的自动驾驶联合仿真系统。
-
SUMO的安装与配置 2.1 SUMO的安装过程 详细介绍了SUMO的安装与配置过程,包括环境准备、下载与编译SUMO源码、安装依赖库等。 2.2 SUMO的配置与使用 介绍了SUMO的配置文件与参数设置,包括路网文件、车辆定义文件以及仿真参数等,以及如何使用SUMO进行简单的交通仿真。
-
CARLA的安装与配置 3.1 CARLA的安装过程 提供了CARLA的安装步骤,包括环境准备、下载与编译CARLA源码、安装依赖库等。 3.2 CARLA的配置与使用 介绍了CARLA的配置文件与参数设置,包括地图定义、车辆与传感器设置等,以及如何使用CARLA进行车辆驾驶仿真。
-
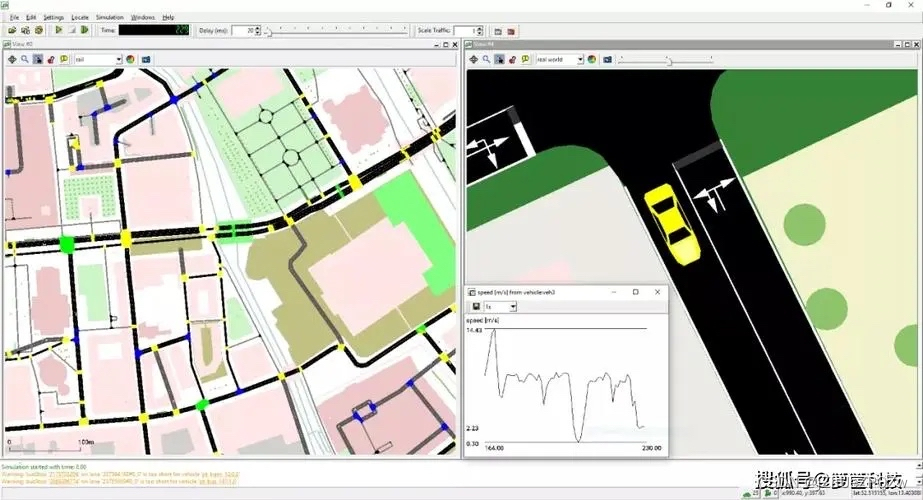
自动驾驶联合仿真系统的搭建 4.1 SUMO与CARLA的集成 详细讲解了如何将SUMO与CARLA联合起来,进行自动驾驶仿真系统的搭建。 4.2 自动驾驶算法与实现 探讨了强化学习在自动驾驶仿真中的应用,以及如何基于联合仿真系统进行算法开发和训练。
-
自动驾驶联合仿真系统的应用 5.1 轨迹预测 阐述了在联合仿真系统中,如何利用历史轨迹数据进行车辆轨迹预测,提高自动驾驶系统的安全性与鲁棒性。 5.2 轨迹规划 分析了基于联合仿真系统的轨迹规划算法,包括基于马尔可夫决策过程(MDP)和深度强化学习的轨迹规划方法。
-
结论与展望 总结了本文介绍的基于SUMO和CARLA的自动驾驶联合仿真系统的安装与配置过程,以及其在强化学习、轨迹预测和轨迹规划等方面的应用。并展望了未来联合仿真系统在自动驾驶技术发展中的潜力与挑战。
本文详细介绍了基于SUMO和CARLA的自动驾驶联合仿真系统的安装与配置过程,并探讨了其在强化学习、轨迹预测和轨迹规划等方面的应用。通过本文的指导,读者可以掌握如何搭建自动驾驶联合仿真系统,并在其中开展自动驾驶算法的研究与实现。希望本文能为自动驾驶技术的研究与应用提供有力的支持。
关键词:SUMO, CARLA, 自动驾驶, 联合仿真, 强化学习, 轨迹预测, 轨迹规划
相关代码,程序地址:http://imgcs.cn/lanzoun/673613315501.html















 685
685











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









