







拆机日本日立和韩国LG合资产360度激光雷达,新款,体积小巧,这款雷达还在turtlebot3小车平台上也在用,雷达都是17年新款测试机拆解出来的,数量不多,成色都很好,个别有的激光视窗都还有贴膜,带线插头雷达全部测试好发货。
剪线的雷达测试麻烦都没有测试就便宜处理了。
这批货还有挑出来几十个有剪线的,这种特价90元一个特价处理,成色都是非常好的。
网友反馈雷达接线定义:
6P插口橙色的线必须和电机2P插口的黑色线接在一起,电机2P红线接5V。然后串口线接6P插口的红接5V,黑接负极,绿色接txd,棕色接RXD,波特率230400,通上电,在串口调试工具里面发送一个 b ,雷达就会开始旋转,等他稳定了,就会开始返回数据,要停止的话就发送 e。
具体了解资料可以查询ROS官网,店主程序也是菜鸟。需要雷达PDF图纸,测试程序,解码文件,还有12G的ROS开发教学资料,需要资料可以联系店主,都是网友贡献的。
雷达重110克,带底座130克。

















360激光雷达介绍
https://www.bilibili.com/video/av6226077
激光雷达在ROS下测试
https://www.bilibili.com/video/av5078351/?spm_id_from=333.788.videocard.6
The Open Lidar Project - Hack the Neato XV-11 Lidar for a $200 Bounty!
机器人项目
http://forums.trossenrobotics.com/robots.php
详细规格文件
以下链接包含有关基本性能,测量性能,机制布局,光路,数据信息,引脚说明和命令的信息。
这是详细规范文档:PDF
http://emanual.robotis.com/assets/docs/LDS_Basic_Specification.pdf
http://emanual.robotis.com/docs/en/platform/turtlebot3/appendix_lds_01/
http://emanual.robotis.com/docs/en/platform/turtlebot3/appendix_lds_01/#appendix-lds01

http://www.xevelabs.com/doku.php?id=product:usb2lds:usb2lds
https://github.com/Xevel/usb2lds
https://github.com/ROBOTIS-GIT/emanual/blob/master/docs/en/platform/turtlebot3/appendix_lds_01.md




Neato真空吸尘器的激光雷达由模糊逻辑控制
https://www.pobot.org/LIDAR-aspirateur-Neato-en-logique-floue.html?lang=fr
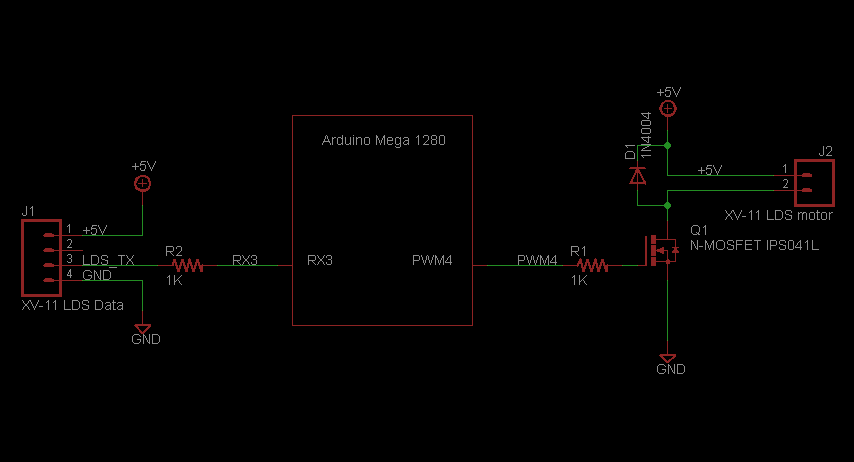
这款激光雷达的优势在于它很小(即:不太大),并且很容易与arduino卡(MEGA 1280)连接,这要归功于Xevel编写的驱动程序。
(请参阅:您将在以下地址找到
来源:https://github.com/Xevel/NXV11
文档:https://github.com/Xevel/NXV11/wiki


Turtlebot3-burger入门教程-软件清单
https://www.ncnynl.com/archives/201707/1816.html















 1780
1780

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









